

Монтаж та налагодження технічних засобів автоматизованих систем лекція 47.
Тема: «Наладка математичного забезпечення інформаційної частини АСУ ТП.»
План лекції
Наладка підсистеми первинної переробки інформації.
Наладка діалогової підсистеми.
Наладка підсистеми виведення повідомлень і видачі дій, що управляють.
Наладка підсистеми організації і доступу до бази даних, диспетчеризації завдань.
Наладка сервісних підсистем.
Контрольні питання.
Самостійна робота.
Література.
Викладач О.Л.Климаш
Підсистема первинної переробки інформації (ППІ) забезпечує опитування датчиків аналогових, дискретних, ініціативних і інших сигналів, контроль достовірності отриманої інформації, згладжування і усереднювання на заданих інтервалах, масштабування, лінеаризацію і введення поправок в результати вимірів.
Залежно від вимог по точності, швидкодії і перешкодостійкості системи формується конфігурація технічних засобів УСО УВК і організація програм обробки інформації. Наприклад, нормалізація сигналів від термоелектричних перетворювачів може здійснюватися апаратурно (із застосуванням модулів нормалізації) або програмно (шляхом введення загальної для усіх перетворювачів поправки по температурі холодного спаю, вимірюваній одним термоперетворювачем опори на зборці зажимів).
При наладці підсистеми ППІ перевіряється адресність, правильність включення кожного параметра в певну групу по частоті опитування, установка регламентних меж і меж аварійної сигналізації, вибір періодів усереднювання, забезпечення необхідної точності лінеаризації сигналів від витратомірів, термоперетворювачів опору і термоелектричних перетворювачів.
У багатьох випадках при наладці систем ППІ встає питання про метрологічну атестацію каналів введення інформації, що має велике значення для груп госпрозрахункових параметрів, в завданнях розрахунку ТЕП і деяких якісних показників (наприклад, октанового числа бензину), що обчислюються по моделях. При цьому системи введення інформації, обробки її в УВК і представлення операторові розглядаються як агрегатні засоби виміри (АЗВ), що підлягають прийманню і періодичній перевірці аналогічно прийманню і перевірці традиційних систем технологічного контролю. Державними стандартами передбачають розрахунковий, експериментальний і розрахунково-експериментальний методи атестації.
При розрахунковому методі погрішність кажного каналу розраховується виходячи з допустимих погрішностей усіх пристроїв, що входять в комплект, і програм.
При експериментальному методі проводиться пред'явлення і здача поверителю усього каналу. Цей метод найбільш точний, але трудомісткий і важко реалізовується. На практиці атестацію технічних засобів ВК і прог-раммных засобів найзручніше здійснюють на підставі експериментальних результатів перевірки, а загальну погрішність обчислювати з урахуванням класу точності первинних перетворювачів і інших пристроїв, що входять в канал виміру.
Пояснимо сказане прикладом оцінки погрішностей програмної частини АСУ ТП.
Нелінійні характеристики датчиків температури (термоелектричних перетворювачів і термоперетворювачів опору) при введенні сигналів від них в УВК можуть бути апроксимовані залежністю
Т = k1 U2 + k2 U + b (1.1)
де Т — значення вимірюваного параметра, °С;
U — сигнал від датчика;
k1, k2, b — коэффіциєнти, визначувані при апроксимації статичної характеристики перетворювача залежністю (1.1).
При математичній апроксимації сигналів, наприклад, від термоелектричних перетворювачів залежністю (1.1) відносна погрішність складає 0,4 — 1,1%.
Для зниження погрішності застосовують інші методи апроксимації, зокрема метод кусочно-лінійної апроксимації, описуваємий алгоритмом, при якому увесь діапазон виміру розбивається на ряд піддіапазонів, в кожному з яких нелінейна залежність апроксимується лінейною
Т = k U + а. (1.2)
При апроксимації по (1.2) погрішність виміру температур по піддіапазонах не перевищує 0,9 °С, при апроксимації по (1.1) — 3,01 °С. Таким чином, спосіб апроксимації по (1.2) є прийнятнішим.
При узкопредельных вимірах (наприклад, при діапазоні виміру 450 — 540 °С) точність математичної обробки може бути підвищена за рахунок як розбиття діапазону виміру на піддіапазони і відповідного вибору коефіцієнтів, так і обліку систематичної складової погрішності реального термоелектричного перетворювача.
Таким чином, погрішність виміру істотно залежить від прийнятого програмного забезпечення системи.
Діалогова підсистема призначена для спілкування людини з машиною і дозволяє користувачеві забезпечити доступ до необходної на кожному рівні управління інформації, захист від несанкціонованого або помилкового введення даних, технологічну сигналізацію, видачу інформації по запиту оператора або за ініціативою системи в цифровій або графічній формі на чорно-білі або кольорові відеотермінали і реєстрацію цієї інформації.
Від діалогової підсистеми в значної мірі залежить, чи «приживеться» ця АСУ ТП. Дуже важливі форми представлення інформації, простота її розуміння, можливість йти від «загального до окремого», тобто отримання загального уявлення про стан процесу і можливість виявлення стану кожного апарату або параметра. Якщо технологу для виклику таблиці параметрів, що цікавлять його, доводиться здійснювати більше двох-трьох натиснень на клавіші дисплея, запам'ятовування яких ускладнене, то це вже є передумовою для коригування діалогової підсистеми.
Особливо чітко має бути налагоджена робота діалогової підсистеми в режимах передачі управління об'єктом на УВК і назад, при цьому мають бути забезпечені бестолчковые переходи при включенні або відключенні окремих підсистем, завдань і груп параметрів, чіткість представлення інформації при аварійній ситуації і відмові пристроїв обчислювального комплексу.
