

is a combination of a (1) position control and (2) heading control system:
DP position control system uses the vessel’s Рosition Measurement Equipment (PME) and operator commands as inputs. The system then provides commands to the thrusters to maintain the position of the vessel at the desired location. This is called a feedback control system.
DP heading control system uses the vessel’s gyrocompass as the input to maintain the heading of the vessel in response to the external forces and operator commands.
В оборудование судов с СДП входят несколько гребных винтов и подруливающие устройства, электростанция судна, навигационных систем и управляющих ЭВМ с учетом присутствия оператора (рис.1). ЭВМ на мостике получает данные о положении судна (пеленг, дистанцию, отклонение от заданного положенииия или координаты) от датчиков различных систем определения положения судна (Position Reference System - PRS) и с помощью команд на главный двигатель и подруливающие устройства автоматически удерживает судно в заданной позиции.
1.3 Классы и типы судов и судовых сдп
Системы динамического позиционирования (СДП) используются на оффшорных судах:
Буровыми судами для обеспечения добычи нефти на больших глубинах (до 1000 - 3000 м).
Судами для водолазных работ.
Судами для подводных работ.
Судами для различных видов съемок, промеров и т.п.
Танкерами при приеме (сливе) нефтепродуктов с терминалов, нефтяных платформ, морских ледостойких стационарных платформ (МЛСП) и т.п.
Плавучими нефтехранилищами (суда типа FSO, FPSO);
Судами для постановки мертвых якорей.
Полупогружными платформами.
Плавкранами и строительными баржами.
Исследовательскими судами.
Судами для прокладки и ремонта кабеля.
Судами для пробивки каналов в подводных скалах.
Судами для подводного траления и рытья шахт.
Дноуглубительными судами.
Судами-снабженцами, передающими снабжение и экипажи на нефтяные, буровые и др. платформы на шельфе.
Судами, производящими добычу твердых полезных ископаемых (конкрементов) на шельфе с большими глубинами.
Пассажирскими судами.
Плавучими гостиницами.
Плавающими платформами для запуска космических ракет.
Военными кораблям для выполнения боевых заданий.
Для обеспечения высокой надежности СДП должна сочетать в себе комбинацию:
мощности;
маневренности;
навигационной обеспеченности и
управления от ЭВМ.
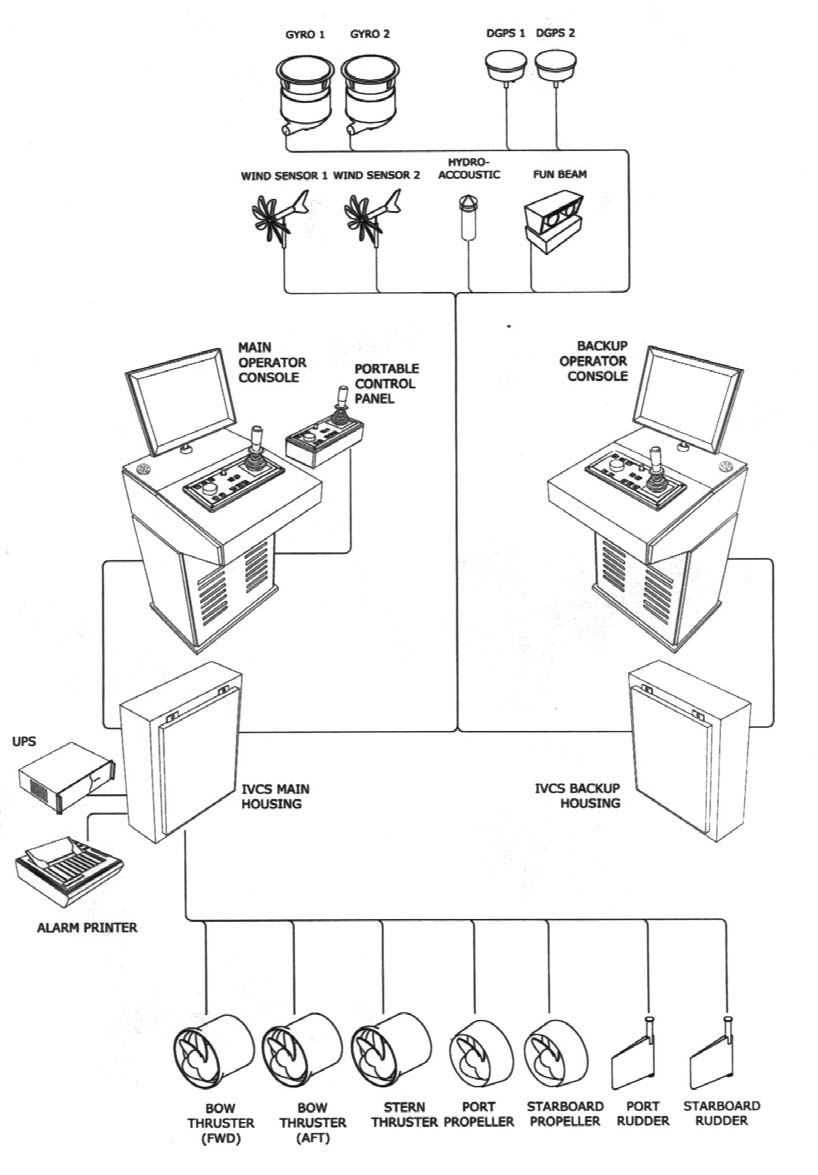
Рис.2. Схема комплектации СДП для судна 2-го класса.
