

Электрический привод (сокращённо — электропривод) — это электромеханическая система для приведения в движение исполнительных механизмов рабочих машин и управления этим движением в целях осуществления технологического процесса. Современный электропривод — это совокупность множества электромашин, аппаратов и систем управления ими. Он является основным потребителем электрической энергии (до 60 %)[1] и главным источником механической энергии в промышленности.

Функциональная схема
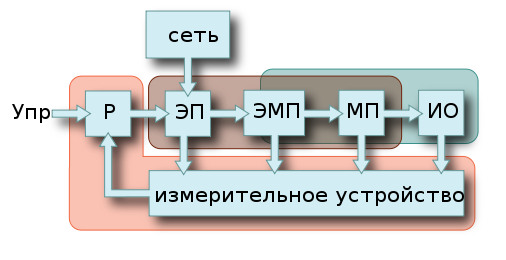
Функциональные элементы:
Регулятор (Р) предназначен для управления процессами, протекающими в электроприводе.
Электрический преобразователь (ЭП) предназначен для преобразования электрической энергии сети в регулируемое напряжение постоянного или переменного тока.
Электромеханический преобразователь (ЭМП) — двигатель, предназначен для преобразования электрической энергии в механическую.
Механический преобразователь (МП) может изменять скорость вращения двигателя, а также характер движения (с поступательного на вращательное или с вращательного на поступательное).
Упр — управляющее воздействие.
ИО — исполнительный орган.
Функциональные части:
Силовая часть или электропривод с разомкнутой системой регулирования.
Механическая часть.
Система управления электропривода.
Характеристики привода
Статические характеристики
Под статическими характеристиками чаще всего подразумеваются электромеханическая и механическая характеристика.
Механическая характеристика
Механическая характеристика — это зависимость угловой скорости вращения вала от электромагнитного момента M (или от момента сопротивления Mc). Механические характеристики являются очень удобным и полезным инструментом при анализе статических и динамических режимов электропривода.[1]
Электромеханическая характеристика двигателя
Электромеханическая характеристика — это зависимость угловой скорости вращения вала ω от тока I.
Динамическая характеристика
Динамическая характеристика электропривода — это зависимость между мгновенными значениями двух координат электропривода для одного и того же момента времени переходного режима работы.
Классификация электроприводов[4]
По количеству и связи исполнительных, рабочих органов.
Индивидуальный, в котором рабочий исполнительный орган приводится одним самостоятельным двигателем, приводом.
Групповой, в котором один двигатель приводит в действие исполнительные органы РМ или несколько органов одной РМ.
Взаимосвязанный, в котором два или несколько ЭМП или ЭП электрически или механически связаны между собой с целью поддержания заданного соотношения или равенства скоростей, или нагрузок, или положения исполнительных органов РМ.
Многодвигательный, в котором взаимосвязанные ЭП, ЭМП обеспечивают работу сложного механизма или работу на общий вал.
Электрический вал, взаимосвязанный ЭП, в котором для постоянства скоростей РМ, не имеющих механических связей, используется электрическая связь двух или нескольких ЭМП.
По типу управления и задаче управления.
Автоматизированный ЭП, управляемый путём автоматического регулирования параметров и величин.
Программно-управляемый ЭП, функционирующий через посредство специализированной управляющей вычислительной машины в соответствии с заданной программой.
Следящий ЭП, автоматически отрабатывающий перемещение исполнительного органа РМ с заданной точностью в соответствии с произвольно меняющимся сигналом управления.
Позиционный ЭП, автоматически регулирующий положение исполнительного органа РМ.
Адаптивный ЭП, автоматически избирающий структуру или параметры устройства управления с целью установления оптимального режима работы.
По характеру движения.
ЭП с вращательным движением.
Линейный ЭП с линейными двигателями.
Дискретный ЭП с ЭМП, подвижные части которого в установившемся режиме находятся в состоянии дискретного движения.
По наличию и характеру передаточного устройства.
Редукторный ЭП с редуктором или мультипликатором.
Электрогидравлический с передаточным гидравлическим устройством.
Магнитогидродинамический ЭП с преобразованием электрической энергии в энергию движения токопроводящей жидкости.
По роду тока.
Переменного тока.
Постоянного тока.
По степени важности выполняемых операций.
Главный ЭП, обеспечивающий главное движение или главную операцию (в многодвигательных ЭП).
Вспомогательный ЭП.
Подбор электродвигателя
Качество работы современного электропривода во многом определяется правильным выбором используемого электрического двигателя, что в свою очередь обеспечивает продолжительную надёжную работу электропривода и высокую эффективность технологических и производственных процессов в промышленности, на транспорте, в строительстве и других областях.
При выборе электрического двигателя для привода производственного механизма руководствуются следующими рекомендациями:
Исходя из технологических требований, производят выбор электрического двигателя по его техническим характеристикам (по роду тока, номинальным напряжению и мощности, частоте вращения, виду механической характеристики, продолжительности включения, перегрузочной способности, пусковым, регулировочным и тормозным свойствами др.), а также конструктивное исполнение двигателя по способу монтажа и крепления.
Исходя из экономических соображений, выбирают наиболее простой, экономичный и надёжный в эксплуатации двигатель, не требующий высоких эксплуатационных расходов и имеющий наименьшие габариты, массу и стоимость.
Исходя из условий окружающей среды, в которых будет работать двигатель, а также из требований безопасности работы во взрывоопасной среде, выбирают конструктивное исполнение двигателя по способу защиты.