Діалогова підсистема повинна предоставляти можливість контролювати роботу усіх програм, діагностувати і усувати несправності, вмикати і вимикати окремі завдання, коригувати параметри налаштування регуляторів, регламентні і аварійні межі параметрів, нарощувати систему, включаючи нові завдання без зміни (бажано і без відключення на час наладки) вже працюючих підсистем і завдань. Остання вимога являється одним з найважливіших при оцінці придатності розробленого проекту до наладки і внедренню, оскільки на практиці включити увесь набір запроектованих завдань при пуску об'єкту не вдається.
При наладці діалогової підсистеми необхідно звернути увагу на зручний для оператора-технолога розподіл параметрів по групах, забезпечення необхідної швидкості виклику, розподіл інформації користувачам (на дисплей диспетчера або начальника цеху виводяться укрупнені дані, операторові — детальніші і т. п.). Велике значення має правильна настройка вузлів захисту від випадкових помилок оператора і від несанкціонованого введення даних (наприклад, оператор-технолог не повинен змінювати параметри динамічного налаштування регуляторів або регламентні межі параметрів), випадкової «гри» з клавіатурою відеотерміналу.
Підсистеми виведення повідомлень і видачі дій, що управляють, забезпечують своєчасну видачу інформації або збереження її у разі перевантаження УВВ. Недопустима втрата частини інформації із-за недостачногї швидкодії друкуючих пристроїв або їх відмови. Недопустима також видача помилкових дій, що управляють, при відмовах пристроїв або збоях у ВК. Ці під-системи забезпечують живучість системи в цілому і будуються таким чином, що пристрої виведення інформації реалізуються в ланцюзі дублювання, резервування і замеще-ния. Наприклад, при відмові пристрою швидкого друку (ПШД) інформація почне виводиться на пристрій реєстрації, наприклад знакосинтезирующее, і т. п.
При розподілі пам'яті для цих задач має бути забезпечена достатня місткість буфера повідомлень, щоб буфер не переповнювався при великому потоці повідомлень, наприклад в аварійній ситуації.
Підсистема видачі керівників впливань повинна забезпечувати не лише передачу і перетворення цифроаналогової інформації за заданою адресою, але і безтолчкові| переходи при включенні і відключенні окремих контурів і захищати об'єкт від помилкових керівників сигналів. Такий захист реалізується як програмно, так і апаратурно. Наприклад, при управлінні від УВК пневматичним виконавчим механизмів| в системі безпосереднього цифрового управління (НЦУ) може бути застосований пневматичний (на елементах УСЭППА) блок обмеження за швидкістю видачі сигналу (реалізований як обмежувач за такт видачі), що управляє. В цьому випадку навіть при повній відмові УВК (чи при відключенні напруги живлення установки|) пневмосигнал|, більший допустимого, на виконавчий механізм не пройде, оскільки є пневматичні місткості (ресівери), роботоспособність| пневматичних систем, що забезпечують, на якийсь час, достатнє| для усунення аварійної ситуації| або переходу на ручне управління.
Організація бази даних визначає такі важливі показники системи, як швидкодію (особливо для систем із зовнішньою пам'яттю), об'єм завдань при обмежених ресурсах оперативної пам'яті і так далі
Що реалізовуються АСОВІ ТП завдання классифікують по швидкодії і значущості, і їм привласнюються певні приоритети|.
Якщо під час виконання рішення будь-якої задачі з'явиться запит від більше за приоритетного | завдання, відбувається переривання в рішенні колишньої задачі, до якого диспетчер| або сама система повертається після виконання пріоритетніших операцій. Таке дуже спрощене уявлення про диспетчеризацію завдань дозволяє зрозуміти, що при незадовільній організації бази даних і досить завантаженій системі деякі менш пріоритетні функції можуть виконуватися нерегулярно або не виконуватися взагалі. Прагнуть так організувати базу даних, щоб усе необхідні| для вирішення цього завдання дані можна було отримати за одно звернення до пристрою (наприклад, дисковій пам'яті) з мінімальною втратою часу або за визначеною адресою оперативної пам'яті.
Розставляння пріоритетів, що виконується при генерації і наладці системи, дуже важливе. Наприклад, високий пріоритет присвоюється завданням аварійної сигналізації, системам НЦУ і ППИ і підсистемам діалоги|, щоб оператор не був вимушений чекати відповіді на запит більше 2-3 з, що іноді трапляються на практиці.
Менші пріоритети привласнюються завданням видачі режимного листа, розрахунку матеріального балансу і технико-економічних показників, обчислення непрямих параметрів по моделі, оптимізаційним завданням і т.| п.
Для більшості інформаційних систем не слід занадто часто проводити опитування усіх параметрів, оскільки це завдання має досить високий пріоритет і при великому об'ємі інформації займає багато машинного часу.
Зазвичай усі параметри по частоті опитування розбиваються на групи: найчастіше опитуються відповідальні і швидкозмінюючихся| параметрів, наприклад датчики витрати (приблизно кожні 3 с), рідше — системі виміру тиску і рівня (через 6 с), ще рідше — системи контролю температури| (приблизно кожні 15 с), і зовсім рідко — системи виміру фізико-хімічних величин| і параметрів ручного введення (наприклад, лабораторного аналізу — один раз в хвилину).
Сервісні підсистеми повинні забезпечувати|:
тестування облаштувань УВК, модулів і каналів УСО;
перевірку програмного забезпечення по контрольних прикладах і завданнях; підготовку|, завантаження, трансляцію, редагування, генерацію і відладку системи;
можливість модифікації програмного| забезпечення при поліпшенні характе-ристик| системи або при її тиражуванні.
При пуско-налагоджувальних роботах сервісні підсистеми мають дуже велике значення, оскільки вони визначають наладкопригодність| системи, дозволяють значно прискорити процес відладки, локалізації помилок як в програмах, так і в пристроях.
