

Процесс преобразования значений входных переменных х1 и х2 в выходную у.
Пусть каждая из входных переменных имеет 5 термов, а выходная переменная, являющаяся управляющим воздействием, 7 термов.

Пусть входные переменные х1=ξ1, а х2=ξ2. Процедуру преобразования поясним на примере действия двух правил:
ЕСЛИ
 И
И
 ТО
ТО

ЕСЛИ
 И
ТО
И
ТО

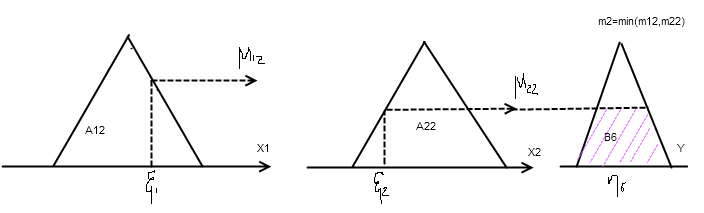
На этапе позификации входные физические переменные преобразуются в соответствующие термы. Для рассматриваемого примера значение х1=ξ1, а х2=ξ2 измеренные в некоторый момент времени определяют два значения ФП термов А12, А22.
µ12=0.7 µ22=0.4
µ11=0.73 µ22=0.4
На этапе логического заключения выходным термом переменной у присваивается значение ФП входных переменных с общим условием µ(у)≤µ(х) и конкретно для правил с оператором «И» согласно принципу минимума.


В результате выходные термы В6=РМ и В7=РВ оказываются усеченными минимальными значениями входных функций принадлежности. Полученные по двум активизированным правилам термы В6 и В7 объединяются по принципу максимума (оператор «ИЛИ») в один общий терм В=В6 Ѵ В7. Полученный результирующий терм В определяет множество возможных значений управляющего воздействия у. Преобразование входных термов в выходные с передачей от входа к выходу значений функций принадлежности по принципу минимума-максимума получило название min-max регулятор Мамдани.
ЕСЛИ И
ЕСЛИ И

Вопрос как выбрать одно конкретное значение η для физической выходной переменной решается на третьем этапе преобразования – дефазификации.
Лекция 5 (02.11.2013)
На этом этапе логическая переменная должна быть преобразована в определенное значение физической переменной – управляющее воздействие. Для интегральной оценки одним числом всего множества значений в fuzzy-логике за это число принимают абсциссу центра тяжести площади усеченной части терма.
Расчет производится по формуле:

Данный метод для расчета значения оказывается сложным, поскольку требует много места в тетради. На практике используют его достаточно несложную модификацию в виде, так называемых, … функции:

Кроме рассмотренной системы Мамдани, существует нечеткая система Сугэно. Если в системе Мамдани база знаний состоит из правил вида:
ЕСЛИ х1 – низкий И х2 – средний ТО у=а0+а1х1+а2х2
То основное различие между системами Мамдани и Сигуна, заключается в разных способах задания значений выходной переменной в правилах, образующих базу знаний.
В системах типа Мамдани, значения выходной переменной задаются нечеткими термами, в системе типа Сугэна, как линейная комбинация входных переменных.
Fuzzy-управление, в принципе, не требует знаний точной модели объекта тогда, когда необходимый алгоритм управления возможно сформулировать лингвистическим путем, а в тех областях, где возможно и фаззи и традиционное управление, предпочтение отдается способу, который дает лучший результат по требуемому показателю.
Лекция 3 (12.10.2013)
Control System Toolbox (CST)
CST предназначен для моделирования, анализа и проектирования САУ как непрерывных, так и дискретных. Модели CST могут быть одномерными и многомерными (SISO, MIMO).CST модели могут быть представлены в следующем виде: tf-форма, zpk-форма, ss-форма, dss-форма, fzd-форма.
Ss-модель (StateSpace) – модель в пространстве состояний, которая представляет ДУ в нормальной форме Коши, которая дополняется алгебраическими уравнениями, связывающие выходные переменные с переменными состояниями.

