

8. Моделирование переходных характеристик сау, скорректированной на симметричный оптимум.
 Н
Н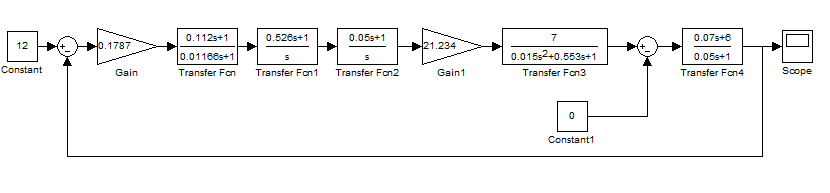 а
рис.14 представлена модель скорректированной
системы.
а
рис.14 представлена модель скорректированной
системы.
Рис.24. Схема скорректированной САУ в MatLab
1.)При отсутствии возмущений для граничных значений g.
1.1.)При результат моделирования представлен на рис.25.
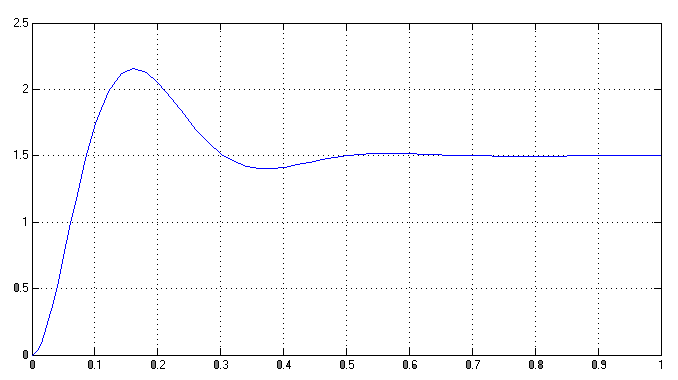
Рис.25. Результат моделирования при
Время
переходного процесса:

Время
регулирования:
 0.0866с
0.0866с
 Перерегулирование:
Перерегулирование:

Колебательность: N = 1
1.2.) При результат моделирования представлен на рис.26.
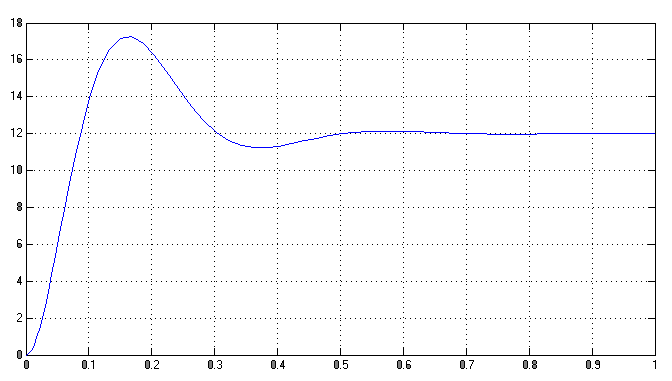
Рис.26. Результат моделирования при
Время переходного процесса:
Время
регулирования:

Колебательность: N =1
Перерегулирование:

2.)При действующих максимальных и минимальных возмущениях z для граничных значений g.
 2.1.)
При
2.1.)
При
 результат моделирования представлен
на рис.17.
результат моделирования представлен
на рис.17.
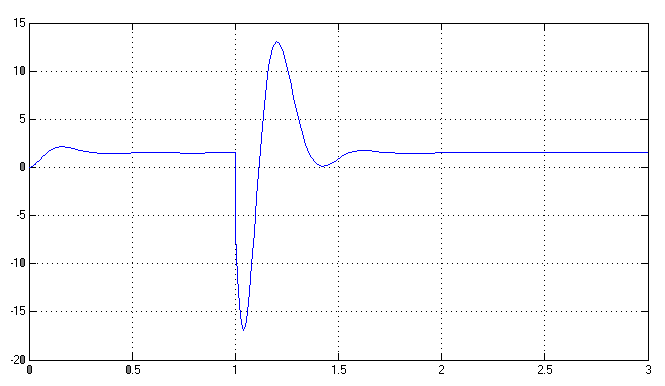
Рис.27.
Результат моделирования при

Время
переходного процесса:

Время регулирования: 0.1192с
Колебательность: N = 2
Максимальная динамическая ошибка:

2.2.)
При
 результат моделирования представлен
на рис.18.
результат моделирования представлен
на рис.18.
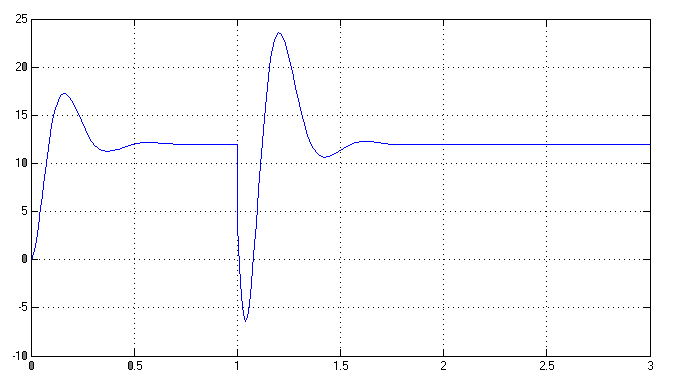
Рис.28.
Результат моделирования при

Время переходного процесса:
Время
регулирования:

Колебательность: N = 2
Максимальная динамическая ошибка:

Построим
с помощью пакета MatLab
логарифмические амплитудную частотную
характеристику (ЛАЧХ) и фазово-частотную
характеристику (ЛФЧХ) для разомкнутой
скорректированной системы. Результаты
моделирования представлены на рисунке.

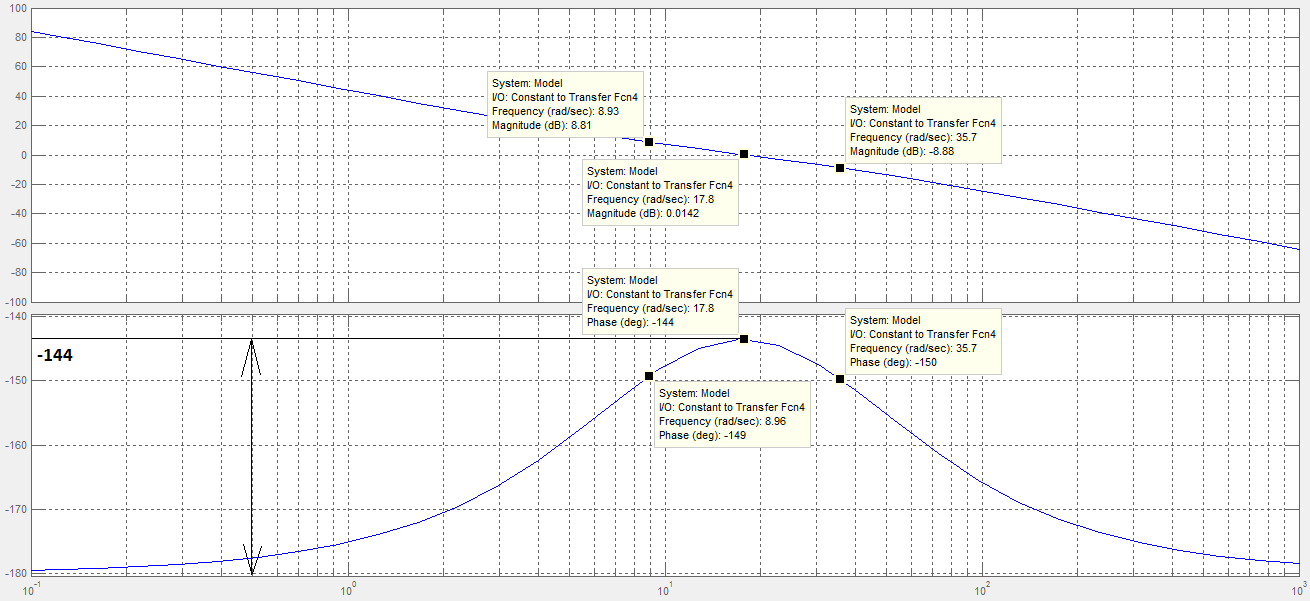
Рис.29. ЛАЧХ и ЛФЧХ для разомкнутой САУ, скорректированной на симметричный оптимум
Частота единичного усиления:

Частота сопряжения:


Запас
по фазе:

Запас
по амплитуде

8.1. Моделирование переходных характеристик упрощённой сау, скорректированной на симметричный оптимум.
 Проведем
моделирование переходных характеристик
для упрощенной САУ, настроенной на
симметричный оптимум для получения
более простого регулятора. Модель
представлена на рисунке.
Проведем
моделирование переходных характеристик
для упрощенной САУ, настроенной на
симметричный оптимум для получения
более простого регулятора. Модель
представлена на рисунке.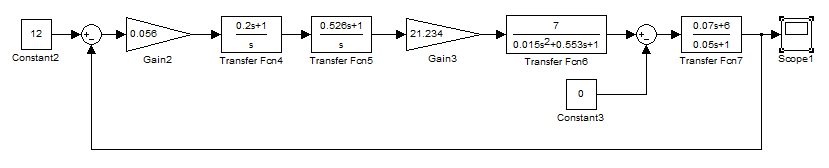
Рис.30. Схема скорректированной упрощенной САУ в MatLab
1.)При отсутствии возмущений для граничных значений g.
1.1.)При результат моделирования представлен на рис.21.
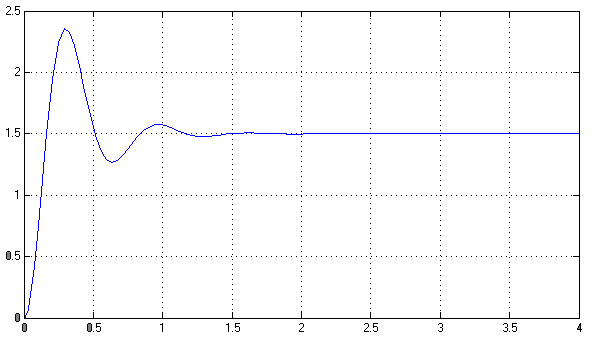
Рис.31. Результат моделирования при
Время переходного процесса:
Время
регулирования:

Колебательность: N = 2
Перерегулирование:
1.2.) При результат моделирования представлен на рис.22.
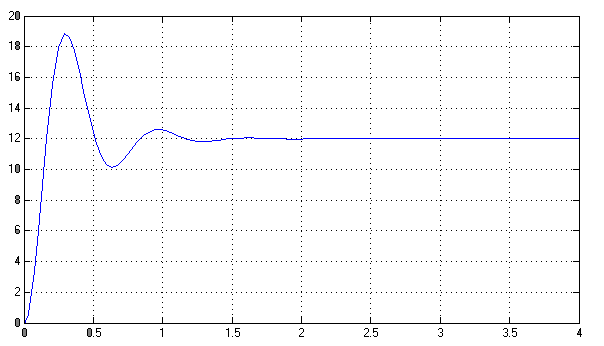
Рис.32. Результат моделирования при
Время переходного процесса:
Время
регулирования:

Колебательность: N = 2
Перерегулирование:
2.)При действующих максимальных и минимальных возмущениях z для граничных значений g.
2.1.) При результат моделирования представлен на рис.23.
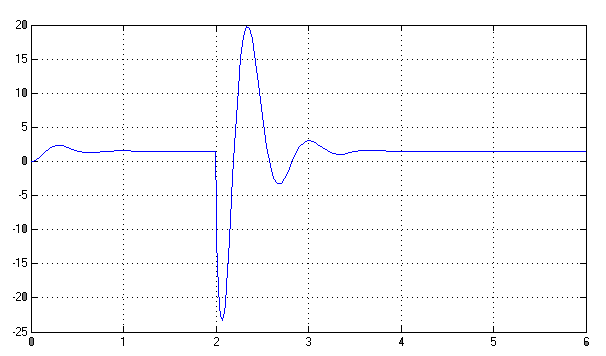
Рис.33. Результат моделирования при
Время переходного процесса:
Время
регулирования:

Колебательность: N = 2
Максимальная динамическая ошибка:


2.2.)
При
 результат моделирования представлен
на рис.24.
результат моделирования представлен
на рис.24.
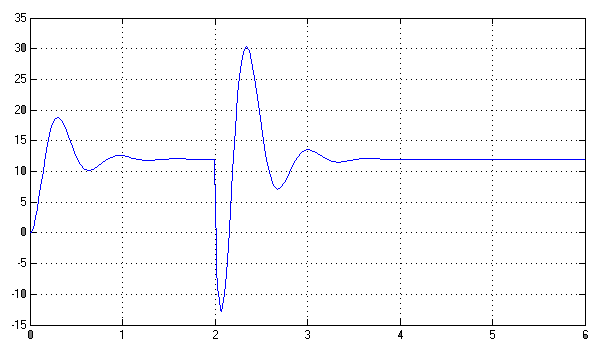
Рис.34.
Результат моделирования при

Время переходного процесса:
Время
регулирования:

Колебательность: N = 2
Максимальная динамическая ошибка:

Построим с помощью пакета MatLab логарифмические амплитудную частотную характеристику (ЛАЧХ) и фазово-частотную характеристику (ЛФЧХ) для разомкнутой скорректированной системы с упрощенным регулятором. Результаты моделирования представлены на рис.
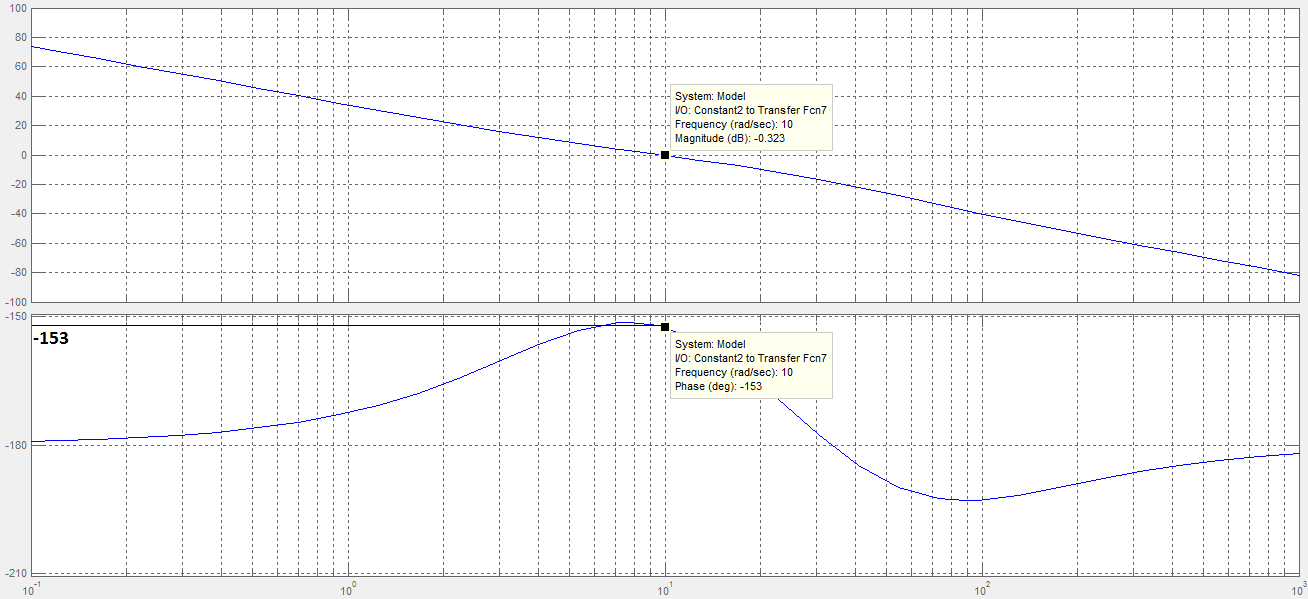
Рис.35. ЛАЧХ и ЛФЧХ для разомкнутой упрощенной САУ, скорректированной на симметричный оптимум
Частота
единичного усиления:

Запас
по фазе:

Запас по амплитуде
 По
полученным показателям качества можно
сделать вывод о том, что с помощью
упрощенного регулятора не возможно
точно настроить систему на симметричный
оптимум.
По
полученным показателям качества можно
сделать вывод о том, что с помощью
упрощенного регулятора не возможно
точно настроить систему на симметричный
оптимум.