

2
1.18. Потери из-за рассеивания са
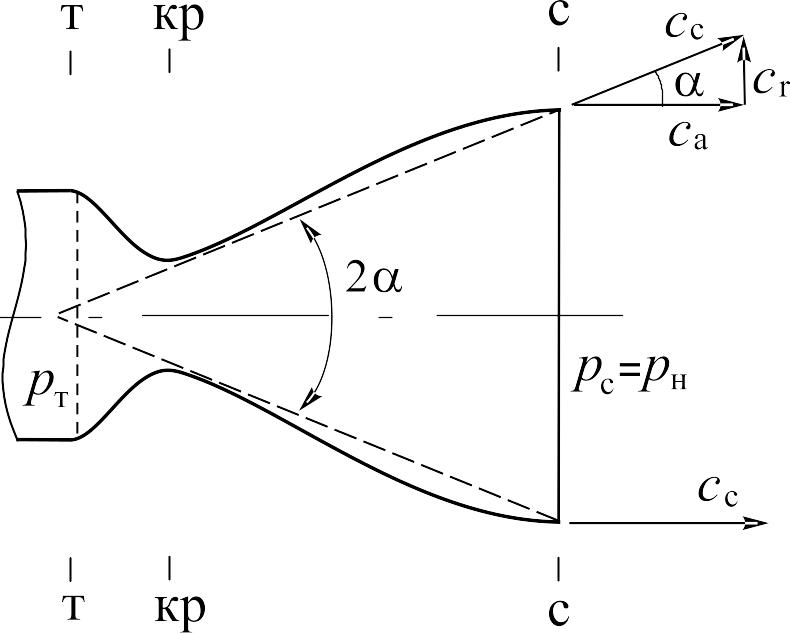
. Потери, связанные с рассеиванием
выходной скорости (для конических
каналов) (рис. 9.2), где 2α – угол раствора;
са.ср
= ссφрас
– средняя осевая составляющая скорости.
Величина
коэффициента рассеивания –
![]() зависит от угла α и определяется по
табл. 1.2.
зависит от угла α и определяется по
табл. 1.2.
При увеличении угла α, следовательно, уменьшении φрас, снижается са.ср (при сс = const)
При проектировании РС рекомендуется выбирать значения угла α ≤ 25…30о
Таблица 1.2
α, град |
0 |
5 |
10 |
20 |
φрас |
1,0 |
0,998 |
0,992 |
0,97 |
3. Волновые потери (φволн) возникают в сверхзвуковой (расширяющейся) части РС из-за появления скачков уплотнения при неравномерном входе потока.
Для уменьшения волновых потерь переход между дозвуковой и сверхзвуковой частями РС делают плавным (по дуге с большим радиусом) (см. рис. 1.18).
4. Потери, связанные с неравномерностью поля давлений по сечению сопла (φр).
5. Тепловые потери, связанные с теплоотдачей через стенки сопла (φтепл).
Суммарные внутренние потери сверхзвукового РС φс определяются как произведение:
φс = φтр φрас φволн φр φтепл. (1.20)
Потери, связанные с нерасчетностью режима работы РС
Этот вид потерь оценивается при помощи коэффициента нерасчетности режима работы сопла:
![]() ,
(1.21)
,
(1.21)
где Rc = Мгсс + Fс(рс – рн) – тяга сопла;
Rс.п = Мгсс – тяга сопла при полном расширении (расчетный режим).
На
расчетном режиме
![]() =
1, так как Rc
= Rс.п.
=
1, так как Rc
= Rс.п.
Для
оценки суммарных потерь (φс
и
![]() )
вводят комплексный критерий – коэффициент
тяги сопла:
)
вводят комплексный критерий – коэффициент
тяги сопла:
![]() ,
(1.22)
,
(1.22)
где Rс.ид – тяга идеального сопла (полное расширение = 1 и отсутствие внутренних потерь φс = 1).
В общем случае
![]() .
(1.23)
.
(1.23)
На
расчетном режиме
![]() ,
так как
,
так как
![]() .
.
Потери, связанные с преодолением внешнего сопротивления ВУ.
Этот вид потерь оценивается с помощью коэффициента внешнего сопротивления ВУ:
![]() ,
(1.24)
,
(1.24)
где Хс – суммарное внешнее сопротивление РС или ВУ в целом.
Наличие внешнего сопротивления ВУ Хс вызвано взаимодействием внешнего потока, обтекающего ВУ, и струи газов, истекающей из РС, а также аэродинамическим сопротивлением и зависит от числа М полета, полной степени расширения газа в РС и формы наружного контура кормовой части ВУ.
Суммарные потери в ВУ оценивают с помощью коэффициента эффективной тяги РС:
![]() .
(1.25)
.
(1.25)
Характеристики реактивного сопла (хрс)
ХРС
– это зависимости коэффициента
эффективной тяги сопла
![]() от полной степени расширения газа в РС
и числа М внешнего потока
от полной степени расширения газа в РС
и числа М внешнего потока
![]() .