Необхідно відмітити, що навіть в АСУ ТП середньої потужності (декілька сотень вхідних сигналів) процес відладки системи на об'єкті надзвичайно складний і важливий.
При ненормальній роботі системи передусім виникає питання: де трапилося порушення — в апаратурі або в програмі?
За допомогою стандартних тестів і контрольних| завдань виявляється загальна работоздібності технічних засобів. Проте деякі апаратурні неполадки виявляются| тільки при роботі усієї АСУ ТП. В той же час програмні засоби також перевіряються неповністю. Відомі випадки, коли виявлялися помилки в пакетах багато-кратно тиражованих програм. При цьому йдеться не про помилки, викликаних поширенням програм, а про неперевірені гілки алгоритмів, працюючих в рідкісних ситуаціях.
Особливо трудомістке виявлення таких помилок, що рідко повторюються, в системах реального часу, коли несправність може виникати один раз в добу або навіть рідше; проаналізувати причини її появлення надзвичайно складно.
Як правило, пуско-налагоджувальні организації| враховують важливість цих підсистем і не обмежуються використанням стандартних| підсистем, а постійно їх розвивають і удосконалюють. Зокрема, великій модернізації піддаються програми -відладчики|, які використовуються в режимі реального часу і включаються як черінь-система відладки в пакет при генерації програмного забезпечення.
Література: Л. 11. с. 39-43.
Контрольні питання:
Як відбувається наладка підсистеми первинної переробки інформації?
Що таке наладка діалогової підсистеми?
Для чого потрібна наладка підсистеми організації і доступу до бази даних, диспетчеризації завдань?
Як робиться наладка сервісних підсистем?
Самостійна робота : Наладка сервісних підсистем.
Монтаж та налагодження технічних засобів автоматизованих систем
ЛЕКЦІЯ 48.
Тема: «Наладка оптоелектронних систем автоматизації.»
ПЛАН ЛЕКЦІЇ
Побудова оптоелектронних систем автоматизації.
Принцип дії волоконних світлопроводів.
Спеціалізована контрольно-вимірювальна апаратура для контролю параметрів волоконно-оптичних ліній зв'язку.
Контрольні питання.
Самостійна робота.
Література.
Викладач О.Л.Климаш
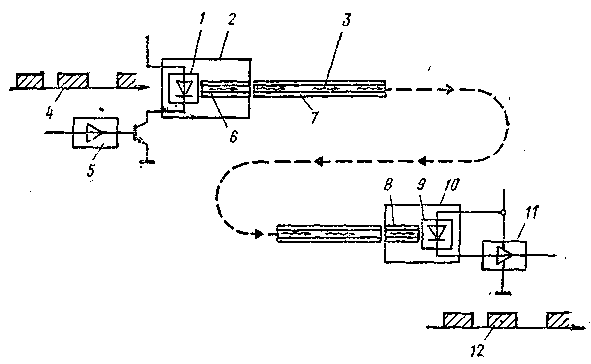
Побудова волоконно-оптичних систем передачі (ВОСП) світлових випромінювань заснована на волоконно-оптичному способі передання інформації, що полягає в пері-дачі модульованого світлового потоку по спеціальному світлопроводящему| каналу (оптичному хвилеводу). Його технічна реалізація здійснюється за допомогою трьох основних компонентів: випромінювача модульованого світлового потоку; хвилеводного світлопроводящемго | тракту і фотоприймального перетворювача. Принципи-альная структурна схема простої ВОСП приведена на рис 1.
В якості випромінювачів модульованого світлового потоку в промислових волоконно-оптичних системах широко поширено два типи напівпровідникових приладів : інжекційні лазери безперервного випромінювання і світловипромініючі| діоди інфрачервоного диапазону|. Лазерні випромінювачі застосовуються на лініях великої протяжності і при надвисоких швидкостях передачі; світловипромініючі | діоди, дешевші, надійніші і довговічніші, застосовуються в численних ВОСП протяжністю 10 — 15 км з проміжним підсилювачем сигналів при швидкостях передачі до 34 Мбіт/с.
 світлові
промені зазнають
повне внутрішнє віддзеркалення і
розповсюджуються
| уздовж
серцевини з невеликими втратами енергії,
обумовленими розсіянням світла в
матеріалі самої
серцевини.
світлові
промені зазнають
повне внутрішнє віддзеркалення і
розповсюджуються
| уздовж
серцевини з невеликими втратами енергії,
обумовленими розсіянням світла в
матеріалі самої
серцевини.
Конструкція волоконного світлопровода на основі ккварцевого| оптичного волокна показана на мал. 91. У поперечному перерізі кварцевое| волокно представляє| собою дві концентрично розташовані облості| з легованого кварцу з різними показниками коефіцієнта заломлення. Центральна область — серцевина волоконного світлопровода — має більше високий| коефіцієнт заломлення і служить для безпосередньоїпередачі по ньому світловій енергії. Зовнішня область — відбиваюча оболонка волоконного світловода| — має менший коефіцієнт заломлення. Границя розділу між серцевиною і оболонкою утворює відбиваючий шар, завдяки якому усі введені в серцевину під певним кутом
Рис.1. Принципова схема ВОСП з нескладною структурою волоконно-оптичних ліній зв'язку.
1 — кристал напівпровідникового випромінювача; 2 — передавальний оптоелектронний модуль; 3 — світлові імпульси в серцевині волоконного| світлопровода : 4 — електричні сигнали на виході передавального модуля|; 5 -підсилювач| електричних сигналів; 6, 8 — оптичний пристрій, що согласуюче|; 7 — волоконний світлопровід; 9 — кристал полупро-водникового| фотоприймача; 10 — приймальний оптоелектронний модуль; 11 -вихідний| підсилювач електричних сигналів; 12 — електричні сигнали на виході приймального модуля.
