

Приборы управления полетом ракет
Приборы управления обеспечивают устойчивое движение ракеты по заданной траектории и высокую точность попадания в цель. Их состав зависит от способа управления ракетой. Ранее было отмечено, что способы управления включают в себя АУ, ТУ, СН, КУ.
1. Приборы автономного управления
Существует несколько разновидностей приборов автономного управления:
- астронавигационные (обеспечивают определение места ракеты в полете по небесным светилам);
- магнитометрические (определяют место ракеты по характеристикам магнитного поля Земли);
- инерциальные, получившие наибольшее распространение.
Последние могут быть просто инерциальными и инерциальными с астро-коррекцией.
Инерциальная система АУ на БР включает в себя автомат стабилизации и автомат дальности, на КР стоит только автопилот.
Автомат стабилизации (АС) предназначен для обеспечения движения БР по рассчитанной на корабле и введенной в бортовые приборы ракеты программной траектории. Для этого АС должен:
- тангажа (гамма) - в вертикальной плоскости (относительно поперечной оси);
Рис. 1.6. Углы тангажа,
рыскания и крена, подлежащие стабилизации
во время полета ракеты

- крена (фи) - вокруг продольной оси;
б) обеспечивать после вертикального старта поворот ракеты в сторону цели;
в)обеспечивать разворот ракеты на заданный угол тангажа.
Основой АС является гиро-стабилизированная платформа (гироплатформа) с тремя степенями свободы (рис. 1.7). На этой платформе располагаются три гироскопа. Их оси устанавливаются в определенное положение. Благодаря этому во время полета ракеты регистрируются отклонения корпуса ракеты от заданных углов гамма, пси, фи. Таким образом, гироплатформа выполняет роль датчиков изменения углов тангажа, рыскания и крена. Информация об изменении положения ракеты в пространстве фиксируется тремя потенциометрами (на рисунке показан только один из них),

Рис. 1.7- Функциональная схема автомата стабилизации БР
Сами потенциометры связаны с корпусом ракеты, а их движки - с гиро-платформой, т. е. с гироскопами. При изменении углов гамма, пси, фи потенциометры поворачиваются, а движки остаются на месте. В результате этого с потенциометров снимаются напряжения Uгамма, Uпси, Uфи той или иной полярности (что зависит от стороны изменения углов), той или иной величины (что зависит от величины тех же углов). Далее, как видно из рис. 1.7, эти напряжения усиливаются и поступают на исполнительные устройства, роль которых выполняют рулевые машинки. Рулевые машинки поворачивают рулевые реактивные двигатели (или иные рули), возвращая ракету на заданное направление полета. При этом движки потенциометров вновь оказываются в первоначальном (нулевом) положении.
Наряду с изменениями углов гамма, фи и пси во время полета ракеты возможно ее смещение (снос) в горизонтальном и вертикальном направлениях. Гироскопы на снос не реагируют. Для учета такого смещения используют инерционные датчики линейных ускорений, называемые акселерометрами. Схема самого простейшего акселерометра приведена на рис. 1.8. Он представляет собой массивное (инерционное) тело, укрепленное на пружинах. При возникновении сноса ракеты массивное тело под действием сил инерции стремится сохранить свое положение неизменным. В результате этого потенциометр, связанный с корпусом ракеты, смещается, а его движок остается на месте. В таком случае с движка потенциометра снимается напряжение U1, пропорциональное ускорению смещения а. После интегрирования получают U2, пропорциональное скорости смещения v. После вторичного интегрирования получают Uз, пропорциональное пути S. Зная расстояние, на которое сместилась ракета, можно возвратить ее на заданную траекторию. Чтобы осуществлять эту операцию, на ги-роплатформе размещают два акселерометра.
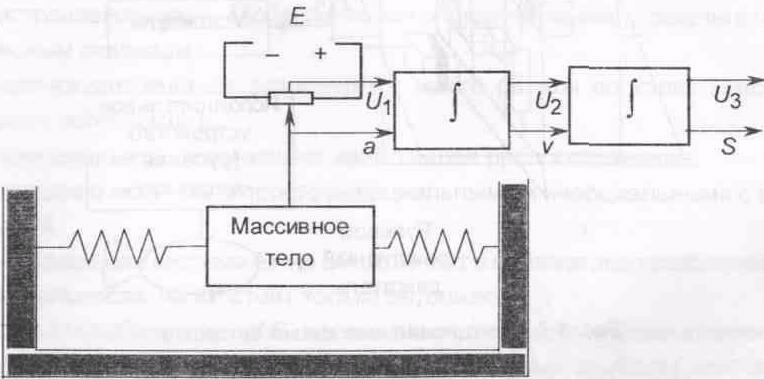
Рис. 1.8. Функциональная схема акселерометра
Совместное действие гироскопов и акселерометров поясняется схемой на рис. 1.9. На современных ракетах в качестве акселерометров используют гироскопы со смещенным вдоль оси центром массы.


