

МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
ФГБОУ ВПО «САРАТОВСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ ИМЕНИ ГАГАРИНА Ю.А.»
БАЛАКОВСКИЙ ИНСТИТУТ ТЕХНИКИ, ТЕХНОЛОГИИ И УПРАВЛЕНИЯ (ФИЛИАЛ)
ФАКУЛЬТЕТ ИНЖЕНЕРНО-СТРОИТЕЛЬНЫЙ
КАФЕДРА УПРАВЛЕНИЕ И ИНФОРМАТИКА В ТЕХНИЧЕСКИХ СИСТЕМАХ
Реферат
по дисциплине «Элементы и устройства СУ»
исполнительные, линейные, шаговые АСИНХРОННЫЕ дВигатели
Выполнили: ст. гр. УИТ-41
Кузнецов Е.
Михеева А.
Музорова Т.
Мясникова А.
Хасинова Г.
Проверила: Рогова М.В.
2013
1АСИНХРОННЫЕ ИСПОЛНИТЕЛЬНЫЕ ДВИГАТЕЛИ
В системах автоматики находят широкое применение асинхронные исполнительные двигатели. Они предназначены для преобразования электрических сигналов, поступающих на его обмотки, в механическое вращение, осуществляющее определенное воздействие на соответствующие элементы автоматических устройств.
Асинхронные исполнительные двигатели выполняются с короткозамкнутым ротором и имеют на статоре две обмотки, магнитные оси которых сдвинуты в пространстве на электрический угол, равный 90°. Одна из обмоток статора, называемая обмоткой возбуждения ОВ, постоянно подключена к напряжению U1 = UB (см. рис.1). Другая обмотка, называемая обмоткой управления ОУ, подключается к напряжению UУ, которое может изменяться или численно (см. рис. 1,а), или по фазе (по отношению к UB) (см. рис. 1,б). В зависимости от напряжения, подводимого к обмотке управления, и его фазы изменяется частота вращения ротора исполнительного двигателя. В первом случае управление двигателем называется амплитудным, а во втором фазовым. Находит также применение управление, при котором у напряжения UУ изменяется как амплитуда, так и фаза. Такое управление называется амплитудно-фазовым. Во всех трех случаях регулирование частоты вращения происходит за счет образования несимметричного эллиптического магнитного поля.
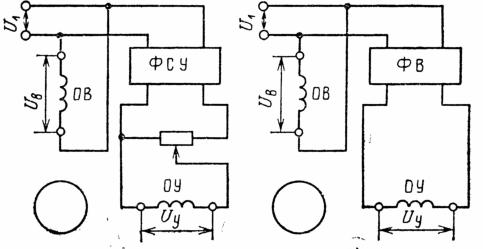
Рисунок 1- Асинхронные исполнительные двигатели
К исполнительным двигателям предъявляется ряд специфических требований, главными из которых являются:
1) отсутствие «самохода» (вращения двигателя после снятия сигнала управления);
2) возможность регулирования частоты вращения в широких пределах;
3) линейность механических и регулировочных характеристик;
4) малая мощность управления;
5) большой начальный пусковой момент:
6) устойчивость работы во всем диапазоне частот вращения;
7) быстродействие и т. д.
Для того чтобы двигатель был управляемым, т. е. чтобы его ротор вращался только при наличии сигнала в обмотке управления (UУ ≠ 0) , у него должен отсутствовать самоход. При UУ =0 и UB ≠ 0 двигатель будет включен как однофазный и для отсутствия самохода его результирующий момент, равный алгебраической сумме моментов от магнитных полей прямой М' и обратной М" последовательностей при скольжениях от 0 до 1 должен быть отрицательным, т. е. тормозным (см. граф. 1). Получить это можно, если увеличить активное сопротивление обмотки ротора исполнительных двигателей таким образом, чтобы Sкр > 1. Обычно Sкр = 2 ÷ 6. Поэтому при переходе в однофазный режим (при UУ = 0) ротор двигателя будет быстро останавливаться.
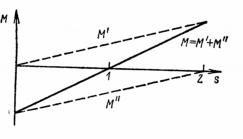
График 1- Алгебраическая сумма моментов от магнитных полей
Увеличение активного сопротивления обмотки ротора способствует также получению более близких к линейным механических и регулировочных характеристик, расширению диапазона регулирования частоты вращения, устойчивости работы и т.д. Однако при увеличении активного сопротивления обмотки ротора возрастают электрические потери в этой обмотке и снижается КПД двигателя.