Для підвищення механічної міцності волоконний світлопровід покривають полімерними оболонкою|, після чого укладають в кабельну конструкцію|, придатну для прокладення. Передана по волоконному світлопроводу світлова энергія| має бути прийнята і знову перетворена в электричну| форму для подальшого дешифрування прийнятої двійкової інформації в початковий вид. Таке перетворення виконується фотоприймальнями перетворювача|, в якості яких широко застосовують різні фотодіоди, провідність яких визначається числом фотонів світла, поглинених активною областю| напівпровідникового переходу діодною структури.|
Окрім трьох основних компонентів ВОСП информації|, до складу ВОЛС входять допоміжні компоненти| різного функціонального призначення : оптичніз'єднувачі, відгалужувачі, розгалужувачі, перемикачі і інші вироби.
Світлопроводи відносяться до направляючих систем передачі| інформації і займають найвищу смугу використовуємого частотного діапазону. По світлопроводах поширюються| хвилі завдовжки меншою, ніж діаметр сердечника| світлопровода.
Нині найпоширенішим способом| модуляції світлового потоку є керування струмом інжекції напівпровідникових випромінювачів. У струмовий ланцюг випромінювача подається серія струмових імпульсів|, кожен з яких відповідає значенню «I»| в двійковій формі представлення інформації, чередуючихся з безтоковими| паузами, відповідними значенню «0». При протіканні струмового імпульсу в полупроводникових| переходах випромінювача (світлодіода або лазера) відбуваються фізичні процеси, що супроводжуються випромінюванням світлових імпульсів такої ж тривалості, яку мають струмові імпульси, надані на випромінювач. Світловий потік від випромінювача оптичними| пристроями фокусується на торець серцевини оптичного волокна.
Основою волоконно-оптичних систем передачі інформації| є оптичний хвилевід, в якості якого| використовується волоконний світлопровід, що представляє| собою оптичне волокно складної в поперечному перетину конструкції, виготовлене з легованого кварцу, оптичного скла або полімерних матеріалів. Прості оптичні світлопроводи — ступінчасті двокомпонентні конструкції, прикладами яких можуть служити кварцеві| або кварц-полимерные| оптичніволокна, що спочатку отримали широке поширення із-за порівняльної простоти технології їх виготовлення.
У поперечному перерізі кварц-кварцеве| волокно складається з двох концентрично розташованих областей з легованого кварцу з різними коефіцієнтами заломлення. Центральна область, звана сердцевиної| волоконного світлопровода, має вищий коэффіціент| заломлення і служить для безпосередньої передачі по ньому світловій енергії. Зовнішня область, що називається відбиваючою оболонкою волоконного світловода|, має менший показник коефіцієнта переломлення|. Межа розділу між серцевиною і оболонкою утворює відбиваючий шар, завдяки якому усе введені| в серцевину під певним кутом світлові промені зазнають повне внутрішнє віддзеркалення і поширюються уздовж серцевини з невеликими втратами енергії, обумовленими розсіянням світла в матеріалі самої серцевини.
Передача світлової енергії по волоконному світлопроводу підкоряється законам передачі електромагнітної энергії по діелектричних хвилеводах, і геометричні розміри елементів волоконних світлопроводів визначаються умовами дії цих законів для оптичного диапазона| електромагнітних коливань.
Для контролю параметрів і виміру середнього значення потужності оптичноговипромінювання активних елементів ВОЛС і коэффіцієнта| передачі їх пасивних елементів застосовують прилади: генератор сигналів оптичний; ватметр потужності, що поглинається; тестер оптичний.
Для виміру загасання оптичних пристроїв|, що вноситься, в польових умовах застосовують вимірників затухання|, а також джерел випромінювання і вимірник оптичної потужності.
Для виявлення дефекту (обриву) ОВ і ОКИ використовують індикатор обриву волокна в технологічному процесі, комплект приладів для виявлення несправностей, оптичний передавач, оптичних| конвертор і оптичну приставку.
Для контролю якості обробки торців ОВ використовують інтерферометр.
Література: Л. 19.
Контрольні питання:
Для чого потрібні оптоелектронні системи автоматизації?
Який принцип дії волоконних світлопроводів?
Для чого побрідна спеціалізована контрольно-вимірювальна апаратура?
Самостійна робота: Спеціалізована контрольно-вимірювальна апаратура для контролю параметрів волоконно-оптичних ліній зв'язку.
Монтаж та налагодження технічних засобів автоматизованих систем
ЛЕКЦІЯ 49.
Тема: «Наладка датчиків за допомогою HART -модема.»
ПЛАН ЛЕКЦІЇ
Перетворення сигналів HART в сигнали інтерфейсу RS232.
Модем HART/RS232.
Встановлення зв'язку з персональним комп'ютером.
Контрольні питання.
Самостійна робота.
Література.
Викладач О.Л.Климаш
Стандарт для передачі аналогових сигналів значеннями струму в діапазоні
4-20 мА відомий вже декілька десятків років і широко використовується при створенні систем АСУ ТП, в хімічній індустрії, теплоенергетиці, в харчовій і багатьох інших галузях промисловості. Традиційно для виміру різних фізичних величин (тиску, об'єму, температури і так далі) пропонується безліч приладів із струмовим виходом 4-20 мА. Гідністю цього стандарту є простота його реалізації, масове використання в приладах і можливість завадостійкої передачі аналогового сигналу на відносно великі відстані.
Проте при створенні нового покоління інтелектуальних приладів і датчиків потрібно було разом з передачею аналогової інформації передавати і цифрові дані, що відповідають їх новим розширеним функціональним можливостям.
