

Был равен исходному дисбалансу
Dст = Мрl
Таким образом ротор будет уравновешен.
При известной массе ротора Мр можно определить эксцентриситет массы l из уравнения
Dст = Dст1
Или
Мрl = Мr
Откуда
![]() (3.4)
(3.4)
Это значение эксцентриситете l определяет статический дисбаланс и используется для характеристики точности балансировочных устройств.
Статическая балансировка центробежных машин на практике проводиться в три этапа.
Первый этап преследует цель устранения дисбаланса прикрепления корректирующих грузов с диаметрально противоположной стороны или удалением эквивалентного их количества. При этом добиваются равновесия балансируемого ротора в 6 – 8 положениях при его повторе вокруг оси.
Второй этап статической балансировки ставит своей целью исключение скрытой неуравновешенности вследствие трения между шейками вала и поверхностями ножей или вращающихся дисков.
Третий этап представляет собой контроль балансировки с помощью контрольного груза.
ОПИСАНИЕ ЛАБОРАТОРНОЙ УСТАНОВКИ
Балансировочный станок с вращающимися дисками представлен на (рис.3.3.). он состоит из опорной плиты со стойками, в которые вмонтированы подшипники качения с вращающимися дисками 2. Опорная плита имеет регулировочные винты 4, позволяющие устанавливать ее в горизонтальном положении. Положение стойки 3 определяется длиной вала ротора.
Для проведения балансировки роторов необходимы следующие материалы и инструменты: штангенциркуль, мел, пластилин, балансировочные грузы, весы с точностью измерения до 1г, разновесы, уровень или индикатор со стойкой для проверки горизонтальности установки вала ротора.
МЕТОДИКА ПРОВЕДЕНИЯ ЭКСПЕРИМЕНТАИ ОБРАБОТКА РЕЗУЛЬТАТОВ
5.1. Методика эксперимента
При выполнении первого этапа статической балансировки окружность ротора делят на несколько равных частей (6 или 8). Ротор устанавливают так, чтобы каждая пара диаметрально противоположных точек последовательно оказывались в горизонтальной плоскости. В этих точках к ротору прикрепляют корректирующие грузы, которые уравновешивают его для каждой пары точек. Этими операциями добываются равновесия балансируемого ротора во всех положениях при его перекатывании. На практике излишний металл в «тяжелых» местах ротора удаляют сверлением, рубкой, течением, а добавляемый груз в «легких» местах ротора придается либо в виде специальных балансировочных болтов с разновысокими головками (для подбора), либо приваривают к нему дополнительный груз, заливают металлом пустоты и т.д.
При осуществлении второго этапа балансировки два противоположных деления ставят горизонтально и в точке одного из делений на выбранном радиусе r от оси, удобном для крепления грузов, подвешивают грузы до тех пор, пока деталь не повернется на ножах или вращающихся дисках на угол a = 200 - 300. Такая операция производится, для всех точек делений окружности ротора и после каждой операции грузы взвешивают.
Зависимость веса подвешенных грузов в точках деления окружности ротора (например, т. 1,2,3,4,5,6) представляют графически (рис.5.7)
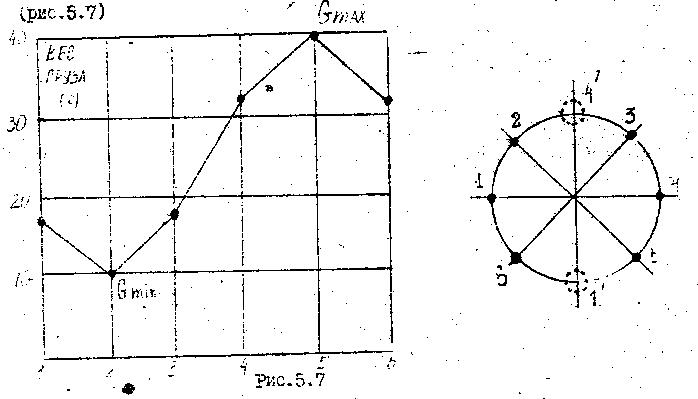
Из представленного графика (рис.5.7.) видно, что со стороны т.2, где груз имеет минимальный вес, ротор имеет «тяжелое» место, а в т.6 - «легкое» место.
Вес уравновешивающего груза, учитывающего трение между шейками вала и ножами или вращающимися дисками, будет равна полу разности весов наибольшего Gmax и наименьшего Gmin грузов:
![]() (5.1)
(5.1)
Этот груз закрепляют на роторе со стороны Gmax на расстоянии r от центра.
Третий этап, т.е. контроль статистической балансировки, осуществляется с помощью контрольного груза, величина которого определяется по формуле
![]() (5.2)
(5.2)
где Gp - вес ротора;
l - эксцентриситет массы ротора;
K - коэффициент трения качения, который принимается равным для ножей К = (0,003 - 0,005) см, для вращающихся дисков К =(0,001 - 0,003) см.
