

4 Предварительный выбор двигателя по мощности.
Для предварительного выбора двигателя используем методику выбор электродвигателя по эквивалентной мощности, представленную в методическом указании по курсовому проектированию, авторами которой являются В.В. Фокин, В.А.Жигалов, страница 84.
Расчет мощности двигателя по методу эквивалентных величин основан на понятии среднеквадратичного или эквивалентного тока (мощности, момента). Переменные потери в двигателе пропорциональны квадрату тока нагрузки.
Так как мощность двигателя пропорциональна величине тока, то для расчета можно воспользоваться выражением:
 (6)
(6)
Из нагрузочной диаграммы определим эквивалентную мощность
![]()
По эквивалентной мощности определим мощность двигателя, причем мощность двигателя должна быть больше эквивалентной.
![]()
По справочнику выбираем электродвигатель для привода обкаточно-испытательного стенда: двигатель 4А200L4 У3
Паспортные данные: Pн=45 кВт; Мm/Мн=2,2; Мmin/Мн=1; Uн=380В; S=2%, nн.дв=1470 об/мин ; cosφ=0,9;Iп / Iн =7; Мп/Мн=1,4; ηн=92%; J = 45·10-2 кг*м2, IP54
Проведем проверку выбранного двигателя по пусковому моменту, так как ДВС имеют повышенное сопротивление трения в момент трогания.
![]()
где Мпуск. дв.=1,1…1,3 Мн. дв.
– пусковой момент двигателя, Н*м; Мтр.м.
– момент трогания машины, Н*м;![]() - коэффициент, учитывающий изменения
напряжения на клеммах рабочего двигателя
(
=0…0,5)
- коэффициент, учитывающий изменения
напряжения на клеммах рабочего двигателя
(
=0…0,5)
![]()

0,35 > 0,088 – условие выполняется, следовательно двигатель выбран верно.
 5.
ОПРЕДЕЛЕНИЕ ПРИВЕДЕННОГО МОМЕНТА
ИНЕРЦИИ СИСТЕМЫ ДВИГАТЕЛЬ – РАБОЧАЯ
МАШИНА.
5.
ОПРЕДЕЛЕНИЕ ПРИВЕДЕННОГО МОМЕНТА
ИНЕРЦИИ СИСТЕМЫ ДВИГАТЕЛЬ – РАБОЧАЯ
МАШИНА.
Инерционная характеристика машины представляет собой данные о величине момента инерции машины и законов его изменения от различных факторов. Величина момента инерции машин определяется массами движущихся деталей и грузов и радиусом инерции. Приведенный к валу момент инерции зависит также от кинетической характеристики системы двигатель – машина.
Приведенные к валу электродвигателя момент инерции машины определяется, исходя из равенства запасов кинетической энергии до и после приведения.
![]() (7)
(7)
где :k=1,05…1,3 — коэффициент, учитывающий момент инерции механической передачи;
Jм, — момент инерции рабочей машины, кгּм2;
i=ω/ωм =1— передаточное отношение механической передачи от двигателя к исполнительному органу вращательного движения,
В данном случае момент инерции двигателя внутреннего сгорания принимается равным моменту инерции электродвигателя.
Отсюда следует, что с учетом выше изложенных условий момент инерции системы будет равен:
![]()
 6.
РАСЧЕТ И ПОСТРОЕНИЕ МЕХАНИЧЕСКОЙ
ХАРАКТЕРИСТИКИ.
6.
РАСЧЕТ И ПОСТРОЕНИЕ МЕХАНИЧЕСКОЙ
ХАРАКТЕРИСТИКИ.
1.Механическая характеристика асинхронного двигателя строится по каталожным данным (по пяти точкам).
Первая точка (точка холостого хода)
М=0,
![]() ω0=0,105
nс.
ω0=0,105
nс.
где nс – синхронная частота вращения ротора двигателя, об/мин.
![]()
Вторая точка (точка номинального момента).
![]() (8)
(8)
где Мном – номинальный момент двигателя, Н*м
Рном – Номинальная мощность, кВт.
ωном – угловая скорость, рад/с

Третья точка (точка максимального момента).
Мкр=µкр Мном
где µкр – кратность критического момента, µкр=2,2;
![]()
где Sкр – критическое скольжение
Критическое скольжение определим по выражению
Четвертая точка (точка минимального момента)
![]()
где µмин – кратность минимального момента, µмин=1
Пятая точка (точка пускового момента)
![]()
где µпуск – кратность пускового момента, µпуск=1,4
![]()
Т1 |
М=0 |
ω = ω0=157,5рад/с |
Т2 |
М=Мн=0,292
|
ω = ωн=154 рад/с |
Т3 |
М=Мкр=0,642 |
ω = ωкр=138,6 рад/с |
Т4 |
М=Мmin=0,292 |
ω = ωmin=22 рад/с |
Т5 |
М=Мпуск=0,41 |
ω =0 рад/с |
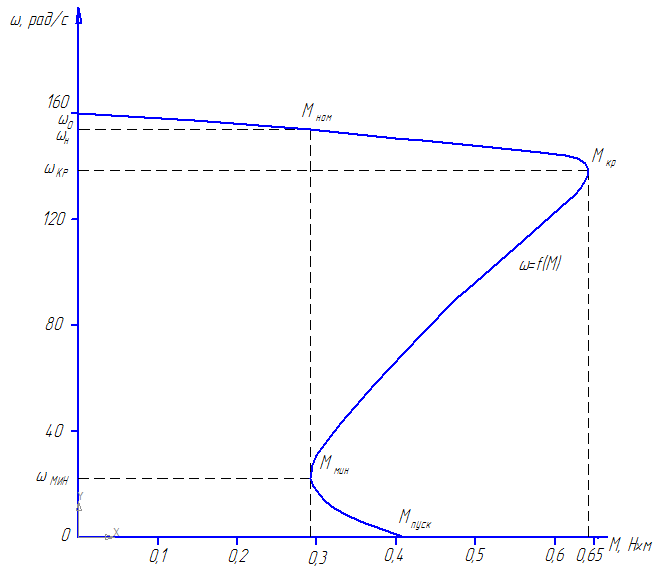
Рис.4 Естественная механическая характеристика
 (15)
(15)
где: Мтр — момент трогания механизма;
Мсн — момент сопротивлении при номинальной угловой скорости;
Х — показатель степени.Х=0
Мс.=МСН =204,03Н м.
3.Находим динамический момент Мдин графическим способом.
Мдин=Мдв-Мс (16)
4.Заменим график Мдин прямоугольниками (ломанной линией). Стороны прямоугольников параллельные оси абсцисс дают значение Мдин.
Стороны, параллельные от ординат показывают значение приращения скорости Δω.
5.Из точки 0 проводим окружность радиусом Мдв , делаем насечку на оси ординат .Остальные построения проводятся аналогично
6. Определим масштаб по оси времени для чего применим уравнение движения электропривода.
 (17)
(17)
 Преобразуем
выражение (17) в выражение масштабов тех
же величин
Преобразуем
выражение (17) в выражение масштабов тех
же величин
![]() (18)
(18)
где: µJ – масштаб к
моменту инерции,
![]()
µω – масштаб к частоте вращения,
![]()
µм – масштаб к моменту
динамическому,
![]()
Время разгона :
Так как tразг =0,5с, то пуск двигателя будет легким.
Рис. 4. Механическая характеристика электропривода