Протокол HART - широко відомий промисловий стандарт для удосконалення струмової петлі 4-20 мА до можливості цифрової комунікації. Використання цієї технології швидко росте, оскільки Замовники вже оцінили переваги інтелектуального устаткування. Протокол HART дозволяє передавати одночасно аналоговий і цифровий сигнал по одній і тій же парі дротів. При цьому зберігається повна сумісність і надійність існуючих аналогових ліній 4-20 мА. Протокол HART - широко відомий промисловий стандарт для удосконалення струмової петлі 4-20 мА до можливості цифрової комунікації. Використання цієї технології швидко росте, оскільки Замовники вже оцінили переваги інтелектуального устаткування. Протокол HART дозволяє передавати одночасно аналоговий і цифровий сигнал по одній і тій же парі дротів. При цьому зберігається повна сумісність і надійність існуючих аналогових ліній 4-20 мА.
HART протокол використовує принцип частотної модуляції для обміну даними на швидкості 1200 Бод. Схема, що пояснює роботу приладів по HART протоколу, представлена на рис.1.
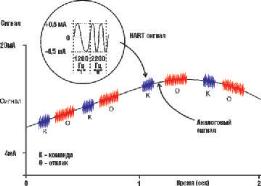
Рис.1 Принцип обміну даними по HART -протоколу
Для передачі логічної "1" HART використовує один повний період частоти 1200 Гц, а для передачі логічного "0" - два неповні періоди 2200 Гц.
Як видно на малюнку, HART складова накладається на струмову петлю 4-20 мА. Оскільки середнє значення синусоїди за період дорівнює "0", то HART сигнал ніяк не впливає на аналоговий сигнал 4-20 мА.
HART протокол побудований за принципом "головний - підлеглий", тобто польовий пристрій відповідає за запитом системи. Протокол допускає наявність двох керівників пристроїв (система, що управляє, і комунікатор).
Існує два режими роботи датчиків, що підтримують обмін даними по HART протоколу.
Режим передачі цифрової інформації одночасно з аналоговим сигналом представлений на рис.2. Зазвичай в цьому режимі датчик працює в аналогових АСОВІ ТП, а обмін по HART -протоколу здійснюється за допомогою HART комунікатора або комп'ютера. При цьому можна видалено (відстань до 3000 м) здійснювати повне налаштування і конфігурацію датчика. Тепер операторові немає необхідності обходити усі датчики на підприємстві, він може їх настроїти безпосередньо зі свого робочого місця.

Рис.2 Режим передачі цифрової інформації одночасно з аналоговим сигналом
У багатоточковому режимі (рис.3) датчик передає і отримує інформацію тільки в цифровому виді. Аналоговий вихід автоматично фіксується на мінімальному значенні (тільки живлення пристрою - 4 мА) і не містить информацииоб вимірюваній величині. Інформація про змінні процесу прочитується поHARTпротоколу.
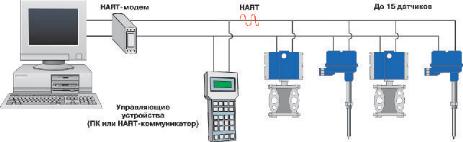
Рис.3 Багатоточковий режим роботи датчиків
До однієї пари дротів може бути підключені до 15 датчиків. Їх кількість визначається завдовжки і якістю лінії, а так само потужністю блоку живлення датчиків. Усі датчики у багатоточковому режимі мають свою унікальну адресу від 1 до 15, і звернення до кожного йде за відповідною адресою. Комунікатор або система управління визначає усі датчики, підключені до лінії, і може працювати з будь-яким з них.
НАRТ - USB модем Метран-682 (далі модем) призначений для зв'язку персонального комп'ютера або системних засобів АСУТП з будь-якими інтелектуальними пристроями (датчиками тиску, перетворювачами температури, витрати та ін.), підтримувальними НАRТ -протокол. Основні достоїнства модему :
забезпечує високу надійність прийому/передачі даних;
не вимагає застосування блоку живлення;
має два світлові індикатори (живлення і інформаційний обмін);
має малі розміри і зручний у використанні;
забезпечує можливість налаштування підключених HART--пристроїв з будь-якої точки струмового ланцюга;
може застосовуватися з різним програмним забезпеченням (AMS Device Manager, HART - Master, HART OPC -сервер, Rosemount Radar Master, Radar configuration tools, Engineering assistant, Visual Instrument і т. д.).
HART модем Метран-681 призначений для зв'язку персонального комп'ютера або системних засобів АСУТП з будь-якими інтелектуальними польовими приладами (датчиками тиску, перетворювачами температури, витрати і тому подібне), підтримувальними HART -протокол. Основні достоїнства модему :
забезпечує високу надійність прийому передачі даних;
не вимагає застосування блоку живлення;
забезпечує можливість налаштування підключених HART -пристроїв з будь-якої точки струмового ланцюга;
використовується з програмами HART - Master, HART ОРС-сервер або з будь-яким іншим програмним забезпеченням (AMS Device Manager, Rosemount Radar Master, Radar Configuration Tools, Engineering Assistant, Visual Instrument і так далі) для налаштування інтелектуальних пристроїв з HART -протоколом.
Конфігураційна програма HART - Master призначена для налаштування інтелектуальних датчиків тиску Метран-150, Метран-100, Метран-49, Rosemount 3051С/T, Rosemount 3051S, Rosemount 1151 інтелектуальних перетворювачів температури Метран-280, Rosemount 248, перетворювачів витрати Метран-300ПР, Метран-303ПР, Метран-305ПР і інших пристроїв, підтримувальних HART -протокол. Для роботи програми з датчиками потрібний HART -модем (наприклад, Метран-681, Метран-682) або HART -мультиплексор Метран-670. Програма має зручний інтерфейс користувача на росіянинові і англійському мовах. HART - Master дозволяє виконати:
пошук пристроїв, підключених до HART -модему або до HART -входам мультиплексора;
пошук пристроїв, що підключених по інтерфейсу RS485 і підтримують канальний рівень HART;
зчитування змінних процесу;
зчитування інформації про HART -устройстве і сенсорі;
тест пристрою;
налаштування HART -датчика;
калібрування сенсора датчиків;
налаштування ЦАП;
архівація параметрів.