Где u – вектор входных переменных, y – вектор выходных переменных, x– вектор переменных состояний; А – матрица состояния, В – матрица входных воздействий, С – матрица выходных воздействий, D – матрица проходная.
B
D
∫
C










u
x
y
x

Задание этой модели в командной строке происходит следующим образом:
Sys=ss ([A], [B], [C], [D])
Tf (transferFunction) передаточная функция, задается многочленом в числителе и многочленом в знаменателе.
h= tf ([num], [den])


Структурная схема САУ может быть построена в CST с помощью функций соединения LTI модели. Представим эти функции в таблице.
Parallel |
Параллельное соединение (сложение lti-моделей) |
Series |
Последовательное соединение (умножение lti-моделей) |
Feedback |
Соединение с ОС |
Append |
Объединение lti-моделей с добавлением входов и выходов |
Connect |
Объединение моделей с использованием матрицы соединений |
Star |
Объединение взаимосвязанных многомерных моделей |
Параллельное соединение моделей
Sys=parallel(sys1, sys2)=parallel(sys1, sys2, in1, in2, out1, out2)
Эта функция эквивалентна операции сложения lti-моделью
Последовательное соединение
Sys=series(sys1, sys2)=series(sys1, sys2, out1, in2)
Эта функция эквивалентна операции умножения lti-моделей sys=sys1*sys2
Соединение lti-моделей с ОС
Sys=feedback(sys1, sys2, sign)
Где

Объединение моделей с помощью функции append и матрицы связей Q. Функция append позволяет объединить разрозненные модели в одну многомерную.
Sys=append(sys1, sys2, …, sysN)
Матрица связей Q предназначена для описания связей блоков на структурной схеме. Каждая строка этой матрицы соответствует одному входу системы sys. Первый элемент строки – это номер входа, последующие элементы указывают номера выходов, которые алгебраически суммируются по этому входу. Отрицательные элементы обозначают суммирование со знаком «-».
Пример. Необходимо для заданной структурной схемы в виде переменных передаточной функции построить ее одномерную модель.

Возможны два варианта решения задачи:
С использованием операторов series, feedback
С использованием операторов append, connect
Вводим в CST параметры звеньев s1, s2:


Объединим звенья s1 и s2:

Составим матрицу соединения звеньев:

Зададим вход и выход агрегированной модели:


Выполним соединение звеньев:

Исследуем:

Получим передаточную функцию последовательного соединения:

Получим передаточную функцию с учетом ООС:

Исследуем:

Лекция 5 (02.11.2013)
Функции преобразования дискретных моделей в непрерывные в CST (Control System Toolbox)
Очень часто при проектировании САУ возникает необходимость получения дискретных моделей непрерывных систем, при выполнении этого преобразования требуется обеспечить эквивалентность систем. Эквивалентность понимается в том смысле, что при соответствующих начальных условиях, их реакции на одно и тоже воздействие должно совпадать. Погрешность в преобразовании вносит дискретизации по времени и квантование по уровню. Дискретизация сигналов по времени делает систему дискретной, а квантование по уровню – нелинейной. Оба процесса сопровождаются возникновением методических погрешностей. Выбор частоты дискретизации производится исходя из ширины полосы пропускания или из времени регулирования замкнутой системы. У разомкнутой системы, частоты дискретизации в 6-10 раз больше полосы пропускания или от 2 до 4 дискретных отсчетов за время нарастания. В противном случает качество системы будет резко ухудшаться.
Однако при увеличении частоты квантовании более чем в 2 раза по сравнению с верхнпей частотой спектра сигнала (по теореме Котельникова) дальнейшего увеличения качества регулирования не происходит. Определение целесообразного значения шага может быть найдено так же по формуле из методички Шалобанова.

Крс – коэффициент передачи разомкнутой системы, Tmin – наименьшая из постоянных времени апериодических звеньев, входящих в соответствующую систему.
Количество ступеней квантования оказывает существенное влияние на динамические свойства системы.
В состав CST включено две функции для преобразования непрерывных моделей в дискретные и дискретные в непрерывные: c2d, d2c.
Метод экстраполяции |
Описание метода |
наличие в simulink |
zero-order hold |
экстраполяция нулевого порядка |
+ |
first-order hold |
экстраполяция первого порядка |
+ |
tustin |
биполярна аппроксимация Тастина |
- |
prewarp |
аппроксимация Тастина с коррекцией |
- |
matched |
метод соответствия нулей и полюсов |
- |
sysD=c2d(sysC,Ts,’метод’) – реализует построение дискретной модели sysD непрерывной модели sysС с периодом дискретизации Ts и с использование одного из вышеперечисленных методом экстраполяции. Если метод не указан, то по умолчанию используется экстраполяция нулевого порядка (ZOH).