При использовании систем динамического позиционирования (СДП) управление судном осуществляется по трем осям, изменение координат которых происходит под влиянием поперечного и продольного смещения, а также и отклонения от курса. Центр этих осей размещается в т.н. контрольной точке (в пределах судна), известной как центр вращения (Pivot Point). Он может быть расположен в различных местах - в центре массы судна или на некотором расстоянии от него в диаметральной плоскости судна.
Главным элементом управления (контроля) СДП является компьютер (компьютеры). Их количество зависит от требуемой точности и надежности динамического позициониро-вания, что, в свою очередь, определяет и класс оборудования.
СДП с низкой требовательностью к сохранению точности места имеют суда 1-го класса оборудования.
Более высокие требования к точному удержанию судна в заданном месте должны отвечать 2 и 3 классу оборудования. Для 2-го класса оборудования основное управление СДП осуществляет один компьютер, а второй является резервным (рис 2). В 3-м классе оборудования применяют, как минимум, три ЭВМ, из которых, по крайней мере, одна должна находиться в отдельном помещении.
The following three equipment classes for DP vessels have been defined by IMO in MSC Circular 645:
Equipment Class 1 - loss of position may occur in the event of a single fault.
2. Equipment Class 2 - loss of position should not occur from a single fault of an active component or system such as generators, thruster, switchboards remote controlled valves etc but may occur after failure of a static component such as cables, pipes, manual valves etc.
3. Equipment Class 3 - loss of position should not occur from any single failure including a completely burnt fire sub-division or flooded watertight compartment. A single fault includes a
single inadvertent act by any person (“human factor”) on board the DP Vessel.
Чтобы исключить потерю места судна с ДП для каждого класса предусмотрены следующие уровни резервирования (дублирования):
Class 1 - резервирование (дублирование) не требуется;
Class 2 - резервирование (дублирование) для всех активных компонентов СДП;
Class 3 - резервирование (дублирование) активных и статических компонентов СДП, а также их физическое разделение.
Position Reference Systems (PRS)
Динамическое позиционирование отличается от традиционной навигации. Традиционные радионавигационные системы бывают недостаточно точными (например, Decca Navigator, Loran-С, GPS без дифференциальных поправок).
Требования потребителей при обеспечении общего мореплавания
РАЙОН ПЛАВАНИЯ |
ЦЕЛОСТНОСТЬ |
УРОВЕНЬ ПАРАМЕТРОВ ОБЕСПЕЧЕНИЯ |
Интервал между обсервациями, с |
||||||
Точность определения места, м |
Предел подачи сигнала предупреждения, м |
Время до сигнала предупреждения 2, с |
Риск целостности за час |
Доступность за 30 суток, % |
Непрерырвность за 3 часа, % |
Зона действия |
|||
Океан |
10 |
25 |
10 |
10-7 |
99,8 |
НП1 |
Глобальная |
1 |
|
Прибрежное плавание |
10 |
25 |
10 |
10-7 |
99,8 |
НП1 |
Глобальная |
1 |
|
Подход к порту и узкости |
10 |
25 |
10 |
10-7 |
99,8 |
99,97 |
Региональная |
1 |
|
Порт |
1 |
25 |
10 |
10-7 |
99,8 |
99,97 |
Локальная |
1 |
|
Внутренние водные пути |
10 |
25 |
10 |
10-7 |
99,8 |
99,97 |
Региональная |
1 |
|
Минимальные требования морских потребителей для координирования |
|||||||||
Буксиры и толкачи |
1 |
2,5 |
10 |
10-7 |
99,8 |
99,97 |
Локальная |
||
Ледоколы |
1 |
2,5 |
10 |
10-7 |
99,8 |
99,97 |
Локальная |
||
Автоматическая швартовка |
0,1 |
0,25 |
10 |
10-7 |
99,8 |
99,97 |
НП |
||
Требования морских потребителей при маневрировании и управлении движением |
|||||||||
Гидрография |
1-2 |
2,5-5 |
10 |
10-7 |
99,8 |
- |
Локальная |
||
Дноуглубительные работы |
0,1 |
0,25 |
10 |
10-7 |
99,8 |
- |
Дноуглубительные работы |
||
Прокладка кабелей и трубопроводов |
1 |
2,5 |
10 |
10-7 |
99,8 |
- |
Прокладка кабелей и трубопроводов |
||
СКП определения места: 1) по трем гирокомпасным или радиолокационным пеленгам, трем радиолокационным расстояниям, радиолокационным пеленгу и расстоянию, гирокомпасному пеленгу и радиолокационному расстоянию, РНС "Декка", "Марс-75", "Лоран-C" и "Чайка" с фиксацией фазы в приемоиндикаторе при средних условиях измерений каждым способом составляет 0,1-0,3 мили, при худших условиях — 0,2-0,5 мили; 2) по высотам светил — 1-3 мили.