Література: Л. 19.
Контрольні питання:
Для чого потрібен модем HART/RS232?
Як робиться налагодження зв'язку з персональним комп'ютером?
Самостійна робота : Встановлення зв'язку з персональним комп'ютером.
Монтаж та налагодження технічних засобів автоматизованих систем
ЛЕКЦІЯ 50.
Тема: «Наладка датчиків за допомогою HART - комунікатора.»
ПЛАН ЛЕКЦІЇ
Пристрій для зв'язку з датчиком по цифровому каналу.
Обмін даними по HART - протоколу.
Контрольні питання.
Самостійна робота.
Література.
Викладач О.Л.Климаш
ЯКЩО ВАМ НЕОБХІДНО:
Перенастроювати діапазон приладу
Підлаштовувати нуль
Виявляти причини несправності приладу або лінії зв'язку
Читати номер приладу, дату його останнього калібрування і інші параметри
Робити калібрування сенсора
Здійснювати налаштування приладів з диспетчерської
Отримувати оперативну інформацію про стан приладів
Здійснювати постійний контроль параметрів
Створювати архіви процесу
ВИКОРИСТОВУЙТЕ HART -коммунікатор.

HART -коммунікатор — цей портативний пристрій, призначений для cчитывания інформації, видаленого налаштування і конфігурації інтелектуальних польових приладів c HART -протоколом.
Особливо необхідно відмітити велику зручність наявності цифрового зв'язку з приладами. Навіть, якщо датчики розташовані у важкодоступних місцях, то за допомогою HART -коммунікатора можна легко робити їх видалене налаштування. При цьому технічний персонал отримує необхідну діагностичну інформацію від польових приладів на HART -коммунікатор, а це дозволяє передбачити виникнення несправностей і знижує простої устаткування.
Наприклад, комунікатор Метран-650 — цей портативний пристрій, призначений для считування інформації, видаленого налаштування і конфігурації інтелектуальних польових приладів c HART -протоколом, зовнішній вигляд якого показаний на рис. 1.

Рис. 1. Комунікатор Метран-650.
Основні достоїнства комунікатора Метран-650:
- можливість налаштування довільних HART -приладів з будь-якої точки струмового ланцюга;
- доступ до усіх параметрів приладів;
- діагностика приладу;
- отримання інформації про пристрій (номер приладу, версія приладу і так далі);
- сумісність з облаштуваннями HART;
- наявність вибухозахищеного виконання : вид вибухозахисту "іскробезпечний електричний ланцюг" (маркіровка вибухозахисту 0ExiaIICT5 X);
- обслуговування по HART до 15 пристроїв, приєднаних до однієї лінії;
- автономне джерело живлення — блок акумуляторів, що перезаряджаються, або замінювані лужні батареї;
- інтерфейс користувача на росіянинові або англійському мовах;
- комунікатор не є засобом вимірів і не вносить додаткової погрішності в аналоговий вимірювальний сигнал;
- для правильного функціонування комунікатора опір ланцюга має бути не менше 250 Ом.
Комунікатор може працювати від одного з двух джерел живлення:
- блоку акумуляторів, що перезаряджаються;
- зовнішнього джерела живлення.
Комунікатор поставляється також з блоком акумуляторів, що перезаряджаються, в комплекті із зовнішнім джерелом живлення.
Вихідна напруга блоку акумуляторів при повній зарядці не більше 6 і не менше 4,4 В.
Електрична місткість блоку акумуляторів не менше 650 мА/г. Комунікатор забезпечує безперервну роботу не менше 8 г. без перезарядки блоку акумуляторів.
Комунікатор забезпечує:
- вимір напруги живлення з індикацією результату на ЖКИ;
- автоматичний контроль напруги живлення і індикацію розрядженого стану автономного джерела живлення;
- зарядку блоку акумуляторів і одночасну роботу при підключенні зовнішнього джерела живлення з комплекту постачання (тільки при роботі у вибухобезпечній зоні).
Комунікатор Метран-650 повністю підтримує роботу з наступними HARTAприладами:
- інтелектуальні датчики тиску Метран-150, Метран-100, Метран-150R, Метран-49;
- інтелектуальні датчики тиску Rosemount 3051C/T/G, Rosemount 3051S, Rosemount 2051, Rosemount 2051LP, Rosemount 1151, Rosemount 2088;
- інтелектуальні перетворювачі температури Метран-280, Rosemount 248, Rosemount 644;
- інтелектуальний перетворювач витрати Метран-300ПР, Метран-303ПР, Метран-305ПР;
- витратоміри Micro Motion і Метран-360 з перетворювачем MVD1700/2700.
Ці HART -прилади обслуговуються в повному об'ємі універсальних, загальних і спеціальних команд і управляються по індивідуальних алгоритмах роботи комунікатора.
Усе інші HART -сумісні прилади обслуговуються комунікатором по алгоритму роботи комунікатора при управлінні довільним HART -пристроєм. В цьому випадку комунікатор Метран-650 забезпечує виконання універсальних і загальних команд HART -приладів.
На рис. 1 показано підключення комунікатора Метран-650 при роботі з одним датчиком.
На рис. 2 показано підключення комунікатора Метран-650 при роботі з декількома датчиками.
Рис. 1. Підключення комунікатора Метран-650 при роботі з одним датчиком.
Рис. 2. Підключення комунікатора Метран-650 при роботі з декількома датчика.
Література: Л. 19.
Контрольні питання:
Як відбувається зв'язок з датчиком по цифровому каналу?
