

8 Розрахунок потужності та вибір електродвигунів для привода ковальсько-пресових машин
Відмінність пресів від молотів полягає у тому, що деформація металу на пресах здійснюється поступовим тиском, а не ударом. Ковальські молоти та преси працюють у режимі різко змінного навантаження, коли періоди максимального моменту чергуються з холостим ходом (рис. 8.1, а).
Преси поділяють на 2 основних види: гідравлічні (в яких використовується у якості робочої рідини вода під тиском 20 – 30 МПА, а у важких пресах – до 50 – 60 МПА) і механічні з електроприводом.
У механічних пресах рух від двигуна до повзуну передається кривошипно-шатунним механізмом, ексцентриками, фрикційною або рейковою передачею тощо. В приводах таких пресів застосовуються всі існуючі види механічного та електричного регулювання швидкості у діапазоні до 4 : 1 (асинхронні двигуни з переключенням полюсів, безступінчасте регулювання за допомогою зміни кутової швидкості двигунів постійного та змінного струму, коробки швидкостей, механічні варіатори, тощо).
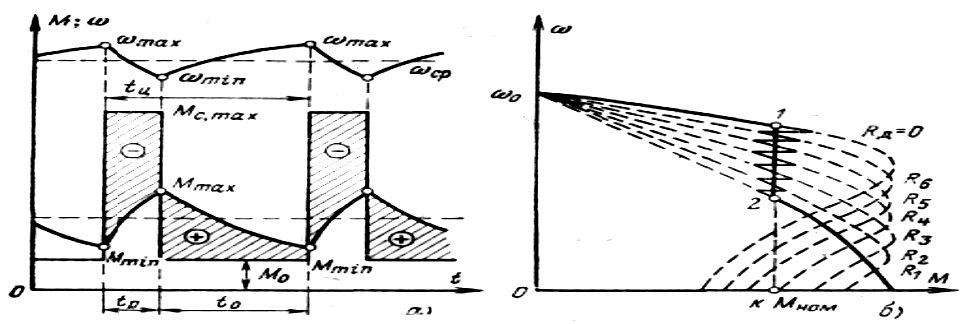
Рисунок 8.1 – Навантажувальні графіки маховикового привода (а) і
характеристики двигуна з контакторним регулятором ковзання (б)
Електродвигуни ковальсько-пресових машин працюють у тривалому, повторно-короткочасному та короткочасному режимах.
Для вирівнювання навантаження електродвигуна, в системі привода ковальсько-пресових машин штучно збільшують момент інерції, шляхом встановлення маховика на швидкохідному валу привода. У періоди зниження навантаження і холостих ходів електродвигун працює на маховик, у якому накопичується кінетична енергія. В періоди піків навантаження кутова швидкість двигуна знижується, і частина навантаження зменшується за рахунок енергії маховика.
При наявності графіка навантаження Mc = f(t) механізму, що працює з ударним навантаженням (рис. 8.2, а), і відомому значенні роботи А, яка здійснюється за один удар (хід), потужність двигуна можна визначити за середньо-статичним моментом наступним чином [7].
Розраховують максимальний момент, Н м, (пік навантаження) на валу двигуна
![]() , (8.1)
, (8.1)
де А – робота, яка здійснюється за один хід, Дж;
![]() – розрахункова кутова швидкість при
ударі, рад/с;
– розрахункова кутова швидкість при
ударі, рад/с;
t1 — тривалість удару, с.
Визначають середнє значення моменту, Н м,
 , (8.2)
, (8.2)
де М0 і t0 — момент і час холостого ходу механізму (див. рис. 8.2, а).
Тривалість циклу, с, розраховують за формулою:
![]() , (8.3)
, (8.3)
де k – кількість ходів преса за хвилину.
Тривалість холостого ходу, с:
![]() . (8.4)
. (8.4)
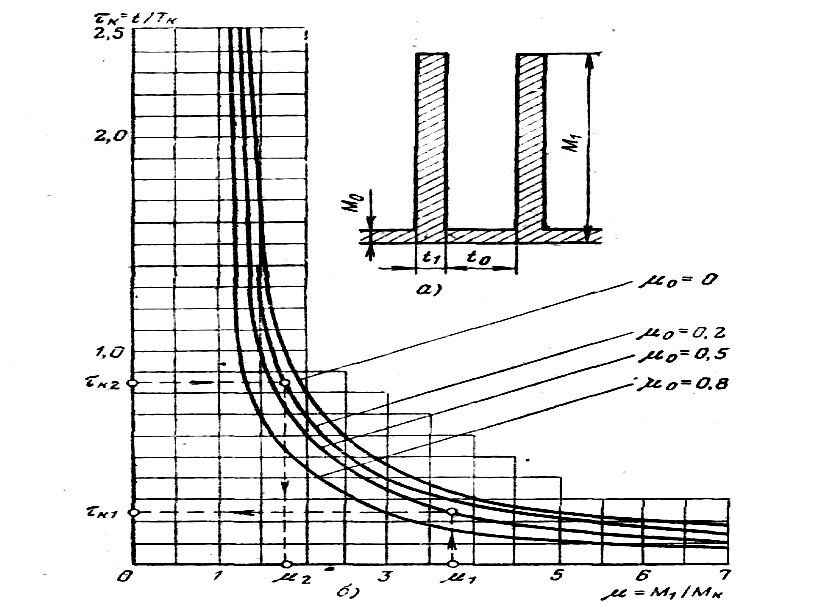
Рисунок 8.2 – Графік навантаження механізму (а) і розрахункові криві для
перевірки двигунів пресових машин на динамічну стійкість (б)
Розраховується середня розрахункова потужність двигуна, кВт
![]() . (8.5)
. (8.5)
Потужність двигуна, кВт, вибирається з урахуванням коефіцієнта запасу
![]() . (8.6)
. (8.6)
Асинхронні двигуни з короткозамкненим ротором вибираються за каталогом [3, 4, 20], так, щоб забезпечити найменші втрати в електродвигуні та найменші витрати електроенергії за цикл роботи. Ці умови забезпечуються при використанні двигунів з номінальним ковзанням 10 – 15 % (спеціальні асинхронні електродвигуни з підвищеним ковзанням типу 4АС).
Далі обраний двигун варто перевірити на перевантаження:
![]() . (8.7)
. (8.7)