При использовании приемоиндикатора СНС в океанах и открытых морях погрешность обсервации составляет 0,3—0,8 мили, а погрешность счислимого места равна 0,8-1,2 мили при средних интервалах между обсервациями порядка 1 ч. При увеличении интервалов между обсервациями до 2 ч погрешность счислимого места достигает 1,5-3,0 мили. В прибрежных районах погрешности обсервации и счислимого места могут быть в 2 раза больше.
В свою очередь, эксплуатационные требования к всемирной радионавигационной системе (для судов со скоростью < 30 узлов) согласно резолюции ИМО А. 953 (23) следующие - огрешность определения места с вероятностью не менее 95%:
1.Плавание на входах в порты, подходах к портам и в прибрежных водах с высокой интенсивностью судоходства и(или) высоким уровнем риска - 10 метров.
2. Плавание в океанских водах - 100 метров.
Таким образом, СДП находится между традиционными и высокоточными системами определения координат (например, геодезическими). Для этого должны применять навигационные системы, позволяющие получать обсервованное место с высокой точностью. Кроме того, судно с СДП должно быть способным удерживать свое относительное положение (позицию) в пределах нескольких метров, а то и менее метра в заданном месте «установки».
В СДП используют, по крайней мере, восемь различных систем определения координат (абсолютные) и положения (относительные) судна. Ниже приведены некоторые из СДП, используемые в настоящее время на ОСДП:
DGPS - дифференциальные спутниковые;
Micro-Fix - фазовая;
Micro-Fix и Hyper-Fix - импульсно-фазовые радионавигационные;
Artemis – радиолокационная;
San Beam (сканирующий луч) – оптическая лазерная;
Taut Wire (туго натянутая проволока) – механическая;
TrackLink - гидроакустическая.
Средние типичные характеристики систем определения места и положения судов с СДП см. в Руководстве по DPS №2 - стр.46.
При динамическом позиционировании важно, чтобы в любое время использовалось больше, чем одна систему определения места и положения судна. Для 2 и 3 классов оборудования необходимо использовать минимум три системы определения места судна «методом наилучшего приближения».
1. В настоящее время, после отмены со стороны США ограничений к точности дифференциальных спутниковых систем DGPS для коммерческих пользователей, с их помощью координаты места судна можно получить с точностью до ±1-3 м (См. Руководство по DPS №2 - стр.51).
Системы РНСС «Навстар» обеспечивают точность до ±10 м.
2. Импульсно-фазовая радионавигационная система СДП Micro-Fix действует на расстояние до 80 км. Точность определения места ± 1 м. Предназначена для работы гидрографических и дноуглубительных судов за пределами прямой видимости. Работает на частоте 5,48 ГГц. Состоит из подвижной станции и до 8 береговых станций. Данные передаются в двух направлениях с автоматической индикацией положения подвижного объекта. Приемо-индикатор может отображать пеленг, дистанцию, координаты и т.д.
Импульсно-фазовая радионавигационная система Hyper-Fix – очень точная СДП , предназначена для гидрографических и океанографических работ, буровых установок, дноуглубления. Работает в диапазоне частот 1,6-3,4 МГц. Дальность действия 250 км. Точность до ± 1 м, а на базовой линии менее ± 1 м. Работает система в импульсном режиме под контролем микропроцессора. Контроль работы почти полностью автоматизирован, с любой станции выполняется дистанционно.
3. Радиолокационная СДП Artemis получила наибольшее распространение (См. Руководство по DPS №2 - стр.49). Она предназначена для точного определения места подвижного объекта относительно известной неподвижной точки позволяет точно определить дистанцию и азимут на эту точку. Общая суммарная погрешность измерения дальности достигается за счет усреднения измерений до 1000 и определяется величиной ±1,5 м, и не зависит от абсолютного значения измеряемого параметра. Разрешающая способность по дистанции в динамическом режиме равна 1 м, а в статическом режиме - 0,1 м. Для достижения большей разрешающей способности в динамическом режиме - до 0,3 м, рекомендуется переходить на усреднение до 10 000 измерений. Максимальная дальность действия СПД Artemis - 1000 м, минимальная - 10 м, азимут круговой (360°). Состоит из двух почти идентичных РЛС. Одна из РЛС является подвижной, т.е. может быть установлена на любом подвижном объекте: судне, автомобиле, вертолете. Вторая РЛС стационарная, устанавливается в заранее выбранной точке с точно известными координатами. Между обеими РЛС происходит взаимный захват и устанавливается связь.
