

9. Устр-во и применение барометрического высотомера. Ошибки высотомеров.
Предназ-н для определения и выдерживания Н полета.
Основные узлы: 1)чувств-й элемент(анероидная коробка); 2)передаточно-множественный механизм; 3)индикаторная часть(стрелка кот-я указ-т Н полета); 4)механизм установки начального Р(статический трубопровод); 5)корпус прибора.
Баром-й высотомер рассчит-ся для станд-го атмосф. Р, кот-е=760(t=-15). Откл-ие от станд-х условий пересч-ся экипажем.
Ошибки:
1)Инструментальные-в следствии погрешности изготовления,износа детали,изменение упругих сво-в чувст-го элемента. Ошибки выявляются при контрольных проверках.Результаты сводятся в таблице.
2)Аэродинамические-возникают за счет неточного измерения статического Р на Н полета. Рст восприним-ся приемником Рст или специальными отверстиями в корпусе самол.Искожение потока приводит к ошибкам измерения Р.Эти ошибки опред-ся
при летных испытаниях.Графики учета этих ошибок издаются для каждого типа ВС.
3)Методические-вызыв-ся несовершенством принятого метода измерения-несоответ-ие фактич-х t и Р у земли их расчетным значениям.
Ликвидация ошибки происходит установкой высотомера на 0 перед взлетом. Ошибки из-за несоответ-ия t принятой в расчет механ-ом высотомера учит-ся по формуле или на НЛ-10
∆ Нt=Tнулевое-15/300*Нисправ.
10. Скорость полета. Аэродинамич метод измерения скорости.
Воздушная скорость полета скорость относительно воздуха. Различают Vи, Vпр. Истинная для СВЖ, приборная для пилотирования.
Аэродинамический метод измерения скорости основан на замере давления встречного давления воздуха.
-24-
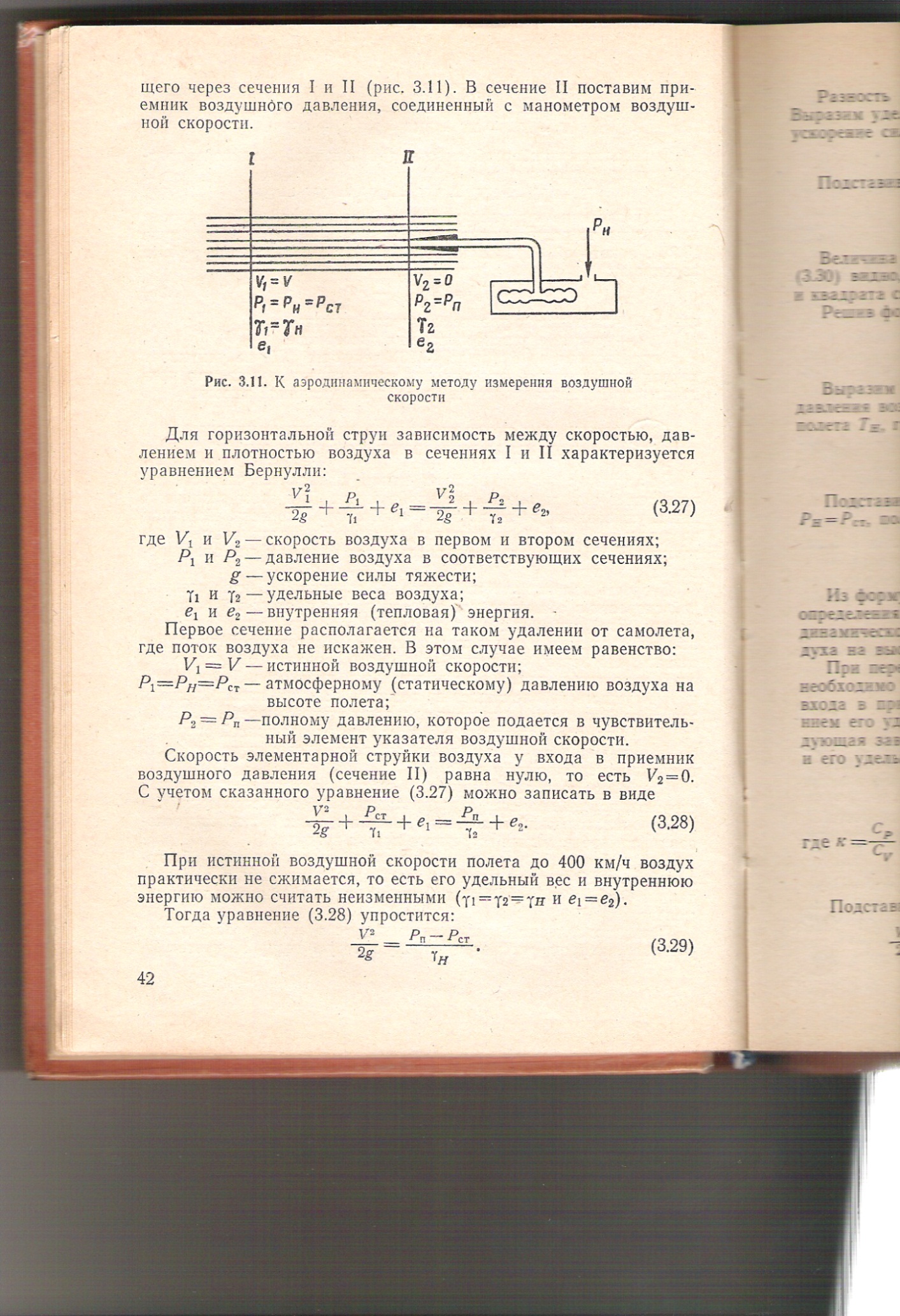
Для горизонтальной струи зависимость между скоростью, давлением и плотностью в сечениях I и II описывается уравнением Бернули:
![]() +
+ ![]() + е₁
=
+ е₁
= ![]() + е₂
+ е₂
При Vи до 400км/ч воздух не сжимается – удельный вес(ɣ₁ = ɣ₂ = ɣн) и внутренняя энергия(е₁ = е₂) неизменны
= ![]() (1) ɣн
= ρнg;
Рп – Рст = q
- динам-ое Р или скоростной напор;
(1) ɣн
= ρнg;
Рп – Рст = q
- динам-ое Р или скоростной напор;
ρн – массовая плотность; g – ускорение силы тяжести
q
= ρн![]() (2) ρн
=
(2) ρн
= ![]() ; Рн =Рст подставив в (2) получим:
; Рн =Рст подставив в (2) получим:
V
= ![]() (3).
(3).
Для
V˃400
учитывается сжимаемость что сопровождается
изменением удельного веса и внутренней
