

Министерство образования и науки
Российской Федерации
ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
«САМАРСКИЙ ГОСУДАРСТВЕННЫЙ АЭРОКОСМИЧЕСКИЙ УНИВЕРСИТЕТ им.академика С.П. Королева»
(национальный исследовательский университет
Тахогенератор.
Способы определения скорости вращения
Самара 2013
Министерство образования и науки
Российской Федерации
ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
«САМАРСКИЙ ГОСУДАРСТВЕННЫЙ АЭРОКОСМИЧЕСКИЙ УНИВЕРСИТЕТ им.академика С.П. Королева»
(национальный исследовательский университет
Тахогенератор.
Способы определения скорости вращения
Методические указания к лабораторной работе
Самара 2013
Составитель В.Н. Астапов
УДК 621.396.6.001.4 (075)
Астапов В.Н. Тахогенератор. Способы определения скорости вращения.: [Текст] Методические указания к лабораторной работе. — Самара: СГАУ, 18 с.
Методические указания содержат подробное описание лабораторной работы. Предназначены для студентов дневного и вечернего отделений специальности 220700. 62 для изучения способов определения скорости вращения вала двигателя, а также для получения студентами практических навыков в проведении измерений и анализе их результатов.
Лабораторная работа рассчитана на четыре академических часа.
Печатаются по решению редакционно-издательского совета Самарского государственного аэрокосмического университета имени академика С.П. Королева.
Рецензент
Тахогенератор.
Способы определения скорости вращения

![]()
Рис. 1- Тахогенератор
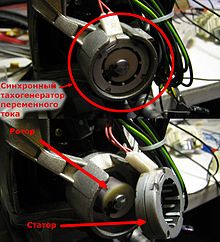
Рис. 2 - 16-ти полюсный синхронный тахогенератор переменного тока встроенный в коллекторный двигатель.
Тахогенера́тор (от др.-греч. τάχος — быстрота, скорость и генератор) — измерительный генератор постоянного или переменного тока, предназначенный для преобразования мгновенного значения частоты (угловой скорости) вращения вала в пропорциональный электрический сигнал.
Содержание
1 Принцип действия
1.1 Асинхронные тахогенераторы переменного тока
1.2 Синхронные тахогенераторы переменного тока
1.2.1 Частотный способ определения скорости вращения
1.2.2 Амплитудный способ определения скорости вращения
1.3 Тахогенераторы постоянного тока
Принцип действия
Тахогенера́тор (от др.-греч. τάχος — быстрота, скорость и генератор) — измерительный генератор постоянного или переменного тока, предназначенный для преобразования мгновенного значения частоты (угловой скорости) вращения вала в пропорциональный электрический сигнал.
Действие тахогенератора основано на пропорциональности угловой частоты вращения ротора генератора его ЭДС при постоянном значении потока возбуждения.
Тахогенераторы делятся на несколько типов: переменного тока (синхронные и асинхронные) и постоянного тока.
1.1 Асинхронные тахогенераторы переменного тока
По конструкции подобны асинхронным электродвигателям с полым короткозамкнутым ротором. На статоре такого тахогенератора расположены под углом 90° две обмотки, одна из которых (обмотка возбуждения) питается переменным током постоянной частоты и постоянного напряжения, а вторая является выходной, и к ней может быть подсоединён измерительный прибор (вольтметр, отградуированный, например, в об/мин). Так как частота выходного напряжения не зависит от частоты вращения ротора и равна частоте напряжения в катушке возбуждения, такой тип тахогенератора и называется асинхронным. А благодаря двум независимым катушкам АТГ может не только отображать скорость вращения, но и определять направление вращения изменением фазы выходного сигнала на 180° при изменении направления вращения.
1.2 Синхронные тахогенераторы переменного тока
Небольшие бесколлекторные синхронные машины с постоянным магнитом в качестве ротора и катушкой в качестве статора.
Такой тахогенератор преобразует скорость вращения ротора в переменное напряжение, амплитуда и частота которого зависит от скорости вращения ротора. Однако такой вид тахогенератора не может указать на направление вращения, что может быть существенным минусом.
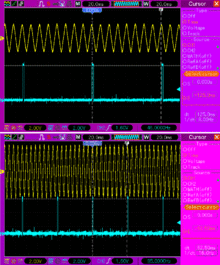
Рис. 1 - Осциллограмма, показывающая зависимость частоты и напряжения выходного сигнала синхронного тахогенератора от частоты вращения ротора. Желтый — выход 16-типолюсного тахогенератора. Синий — датчик положения ротора(1 импульс на 1 оборот). частоты вращения: сверху 8Гц, снизу 16Гц
Ротор СТГ чаще всего делают из многополюсного постоянного магнита, из-за чего на 1 оборот ротора приходится несколько периодов выходного сигнала.
Данный вид тахогенератора обладает большим сроком службы, так как в нем отсутствует коллекторно-щеточный узел. Считывание сигнала возможно двумя способами: частотным и амплитудным.
1.2.1 Частотный способ определения скорости вращения
Так как частота выходного сигнала не зависит от температуры, уменьшения магнитного потока вызванного старением и величины зазора между ротором и статором тахогенератора, то этот способ является одним из самых точных. Скорость вращения вычисляется путем определения частоты выходного сигнала и дальнейшим вычислением частоты вращения ротора по формуле:
![]()
где Frot — частота вращения ротора в Гц, Fout — частота сигнала на выходе тахогенератора, p — число пар полюсов ротора тахогенератора.
Недостатком данного метода является то, что для более точного определения частоты необходимо больше времени, и за это время частота может значительно измениться. А значит чем больше времени тратится на накопление импульсов для определения частоты, тем больше погрешность в измерениях, и тем более медленно схема управления компенсирует увеличение или уменьшение скорости вращения, что плохо сказывается на динамичности системы в целом.
Для снижения погрешности используют СТГ с бо́льшим числом полюсов, что позволяет сократить время определения выходной частоты, а значит и время реакции управляющей схемы. Определить частоту сигнала можно из накопленных и усредненных периодов нескольких импульсов. Расчет производится по формуле:
![]()
где Fout — частота сигнала на выходе тахогенератора, N — число накопленных импульсов, T — длина каждого периода.
При таком способе определения скорости вращения надо учитывать, что амплитуда выходного сигнала тоже меняется, а значит, вход детектора частоты должен быть рассчитан на низко- и высоковольтный входной сигнал, что в ряде случаев может являться недостатком, в силу усложнения схемы.