

26. Формы и размеры земли. Земной эллипсойд. Геодезические координаты
Для простоты измер-я вычисл-й поверх-ть земли проектируют на геоид,земной элипсоид или шар.
Земной эллипсойд – образован вращением эллипса вокруг малой оси – фигура, описанная математич. законами по которых происходит проецирование на карты земной пов-ти.
Геодезическая долгота (L) – двугранный угол между плоскостью гринвического меридиана и плоскостью геодезического меридиана наблюдателя.
Геодезическая широта(В)-угол м/у плоск-ю экватора и нормалью референс элипсоиду(элипсоиду вращения) в точке нахождения наблюдателя .
27. Расчет воздуш скорости полета и числа м. Расчет приборной скорости полета.
Расчет воздушной скорости полета производится по формулам:
Для широкой стрелки:
Vист=Vпр+∆Vи+∆Va-∆Vcж+∆Vпл,
где
Vист=Vпр+∆Vи+∆Va-∆Vcж
– Vиспр
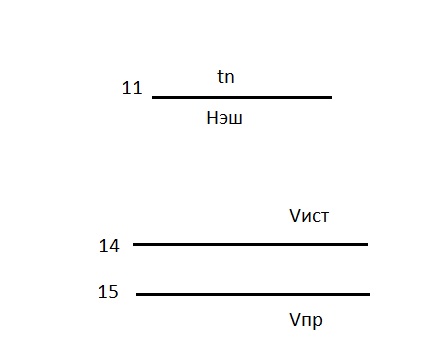
Vист=Vпр.кус.+∆Vи+∆Va+∆Vтемп. Vпр=Vист-∆Vтемп-∆Va-∆Vи
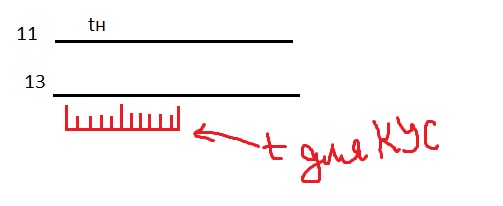
Для узкой стрелки:

Число М рассчитывается по формуле:
M=Vист./a
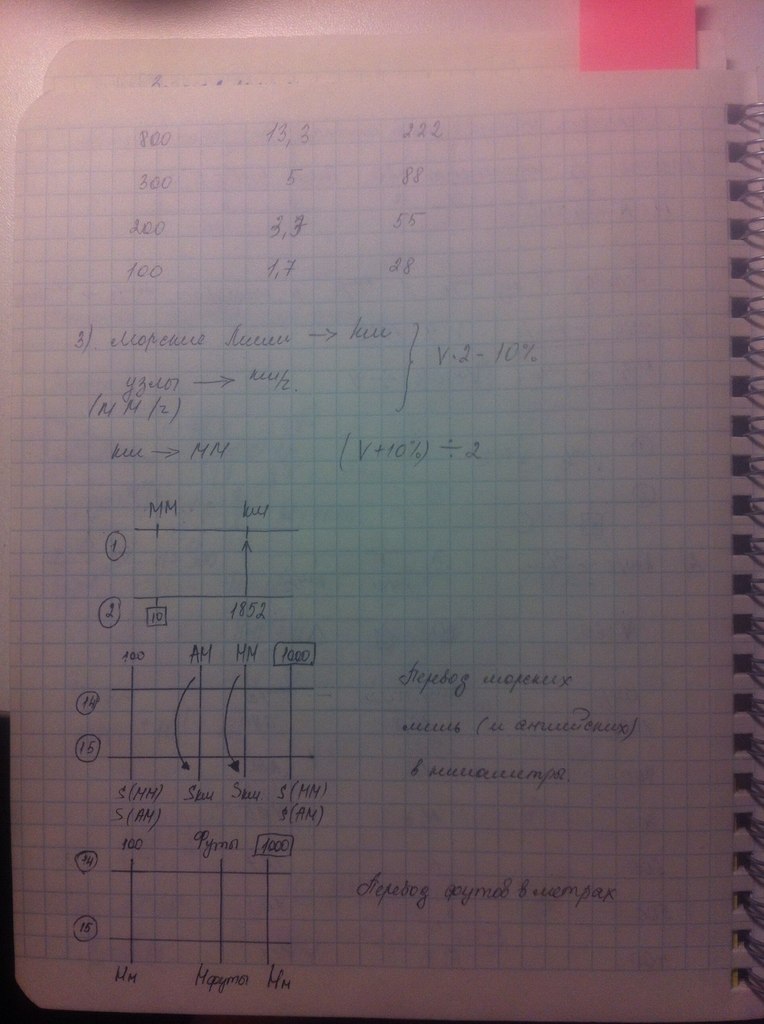
28. Перевод скорости Км/ч в м/с. Мм ам в км обратно.


29. Применение наземных и бортовых рл.
Наземные РЛС – УДНС, приемо-передающие радиотехнические устройства, работающие в импульсном режиме сантиметровом, дециметровом и метровом диапазонах волн. Предназначены для осуществления контроля за движением ВС и решения задач навигации. В ГА применяются обзорные, диспетчерские и посадочные РЛК. ОРЛ ориентируются по истинному меридиану в точке стояния, что необходимо учитывать при прокладке линии положения и определения пеленга ВС. Место определяется по азимуту и дальности, времени. НЭП определяется на контрольном этапе и полетам на и от РЛС. МПС=А- М; БУ=МПС-ЗМПУ=ИПС-ЗИПУ.
При полете от РЛС: Авых=ЗМПУ+ М; Кслед=Кр-БУ=ЗПУ-УСф; УСф=ИПС-ИК=ИПС-(МК+ М)
При полете на РЛС: Авых=ЗМПУ+ М+/-180; ПК=БУ+ДП; Кппм,кпм=Кр-ПК.