Правильный выбор типа, исполнения и мощности электрического двигателя определяет не только безопасность, надёжность и экономичность работы и длительность срока службы двигателя, но и технико-экономические показатели всего электропривода в целом.
Алгоритм выбора электропривода
|
. |
|
Основными типами электродвигателей, которые используются для привода производственных механизмов с регулируемой скоростью движения рабочего органа, являются двигатели постоянного тока и асинхронные с короткозамкнутым или фазным ротором. Наиболее просто требуемые искусственные характеристики получаются у двигателей постоянного тока, поэтому до недавнего времени[когда?] они преимущественно и находили применение для регулируемых электроприводов. С другой стороны, асинхронные двигатели, уступая двигателям постоянного тока по возможностям регулирования частоты вращения, по сравнению с последними проще в изготовлении и эксплуатации и имеют относительно меньшие массу, размеры и стоимость. Именно эти отличительные свойства асинхронных двигателей определили их главенствующее использование в промышленном нерегулируемом электроприводе. В настоящее время двигатели постоянного тока вытесняются короткозамкнутыми асинхронными двигателями с преобразователями частоты, а также синхронными двигателями с постоянными магнитами на роторе и шаговыми. Число выпускаемых двигателей постоянного тока составляет лишь 4-5 % числа двигателей переменного тока и неуклонно снижается[источник не указан 868 дней].
Основное уравнение движения электропривода
Уравнение (2.3), приводимое ранее, соответствует статическому режиму работы электропривода – механическая мощность, развиваемая электродвигателем, полностью расходуется на преодоление момента сопротивления нагрузки, т.е. на совершение работы рабочим органом: Мд = – М'с. В этом случае, согласно второму уравнению Ньютона, все элементы электропривода движутся равномерно: d ωд / dt = 0. [1]
Во многих случаях привод ускоряется или замедляется, и тогда возникает инерционная сила или инерционный момент, который двигатель должен преодолевать, находясь в переходном режиме. Переходным (динамическим) режимом электропривода называется режим работы при переходе из одного установившегося состояния в другое, когда изменяются скорость, момент и ток.
При поступательном движении движущая
сила F
всегда уравновешивается силой
сопротивления машины Fc
и инерционной силой:
 ,
возникающей при изменении скорости. В
соответствии с вышеизложенным уравнение
равновесия сил при поступательном
движении примет вид:
,
возникающей при изменении скорости. В
соответствии с вышеизложенным уравнение
равновесия сил при поступательном
движении примет вид:
 ,
(3.1)
,
(3.1)
где m – масса тела, Н; V – скорость, м/с,; F – сила, Н.
Аналогично уравнение равновесия моментов для вращательного движения, называемое основным уравнением движения электропривода:
 .
(3.2)
.
(3.2)
С точки зрения закона сохранения энергии,
уравнение (3.2) показывает, что часть
механической мощности расходуется на
преодоление момента сопротивления: РО
– М'с,
другая часть – на изменение кинетической
энергии движущихся масс:
![]() .
При выводе уравнения принято, что масса
тела и соответственно момент инерции
являются постоянными.
.
При выводе уравнения принято, что масса
тела и соответственно момент инерции
являются постоянными.
В некоторых случаях принято говорить,
что развиваемый двигателем вращающий
момент Мд
уравновешивается моментом
сопротивления М'с
на его валу и инерционным или
динамическим моментом:
![]() .
.
Из анализа (3.2) видно:
1) при Мд > М'с – dω/dt > 0, т. е. имеет место ускорение (разбег) привода;
2) при Мд < М'с – dω/dt < 0, т. е. имеет место замедление привода (очевидно, что замедление привода может быть и при отрицательном значении момента двигателя);
3) при Мд = М'с – dω/dt = 0; в данном случае привод работает в установившемся (статическом) режиме.
Вращающий момент, развиваемый двигателем при работе, принимается положительным, если он направлен в сторону движения привода. Если он направлен в сторону обратную движению, то он считается отрицательным.
Отметим, что знак минус перед М'с указывает на тормозящее действие момента сопротивления, что отвечает усилию резания, потерям трения, подъему груза, сжатию пружины и т. п. при положительном знаке скорости.
При спуске груза, раскручивании или разжатии пружины и т. п. перед М'с ставится знак плюс, поскольку в этих случаях момент сопротивления помогает вращению привода.
Инерционный (динамический) момент (правая часть уравнения моментов) проявляется только во время переходных режимов, когда изменяется скорость привода. При ускорении привода этот момент направлен против движения, а при торможении он поддерживает движение. Инерционный момент как по значению, так и по знаку определяется алгебраической суммой моментов двигателя и момента сопротивления.
Исходя из сказанного о знаках моментов, (3.2) соответствует работе двигателя в двигательном режиме при реактивном моменте сопротивления (или при потенциальном тормозящем моменте сопротивления). В общем виде уравнение движения привода может быть записано следующим образом:
 .
(3.2а)
.
(3.2а)
Выбор знаков перед значениями моментов в (3.2а) зависит от режима работы двигателя и характера моментов сопротивлении.
Мягкая хар кА применяется там где требуется плавное медленное и ограничение больших пусковых моментов.
Электрическая машина имеет свойство , которое называется обратимостью. Может работать как в двигательном так и в генераторном режиме. В электроприводе генераторный режим является торможением для электродвигателя.
Существуют 3 вида торможения:
Рекуперативное торможение (генераторный режим параллельно с сетью) – Отдача электрической энергии в сеть
Динамическое торможение ( Автономного генератора режим) – отдача электрической энергии на сопротивление