Асинхронные исполнительные двигатели выпускаются на небольшие мощности и имеют несколько разновидностей в зависимости от выполнения ротора: с обмотки в виде беличьей клетки, с полым немагнитным ротором и полым ферромагнитным ротором.
Ротор с беличьей клеткой имеет обычную конструкцию. Для увеличения сопротивления клетка выполняется из материалов с повышенным удельным сопротивлением (латунь, бронза и др.). Недостатком такого ротора является большой его момент инерции, что снижает быстродействие двигателя.
Значительно
меньший момент инерции имеет полый
ротор, который выполняется в виде
тонкостенного стакана, с одной торцевой
стороны насаженного на вал (см. рис.2).
Немагнитный полый ротор 1 изготовляется
из алюминиевого сплава. Толщина его
стенок 0,2 - 1 мм. Полый ротор, закрепленный
на валу, вращается в зазоре между внешним
2 и внутренним 3 статорами. На внешнем
статоре располагаются обмотки 4, а
внутренний статор служит для уменьшения
магнитного сопротивления в контуре
главного магнитного потока. Как внешний,
так и внутренний статор собирается из
листов электротехнической стали,
покрытых лаком. Воздушным зазором в
двигателе с полым немагнитным ротором
следует считать зазор между внутренним
и внешним статорами. Он относительно
велик: 0,5-1,5 мм. Вследствие этого такие
двигатели имеют увеличенный ток холостого
хода; он составляет 0,8-0,9 номинального
тока. Это приводит к увеличению габаритов
двигателя и снижению его КПД.
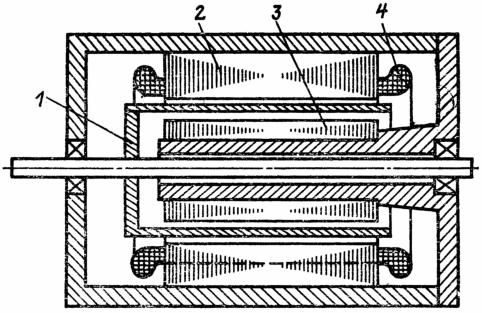
Рисунок 2- Полый ротор
Иногда полый ротор выполняется ферромагнитным (стальным). В этом случае внутренний статор не требуется, так как магнитный поток замыкается по стенкам ротора (толщина его стенок 0,5-3 мм). Конструктивно двигатели с ферромагнитным ротором получаются проще, чем двигатели с полым немагнитным ротором.
У двигателей с ферромагнитным полым ротором активное сопротивление ротора весьма значительно, так как удельное сопротивление стали больше, чем меди и алюминия: кроме того, оно возрастает из-за эффекта вытеснения тока к внешней цилиндрической поверхности ротора. Поэтому КПД таких двигателей еще ниже, чем двигателей с полым немагнитным ротором. Уступают они им и по быстродействию. Иногда для уменьшения активного сопротивления ротора производят его омеднение.
2Шаговые двигатели
В схемах автоматики, телемеханики и вычислительной техники наряду с автоматическими системами непрерывного действия, которые выполняются с помощью рассмотренных выше обычных двигателей, широко применяются системы дискретного (импульсного) действия. В таких системах используются специальные исполнительные двигатели, которые получили название шаговых.
Шаговые двигатели - это электромеханические устройства, которые преобразуют электрические импульсы напряжения управления в дискретные (скачкообразные) угловые и линейные перемещения ротора с возможной его фиксацией в нужных положениях.
Первые шаговые двигатели изготовлялись в виде электромагнита, приводящего во вращение храповое колесо (рис. 19.1), которое за одно включение электромагнита под напряжение (за один такт) перемещалось на вполне определенный угол - шаг, величина которого определяется величиной зубцового шага храпового колеса.
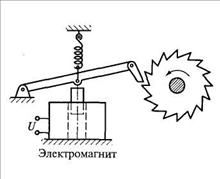
Рисунок 3-Шаговый двигатель с электромагнитом и храповиком
Для обеспечения реверса на валу двигателя устанавливалось два храповых колеса, повернутых на 180° друг относительно друга, и двигатель снабжался двумя электромагнитами. Несмотря на наличие ряда недостатков храповых шаговых двигателей, они и в настоящее время находят довольно широкое применение в схемах автоматики.