

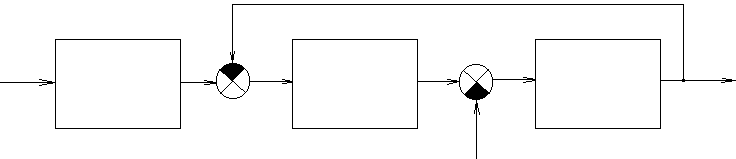
Условные обозначения на схеме:
ЗИ – задатчик интенсивности
РЧ – регулятор частоты
РН – регулятор напряжения
ФП – функциональный преобразователь
ПЧ – преобразователь частоты
ДТ – датчик тока
АД – асинхронный двигатель
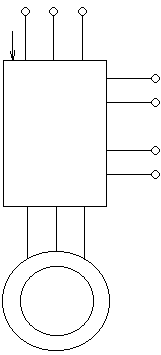
3. Выбор комплектного преобразователя и датчиков координат электропривода.
По каталогу выбираем преобразователь частоты фирмы Siemens - 11CX4 с габаритами 157515238 (16кг) и следующими данными :
P = 11 кВт
Iст = 24 А
Iст.max = 36 А
Степень защищённости и исполнение - IP 21/54.
Выбор датчика тока производим в следующем порядке :
Выбор трансформатора тока
I1ТТн I1н (Iян)
I1ТТн = 25А ; I2ТТн = 5А
Выбираем трансформатор типа И512, класс точности 0,05, номинальная вторичная мощность Р2н = 15 ВА
Коэффициент трансформации Ктт = I1ТТн/ I2ТТн = 25/5 = 5
Коэффициент датчика тока Кдт = Rтт/Ктт = 0,6/5 = 0,12
Rтт = Р2н/I2н2 = 15/25 = 0,6
Номинальное значение напряжения датчика тока Uдт=КдтIян=0,1222,5=2,7В
Максимальное значение Uдтmax = КдтIян2.5 = 0,1222,52,5 = 6,75В
Так как максимальное значение сигнала датчика тока – 6,75В, то необходимо ввести в схему усилитель. Максимальное значение Uдт должно быть в пределах 8В.
Определим коэффициент усиления :
Ку = 8/6,75 = 1,18
Определим мощность резистора Rтт, исходя из номинального тока вторичной обмотки трансформатора тока:
Ртт = I2TTнRтт = 250,6 = 15
Выбираем R1 = 10кОм
Ку = R2/R1 = 1,15 R2 = 1,1510 = 11,5 кОм
Разработка математической модели автоматизированного электропривода
Характеристики должны соответствовать заданным условиям погрузки и разгрузки. Поскольку операции чередуются, характеристики должны изменяться либо искусственным путем ручного или автоматического управления параметрами , либо благодаря свойству самоуправления. Все агрегаты в необходимой мере свойствами самоуправления не обладают, поэтому характеристики необходимо изменять искусственно при помощи систем автоматического управления, так как при ручном управлении его необходимое качество не обеспечивается. Системы управления должны непрерывно обеспечивать такие характеристики агрегатов, при которых производительность крана максимальна.
Математическое описание процессов электромеханического преобразования энергии наиболее удобно получать в синхронных осях -, при этом синусоидально изменяющиеся реальные переменные машины преобразуются в постоянные величины, характеризующие проекции изображающего вектора на синхронно с ним вращающиеся координаты оси -. Система координат u- произвольная ортогональная, вращающаяся относительно неподвижного статора со скоростью к.
М![]() атематическая
модель двух фазного асинхронного
двигателя в осях u-
имеет вид:
атематическая
модель двух фазного асинхронного
двигателя в осях u-
имеет вид:
ааааааааа![]()
к – скорость системы координат;
i,iu – составляющие тока;
,u – потокосцепления;
R1 – сопротивление статора;
M – электромагнитный момент двигателя;
L1,L2 – магнитные индукции статора и ротора;
L12 – взаимоиндукция;
U1- напряжение на статоре.
Все переменные этой модели меняются с частотой тока статора.
Имитационная модель двух фазного асинхронного двигателя в осях - имеет вид:
ggggg
fffffff
Динамические свойства системы ПЧ-АД как объекта управления менее благоприятны, чем динамические свойства регулируемых электроприводов постоянного тока, в связи с отсутствием независимого канала регулирования потока, аналогичного обмотке возбуждения двигателя с независимым возбуждением. Так, при питании от источника напряжения потокосцепления 1,2,м сложно зависят от напряжения U1, частоты f1 и абсолютного скольжения sа.
Определим коэффициенты К1,К2,К3,К4,К5,К6, для этого рассчитаем необходимые параметры:
- индуктивность статора
![]()
индуктивность ротора
![]()
взаимная индукция
![]()
- эквивалентная индуктивность цепи статора
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Структурная схема линеаризованной системы ПЧ-АД приведена на рисунке 4.1.
Uу,ч 2kу,ч 0 1
 рп
1+Тэр
Тмр
рп
1+Тэр
Тмр
Мс
Рис. 4.1.
Параметры и Тэ в этой структуре должны соответствовать требуемому режиму работы электромеханического преобразователя 1=const,2 =const, м=const. Для поддержания потока на на заданном уровне при этих условиях необходимо регулирование его по отклонению, либо по принципу компенсации. В последнем случае управление напряжением Uу,н (рис.4.2) реализуется на основе известной взаимосвязи между м управляющими воздействиями U1 и возмущающими факторами f1 и sа.
 ~Uс,fс
~Uс,fс
iс
Uу,н
ПЧ
(ИН)
Uу,ч
U1max=kуUу,н
f1=kу,чUу,ч АД
Рис.4.2.
В схеме используется магнитно-динамическое торможение с Rд=5R1, сначала за счёт затухания магнитного потока магнитное торможение, затем при подключении Rд происходит динамическое торможение.