.
Характеристики
РС снимают на стенде при М = 0. В
этом случае
![]() ,
так как при М = 0,
,
так как при М = 0,
![]() .
.
Принимая
допущение, что по длине РС – кг = const,
Rг = const,
рассмотрим характеристику
![]() при условии что:
при условии что:
![]() = 2,5;
= 2,5;
![]() =
15 (рис. 1.19).
=
15 (рис. 1.19).
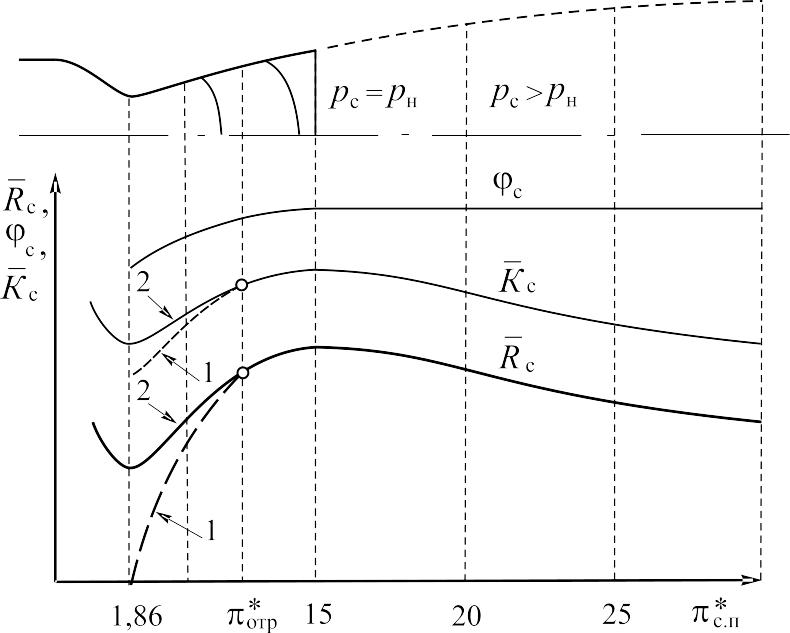
Рис. 1.19. Характеристика сверхзвукового РС
При
= 15 = πс.расп
– расчетный режим,
![]() .
.
При
![]() >
15
>
15
![]() режим недорасширения (рс
< рн)
уменьшается
режим недорасширения (рс
< рн)
уменьшается
![]() .
.
При
![]() <
15
<
15
![]() режим перерасширения (рс
> рн)
уменьшается
режим перерасширения (рс
> рн)
уменьшается
![]() .
.
При
15 >![]() – большие потери тяги
– большие потери тяги
![]() от перерасширения вызваны уменьшением
φc
(потери в скачке за срезом сопла) и
снижением
вследствие появления отрицательной
тяги ΔRа
на участке перерасширения (см. рис. 1.16,
а).
от перерасширения вызваны уменьшением
φc
(потери в скачке за срезом сопла) и
снижением
вследствие появления отрицательной
тяги ΔRа
на участке перерасширения (см. рис. 1.16,
а).
При
![]() происходит отрыв ПС (скачок входит
внутрь сопла и движется в сторону Fкр).
Из-за наличия скачка внутри РС давление
за ним возрастает, а затем при движении
дозвукового потока по диффузорнуму
каналу давление увеличивается до
значения рн
на срезе сопла (см. рис. 1.16, б).
Это приводит к уменьшению отрицательной
тяги ΔRа
на участке перерасширения, темп снижения
замедляется (см. рис. 9.3, линия 2)
по сравнению с безотрывным перерасширением
(см. рис. 1.19, линия 1).
происходит отрыв ПС (скачок входит
внутрь сопла и движется в сторону Fкр).
Из-за наличия скачка внутри РС давление
за ним возрастает, а затем при движении
дозвукового потока по диффузорнуму
каналу давление увеличивается до
значения рн
на срезе сопла (см. рис. 1.16, б).
Это приводит к уменьшению отрицательной
тяги ΔRа
на участке перерасширения, темп снижения
замедляется (см. рис. 9.3, линия 2)
по сравнению с безотрывным перерасширением
(см. рис. 1.19, линия 1).
При
достижении скачком Fкр,
он исчезает и течение в РС становится
дозвуковым. Потери от перерасширения
становятся равны нулю
![]() ,
и
возрастает.
,
и
возрастает.
Для
поддержания
![]() необходимо подстраивать значения
необходимо подстраивать значения
![]() к значениям
к значениям
![]() ,
то есть регулировать степень расширения
сверхзвуковой части сопла, измененяя
(относительную площадь среза РС), при
изменении параметров полета и режимов
работы двигателя.
,
то есть регулировать степень расширения
сверхзвуковой части сопла, измененяя
(относительную площадь среза РС), при
изменении параметров полета и режимов
работы двигателя.