

Назначение и выбор типа рс
РС является основной частью ВУ ВРД и предназначено для преобразования части энтальпии газового потока после ГТ в кинетическую энергию струи газа, истекающей из двигателя (создание реактивной тяги).
Выбор
типа РС (дозвуковое или сверхзвуковое)
определяется в первую очередь полной
степенью расширения газа в РС –
![]() .
.
Величина
![]() зависит от типа ВРД, режима его работы
и параметров полета.
зависит от типа ВРД, режима его работы
и параметров полета.
При дозвуковых скоростях полета у ТРД и ТРДД с сужающимся РС: = 6…7 (Н ≥ 11 км); = 2,5…3,0 (Н = 0).
Максимальная тяга двигателя с сужающимся РС Rmax достигается при
(рс = рн; сс = скр),
где
 =
1,86, при кг=
1,33.
=
1,86, при кг=
1,33.
При
![]() сужающееся РС работает на режиме
недорасширения (см. рис. 1.13, б).
При незначительном превышении
>
сужающееся РС работает на режиме
недорасширения (см. рис. 1.13, б).
При незначительном превышении
>
![]() потери из-за недорасширения невелики,
поэтому выгодно применять сужающиеся
сопла, отличающиеся простой конструкцией
и малым весом.
потери из-за недорасширения невелики,
поэтому выгодно применять сужающиеся
сопла, отличающиеся простой конструкцией
и малым весом.
Сужающиеся сопла применяются при полете на дозвуковых и малых сверхзвуковых (М < 1,3) скоростях.
Так
как температура на срезе РС Тс
> Тн,
то критическая скорость истечения газа
из РС
![]() – скорости звука в атмосфере, следовательно,
на малых сверхзвуковых скоростях полета
удельная тяга
Rуд
= скр
– V
> 0, где V
= аМ,
следовательно, R
> 0, и разгон ЛА до сверхзвуковой скорости
возможен.
– скорости звука в атмосфере, следовательно,
на малых сверхзвуковых скоростях полета
удельная тяга
Rуд
= скр
– V
> 0, где V
= аМ,
следовательно, R
> 0, и разгон ЛА до сверхзвуковой скорости
возможен.
При
![]() потери из-за недорасширения в сужающемся
РС существенно возрастают и, целесообразно
применять сверхзвуковое РС (сопло
Лаваля).
потери из-за недорасширения в сужающемся
РС существенно возрастают и, целесообразно
применять сверхзвуковое РС (сопло
Лаваля).
Сверхзвуковое рс
Д
Рис.
1.17. Сверхзвуковое РС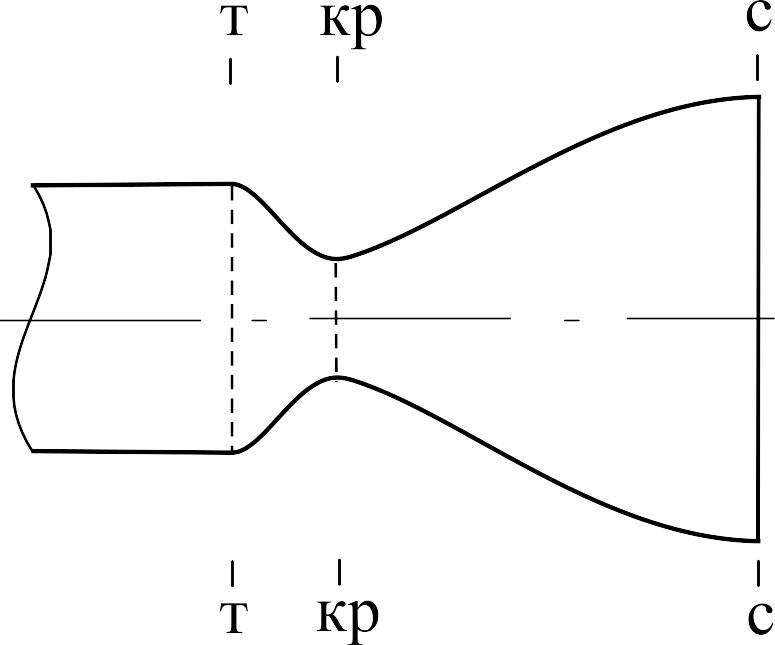
![]() ,
и сохранять при этом режим полного
расширения
,
и сохранять при этом режим полного
расширения
![]() .
Этого возможно добиться с применением
сверхзвукового РС (рис. 1.17).
.
Этого возможно добиться с применением
сверхзвукового РС (рис. 1.17).
При
![]() ,
,
![]() реализуется в сужающейся части
сверхзвукового РС. Так как
реализуется в сужающейся части
сверхзвукового РС. Так как
![]() ,
то суммарная степень понижения давления
в сопле Лаваля
,
то суммарная степень понижения давления
в сопле Лаваля
![]() будет определяться степенью понижения
давления в его сверхзвуковой (расширяющейся)
части
,
которая зависит от степени уширения
сопла:
будет определяться степенью понижения
давления в его сверхзвуковой (расширяющейся)
части
,
которая зависит от степени уширения
сопла:
![]() (1.15)
(1.15)
Максимальная
тяга Rmax
достигается при равенстве
![]() ,
соответствующем расчетному режиму
работы РС (pс
= рн).
,
соответствующем расчетному режиму
работы РС (pс
= рн).
При (pс > рн) – режим недорасширения.
При
![]() (pс
< рн)
– режим перерасширения.
(pс
< рн)
– режим перерасширения.
На нерасчетных режимах работы сверхзвукового РС:
(pс > рн) – режим недорасширения;
(pс < рн) – режим перерасширения,
имеет место недополучение тяги двигателя. Особенно большие потери тяги наблюдаются на режиме перерасширения.
Для
поддержания расчетного режима (pс
= рн)
необходимо регулировать величину
![]() (Fкр,
Fc)
при изменении условий полета и режима
работы ВРД.
(Fкр,
Fc)
при изменении условий полета и режима
работы ВРД.
Потери энергии в рс
Критерии оценки потерь в РС:
– коэффициент скорости
φс = сс/cc.ад ≈ 0,97…0,985, (1.16)
оценивает потери скорости в РС, то есть скорость истечения из реального РС:
 ;
(1.17)
;
(1.17)
– коэффициент сохранения полного давления в РС
![]() ;
(1.18)
;
(1.18)
– кпд РС
 ,
(1.19)
,
(1.19)
оценивает потери кинетической энергии в РС.
Виды потерь в сверхзвуковых РС:
– внутренние потери;
– потери, связанные с нерасчетностью режима работы РС;
– потери на преодоление внешнего сопротивления ВУ.
Внутренние потери
1. Потери на трение (гидравлические потери).
В сверхзвуковых РС потери на трение (оцениваются φтр) значительны, так как в расширяющейся, достаточно длинной части РС течет сверхзвуковой поток.
Для снижения этого вида потерь можно применить эжекторные сопла, в которых расширение газа за критическим сечением происходит в границах свободной струи без стенок.