Для определения в уравнении (5.2) плеча дисбаланса необходимо иметь условие, обеспечивающее допустимую степень неуравновешенности узла при его роторе.
Для вращающихся роторов и узлов оно имеет вид:
![]() (5.3)
(5.3)
где
![]()
допустимая возмущающая сила (центробежная сила), возникающая при работе отбалансированного с данной точностью ротора;
n - число оборотов ротора при его вращении, об/мин;
g =9,8 м/с2 - ускорение свободного падения.
Тогда из условия
![]() (5.4)
(5.4)
определяем
![]() (5.5)
(5.5)
Задаваясь численным значением числа оборотов n по уравнению (5.5), определяем плечо дисбаланса l и, подставляя это значение в уравнение (5.2), определяют теоретически величину контрольного груза Gконтр.
Для окончательной проверки (на контрольный груз) степень уравновешенности ротора выбирают две пары противоположных точек деления окружности, расположенных на взаимно перпендикулярных диаметрах. Эти четыре точки деления окружности ротора устанавливают в горизонтальное положение и для каждой точки подбирают груз, под действием которого ротор делал бы поворот на угол = 100 - 200. Половина разности между наибольшим и наименьшим весами подобранных грузов не должна превышать величины контрольного груза, подсчитанной по формуле (5.2), т.е.
![]()
![]()
Порядок выполнения работы и обработки результатов измерений
Установить балансируемый ротор на вращающихся роликах.
С помощью уровня или индикатора установите ось вращения балансируемого узла в горизонтальное положение с точностью до 0,02 мм и 1 погонный метр.
Разделите окружность ротора на 6 - 8 равных частей на радиусе r , заданном преподавателем.
Приступая к первому этапу балансировки, устанавливайте ротор так, чтобы каждая пара диаметрально противоположных точек (например т. 1-4, 2-5, 3-6) последовательно оказывались в горизонтальной плоскости. Корректирующими грузами весом Gi, прикрепляемыми к ротору на выбранном радиусе r, уравновешивайте ротор для каждый пары точек.
Снимите грузы и взвесьте их, значения весов грузов Gi запишите в табл. 5.1.
Взвешенные грузы прикрепите в соответствующие точки ротора.
Приступая ко второму этапу балансировки, устанавливайте ротор аналогично П.4. в каждой точке деления ротора подвешивайте дополнительные грузы весом Giтр до тех пор, пока ротор не повернется на роликах на угол
= 200 - 300. Каждый груз Giтр запишите в табл. 5.2.
Постройте график обхода грузом окружности балансируемой детали (рис.5.7.) по данным табл. 5.2. рассчитайте вес уравновешивающего груза Gтр и закрепите его в «легком» месте ротора.
Приступая к третьему этапу балансировки, установите ротор в два горизонтальных положения на взаимно перпендикулярных диаметрах (например, 1-4 и 1 - 4 см рис.5.7.). в этих точках деления ротора подвешивайте грузы весом Giк до тех пор пока ротор не повернется на угол = 100 - 200 .
снимайте груз и взвешивайте. Значение весов грузов запишите в табл.5.3.
По формуле (5.6) определите Gkэксп.
Задаваясь числом оборотов n и весом ротора Gp, по формулам (5.5) и (5.2) рассчитайте допустимый эксцентриситет массы l и теоретическую величину контрольного груза Gконтр.
Сравнивая значения Gkэксп и Gконтр сделайте вывод о степени уравновешенности ротора.
Таблица 5.1
Экспериментальные данные первого этапа статической
балансировки ротора
Номер точки ротора |
1 |
2 |
3 |
4 |
5 |
6 |
Вес груза (г)
|
|
|
|
|
|
|
Таблица 5.2
Экспериментальные данные второго этапа статистической
балансировки ротора
Номер точки ротора |
1 |
2 |
3 |
4 |
5 |
6 |
Вывод о месте закрепления |
|
|
|
|
|
|
|
|
Таблица 5.3
Экспериментальные данные третьего этапа статической
балансировки ротора
Массы точки ротора
1 4 1 4 |
Вывод о степени уравновешенности |
|
|
Таблица 5.4
Параметры установки и константы
Вес ротора (кг) 16 |
Число оборотов ротора |
Коэффициент трения качения |
Радиус расположения массы 190 |
|
|
|
|
Контрольные вопросы
Дайте определение процесса статической балансировки, назовите виды устройств для статической балансировки.
Объясните условие статического равновесия вращающихся роторов. Что такое статический дисбаланс ротора?
В чем заключаются три этапа статической балансировки роторов?
Объясните условие, обеспечивающие степень уравновешенности центробежного ротора при его работе.
Объясните последовательность операции контрольной статистической балансировки ротора.