Рис. 1.10. Структурная схема автомата дальности
Автомат дальности (АД) предназначен для выключения двигателя БР по достижении ею установленной (программной) скорости. Принцип работы АД поясняется схемой на рис. 1.10.
Источником информации о скорости полета БР является акселерометр. После интегрирования U1 получают U2, пропорциональное скорости v попета ракеты. При совпадении этой скорости с заданной (v3), определяемой Uпр, срабатывает схема сравнения. Двигатель ракеты выключается. Именно при этой скорости и заданном угле тангажа ракета достигает цели.
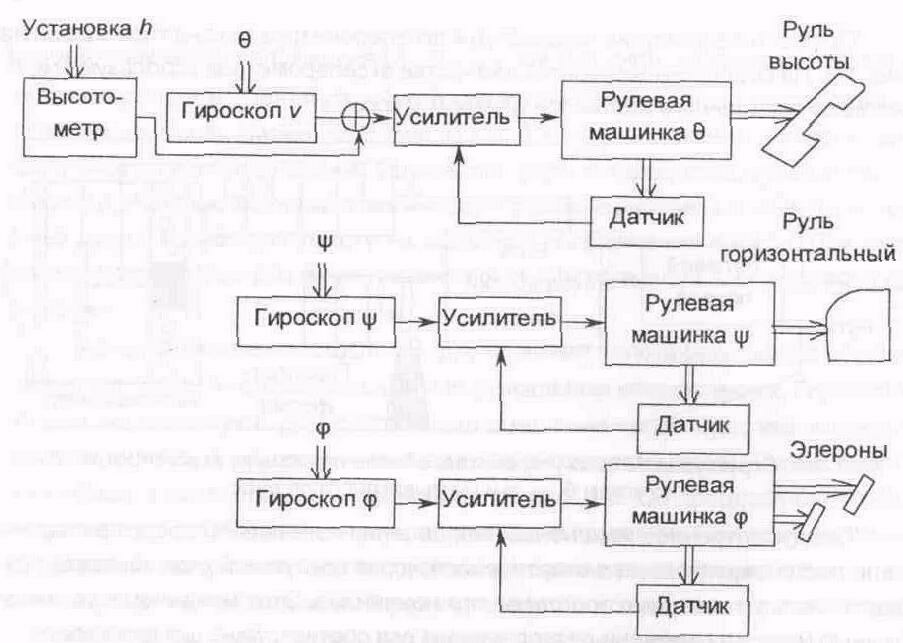
Рис. 1.11. Структурная схема автопилота
Автопилот (АП) представляет собой инерциальную автономную систему управления полетом КР, его схема приведена на рис. 1.11. АП отличается от АС тем, что у него отсутствует гироплатформа. Каждый гироскоп управляет своим рулем. Кроме того, в АП имеется высотомер, который поддерживает установленную высоту полета КР. Он может быть барометрическим или радиотехническим. Барометрический высотомер применяется при высотах более 15... 20 м, а радиотехнический - на малых высотах.