Що таке HART – протокол? Для чого він потрібен?
Самостійна робота : Обмін даними по HART - протоколу.
Монтаж та налагодження технічних засобів автоматизованих систем
ЛЕКЦІЯ 51.
Тема: «Налагодження мережі Ethernet .»
ПЛАН ЛЕКЦІЇ
Комп’ютерні мережі.
Організація мережі Ethernet.
Контрольні питання.
Самостійна робота.
Література.
Викладач О.Л.Климаш
Під комп’ютерною мережею розуміють сукупність взаємозалежних через канали передачі даних комп’ютерів, які забезпечують користувачів засобами обміну інформацією та колективним використанням ресурсів мережі: апаратних, програмних та інформаційних.
Об’єднання комп’ютерів у мережу дає можливість сумісно використовувати багато вартісного обладнання — диски великої ємності, принтери, основну пам’ять, мати загальні програмні засоби та дані. Основним призначенням мережі є забезпечення простого, зручного та надійного доступу користувача до розподільним загально мережевим ресурсам й організація їх колективного використання при надійному захисті від несанкціонованого доступу, а також забезпечення зручних і надійних засобів передачі даних між користувачами мережі.
По призначенню комп’ютерні мережі розподіляються на обчислювальні, інформаційні, змішані.
Обчислювальні мережі призначені головним образом для вирішення завдань користувачів з обміном даних між їх абонентами.
Інформаційні мережі орієнтовані в основному на представлення інформаційних послуг користувачам.
Змішані мережі поєднують функції перших двох.
В основному комп’ютерні мережі класифікують по признакам структурної та функціональної організації.
По територіальній розповсюдженості.
- PAN (Personal Area Network) — персональна мережа, призначена для взаємодії різноманітних пристроїв, які належать одному власнику.
- LAN (Local Area Network) — локальні мережі, котрі мають замкнуту інфраструктуру до виходу на постачальників послуг. Термін «LAN» може описувати і маленьку офісну мережу, і мережу рівня великого заводу, який займає декілька сотень гектар. Зарубіжні джерела дають навіть близьку оцінку – біля шести миль (10 км) у радіусі. Локальні мережі є мережами закритого типу, доступ до них дозволено лише обмеженому колу користувачів, для яких робота у такій мережі безпосередньо пов’язана з їх професійною діяльністю.
- CAN (Campus Area Network — кампусна мережа) — поєднує локальні мережі близько розташованих споруд.
- MAN (Metropolitan Area Network) — міські мережі між установами в межах одного чи декількох міст, які поєднують багато локальних обчислювальних мереж.
- WAN (Wide Area Network) — глобальна мережа, яка покриває великі географічні регіони, які включають у себе як локальні мережі, так й інші телекомунікаційні мережі та пристрої. Наприклад WAN — мережі с комунікацією пакетів (Frame relay), через котру можуть «балакати» між собою різноманітні комп’ютерні мережі. Глобальні мережі є відкритими та орієнтовані на обслуговування любих користувачів.
По типу функціональної взаємодії.
- Клієнт-сервер.
- Змішана мережа.
- Однорангова мережа.
- Багаторангова мережа.
По типу мережевої топології.
- Шина.
- Коло.
- Двойне коло.
- Зірка.
- Ячеїста топологія.
- Решітка.
- Дерево.
- Fat Tree.
По типу середовища передачі.
- Провідні (телефонний провід, коаксіальний кабель, вита пара, волоконно-оптичний кабель).
- Безпровідні (передачею інформації по радіохвилям у визначеному частотному діапазоні).
По функціональному призначенню.
- Мережі зберігання даних.
- Серверні ферми.
- Мережі керування процесом.
- Мережі SOHO & Домова мережа.
По швидкості передачі.
- Низькошвидкісні (до 10 Мбіт/с).
- Середньошвидкісні (до 100 Мбіт/с).
- високошвидкісні (вище 100 Мбіт/с).
По мережевим ОС.
- На основі Windows.
- На основі UNIX.
- На основі NetWare.
По необхідності підтримки постійного з’єднання.
- Пакетна мережа, наприклад Фідонет и UUCP.
- Онлайнова мережа, наприклад Інтернет та GSM.
Стеки протоколів
При реалізації комп’ютерної мережі можуть використовуватися різноманітні набори протоколів. Нище наведені деякі з них:
- AppleTalk.
- ARCNETю
- ATM.
- DECnet.
- Ethernet.
- IEEE-488.
- IP.
- IPX.
- TCP.
Локальні обчислювальні мережі, в залежності від засобів взаємодії комп’ютерів в них, можна розділити на централізовані та однорангові мережі. Централізовані локальні мережі будуються на основі архітектури "клиєнт-сервер", яка предполагає виділення у мережі "серверів" і "клієнтів". Однорангові ЛОМ основані на рівноправній (peer-to-peer) моделі взаємодії комп’ютерів, у якій кожен комп’ютер може бути як сервером, так і клієнтом.
Локальні обчислювальні мережі можуть відрізнятися архітектурою (Ethernet, Token Ring, FDDI та ін.) та топологією (шинна, кільцева, “зірка”). Вибор типу ЛОМ залежить від потреби користувачів та фінансових можливостей підприємства.
Мережеві технології локальних мереж IEEE802.3/Ethernet.
У теперішній час ця мережева технологія найбільш популярна у світі. Популярність забезпечується простими, надійними та недорогими технологіями. У класичній локальній мережі Ethernet застосовується стандартний коаксіальний кабель двох видів (товстий та тонкий).
Однак ще більше розповсюдження отримала версія Ethernet, яка використовує у якості середовища передачі виті пари, тому що монтаж й обслуговування їх набагато легше. У локальних мережах Ethernet застосовують топології типу “шина” та типу “пасивна зірка”, а метод доступуCSMA/CD.