энергии. е = ![]() ; к =
; к = ![]() отношение удельных теплоемкостей при
постоянном давлении и обьеме.
отношение удельных теплоемкостей при
постоянном давлении и обьеме.
V
= ![]() (4)
(4)
Из (4) – для измерения Vи необходимо знать: температуру на высоте, динамическое и статическое давления. V = f(q, Рст, Тн).
Указатели Vпр измеряют только q. В них Рст = Р ̥= 760мм рт.ст. и Тн = Т ̥ = 288 ̊К. По этому Vпр = Vи только у земли.
В указателях Vи измеряют Рст ,q и градуируются по формулам (3),(4) температура считается равной стандартной на высоте полета.
11. Уст-во указателей воздуш. скорости УС, КУС. Ошибки УС, КУС.
Это прибор для измерения V (УС).Бывают 2 типов: 1) указатели приборной V (УС); 2)комбинир.УС(КУС)
УС по средствам магистралей трубопроводов соединяются с ПВД,кот-е бывают 2 типов-совмещенные и раздельные.
УС состоит из мембранной монометрической коробки, передаточно-множительного механизма,шкалы V и стрелки.Механизм указателя смонтрован в гирметичном корпусе в задней стенке кот-го 2 штуцера для Рп и Рст.
КУС предназ-н для одноврем. Vприб и Vист.
Основные узлы: 1)чувствительный элемент для динамического Р; 2)чувств-й элемент для Рст; 4)передаточно-множ. механизм; 5)индикаторная часть; 6) корпус прибора
Широкая стрелка прибора показывает Vприб,узкая Vист,кот-я получается дополнительным доворотом с помощью кулачкового механизма. В кулачковый механизм заложен закон изменения Р с Н.
Ошибки:
УС присущи инструментальные,аэродин-е и методические ошибки. Ошибка за счет изменения плотности воздуха ........ Учет ошибки за счет изменения плотности возд.произв-ся на НЛ-10,по графикам и таблицам.
Ошибка за счет изменения сжимаемости возд.
Указатели Vприб(широкая стрелка) расчит-ся с учетом сжимаемости возд. на уровне моря по стандар-й атмосф.С ростом Н ошибка возрастает. Поправка насжим-ть учит-ся по графику. КУС имеет спец. механизм для учета изменения Рст с Н. Ошибка за изменение плотности возд. будет вызываться только отклонением фактической t от стандартной
12. Хар-ка ветра. Метеоролог навигац ветер.
Ветер- движ-е воздуха относит-но земной поверх-ти . Величина векторная и хар-ся направлением(δ) и V.
δ – измер-ся от того же меридиана от которого изм-ся курс сам-та.
δу =δ+180(+/-ΔА)
δи =δ+/-180
δм =δ+/-180-(+/-Δм)
для оценки влияния ветра по маршруту полета ВС вводится понятие эквивал-ый ветер