Стандарт IEEE802.3 у залежності від типу середовища передачі даних має модифікації:
10BASE5 (товстий коаксіальний кабель) — забезпечує швидкість передачі даних 10 Мбіт/с та довжину сегмента до 500 м;
10BASE2 (тонкий коаксіальний кабель) — забезпечує швидкість передачі даних 10 Мбіт/с та довжину сегмента до 200 м;
10BASE — T (неекранована вита пара) — дозволяє створювати мережу по зоряній топології. Відстань від концентратора до кінцевого вузла до 100 м. Загальна кількість вузлів не повинна перевищувати 1024;
10BASE — F (оптоволоконний кабель) — дозволяє створювати мережу по зоряній топології. Відстань від концентратора до кінцевого вузла до 2000 м.
У розвиток мережевої технології Ethernet створені високошвидкісні варіанти: IEEE802.3u/Fast Ethernet і IEEE802.3z/Gigabit Ethernet. Основна топологія, яка використовується в локальних мережах Fast Ethernet і Gigabit Ethernet, пасивна зірка.
Мережева технологія Fast Ethernet забезпечує швидкість передачі 100 Мбіт/с і має три модифікації:
100BASE — T4 — використовується неекранована вита пара (счетверенна вита пара). Відстань від концентратора до кінцевого вузла до 100м;
100BASE — TX — використовуються дві виті пари (неекранована і екранована). Відстань від концентратора до кінцевого вузла до 100м;
100BASE — FX — використовується оптоволоконний кабель (два волокна в кабелі). Відстань від концентратора до кінцевого вузла до 2000м; .
Мережева технологія локальних мереж Gigabit Ethernet - забезпечує швидкість передачі 1000 Мбіт/с. Існують наступні модифікації стандарту :
1000BASE - SX - застосовується оптоволоконний кабель з довжиною хвилі світлового сигналу 850 нм.
1000BASE - LX - використовується оптоволоконний кабель з довжиною хвилі світлового сигналу 1300 нм.
1000BASE - CX - використовується екранована вита пара.
1000BASE - T - застосовується счетверенная неекранована вита пара.
Локальні мережі Fast Ethernet та Gigabit Ethernet сумісні з локальними мережами, виконаними за технологією (стандарту) Ethernet, тому легко і просто сполучати сегменти Ethernet, Fast Ethernet і Gigabit Ethernet в єдину обчислювальну мережу.
Мережі з шинною топологією (мал. 1) використовують лінійний моноканал (коаксіальний кабель) передачі даних, на кінцях якого встановлюються крайові опори (терминаторы). Кожен комп'ютер підключається до коаксіального кабелю за допомогою Т-роз'єму (Т - коннектор). Дані від передавального вузла мережі передаються по шині в обидві сторони, відбиваючись від крайових терминаторов. Терминаторы запобігають віддзеркаленню сигналів, тобто використовуються для гасіння сигналів, які досягають кінців каналу передачі даних. Таким чином, інформація поступає на усі вузли, але приймається тільки тим вузлом, якому вона призначається. У топології логічна шина середовище передачі даних використовуються спільно і одночасно усіма ПК мережі, а сигнали від ПК поширюються одночасно в усі напрями по середовищу передачі. Оскільки передача сигналів в топології фізична шина є широкомовною, тобто сигнали поширюються одночасно в усі напрями, то логічна топологія цієї локальної мережі є логічною шиною.

Мал. 1. Локальна мережа з шинною топологією.
Ця топологія застосовується в локальних мережах з архітектурою Ethernet (класи 10Base-5 і 10Base-2 для товстого і тонкого коаксіального кабелю відповідно).
Переваги мереж шинної топології :
- відмова одного з вузлів не впливає на роботу мережі в цілому;
- мережу легко настроювати і конфігурувати;
- мережа стійка до несправностей окремих вузлів.
Недоліки мереж шинної топології :
- розрив кабелю може вплинути на роботу усієї мережі;
- обмежена довжина кабелю і кількість робочих станцій;
- важко визначити дефекти з'єднань
У мережі побудованої по топології типу "зірка" кожна робоча станція під'єднується кабелем (витою парою) до концентратора або хабу (hub). Концентратор забезпечує паралельне з'єднання ПК і, таким чином, усі комп'ютери, підключені до мережі, можуть спілкуватися один з одним.
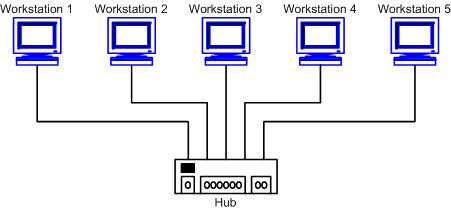
Мал. 2. Локальна мережа типу "зірка".
Дані від передавальної станції мережі передаються через хаб по усіх лініях зв'язку усім ПК. Інформація поступає на усі робочі станції, але приймається тільки тими станціями, яким вона призначається. Оскільки передача сигналів в топології фізична зірка є широкомовною, тобто сигнали від ПК поширюються одночасно в усі напрями, то логічна топологія цієї локальної мережі є логічною шиною.
Ця топологія застосовується в локальних мережах з архітектурою 10Base - T Ethernet.
Переваги мереж топології зірка:
- легко підключити новий ПК;
- є можливість централізованого управління;
- мережа стійка до несправностей окремих ПК і до розривів з'єднання окремих ПК.
Недоліки мереж топології зірка:
- відмова хаба впливає на роботу усієї мережі;
- велика витрата кабелю.
Література: Л. 20. с. 6 — 11; 13- 15. Л. 21. с. 418 — 430.
Контрольні питання:
Для чого потрібні комп’ютерні мережі?
Що таке Ethernet? Для чого він потрібен?
Самостійна робота : Організація мережі Ethernet.