Положение оси антенны стационарной РЛС измеряют в заранее известной стационарной точке с высокой точностью датчиком углового положения (координирующим устройством). Информация о величине азимутального угла в цифровом формате передается на подвижную РЛС путем частотной модуляции СВЧ колебаний, переизлучаемых со стационарной на подвижную РЛС. Дистанцию определяют путем импульсного кодирования СВЧ излучения с подвижной РЛС. Расстояние и азимут однозначно определяют положение подвижной станции относительно стационарной.
4. Оптическая лазерная СДП San Beam состоит из вращающегося излучателя, установленного на высоте в пределах судна, соединенного с пультом управления, расположенным на мостике (См. Руководство по DPS №2 - стр.59). Оптический рефлектор (отражатель) помещают в неподвижной точке (например, на близлежащей платформе). Он переотражает лазерные импульсы, излучаемые с бортового излучателя (сканера). Расстояние определяют по времени приема переотраженных импульсов, а пеленг снимают с кодового датчика, размещенного под излучателем. СДП San Beam проста в использовании и отличается высокой точностью до ± 0,1 м. В последнее время она становится очень востребованной. К ее недостатку следует отнести малую дальность действия - 1-2 км.
5. Механическая СДП Taut Wire состоит из выносной балки, расположенной на палубе, с которой на дно опускают стальной трос с тяжелым грузом (якорем), и четырех угловых ограничивающих тросов (См. Руководство по DPS №2 - стр.47). Они определяют положение вертикального центрального троса по отношению к четырем угловым тросам, концы которых подключены на выносной балки к датчикам концевых выключателей.
Многие ОСДП оснащают двумя СДП Taut Wire, расположенными по обоим бортам. К недостаткам этой системы следует отнести следующее:
максимальная глубина ограничена 300 - 400 метрами;
подвержена влиянию сильных потоков воды;
при переходе ОСДП с одного места в другое необходимо длительное время для установки СДП Taut Wire.
Вместе с тем, эта система отличается высокой точностью и часто используется на дноуглубительных судах.
6. Гидроакустическая СДП TrackLink имеет радиус действия от 500 до 10000 м. Глубина нахождения маяка ответчика – от 300 до 1500 м. Точность позиционирования по дальности – 2%, по пеленгу – 1 град (См. Руководство по DPS №2 - стр.56-58) Судно оборудуется одной или несколькими гидроакустическими антеннами, передающими и принимающими сигналы от маяков-ответчиков. По параметрам этих сигналов компьютерный блок обработки определяет пеленг и дистанцию до маяка ответчика. Для уменьшения погрешности из-за качки в блок обработки дополнительно вводятся данные с датчика качки, установленного на судне-носителе.
Система динамического позиционирования (СДП) предназначена для:
надежного непрерывного удержания судна (плавучего технического средства) относительно заданной опорной точки по поперечным и продольным координатам и курсовому углу;
следования судна в автоматическом режиме по заранее заданной траектории.
СДП является автоматизированным комплексом, включающим в себя:
энергетическую установку;
движители и средства активного управления (подруливающие устройства);
компьютеризированную систему управления.
В состав систем управления входят пульты, предназначенные для управления движением и динамическим позиционированием судов и подачи управляющих сигналов на входы локальных систем управления приводами винторулевых колонок, гребных электродвигателей и подруливающих устройств.
Система управления обрабатывает непрерывно поступающую информацию от систем ориентации и датчиков, вырабатывает управляющие сигналы в энергоустановку и движительно-подруливающий комплекс, при помощи которых компенсируется суммарный вектор сил внешнего воздействия на судно (ветра, течений, волнения). Для качественного удержания СДП всегда использует информацию от систем ориентации, работающих на разных физических принципах - гидроакустической, радио-, спутниковой, электромеханической, лазерной и др.
Навигационная информация поступает от:
навигационного комплекса;
спутниковой навигационной системы;
гидрометеорологического комплекса;
информационно-управляющего комплекса;
движительно-рулевого комплекса;
электро-энергетической системы.
Система обеспечивает следующие режимы управления:
управление процессами судовождения и маневрирования на переходах в район проведения работ;
координированное управление динамическим позиционированием в точке;
координированное управление движением судна под активными средствами по заданной траектории;
управление динамическим позиционированием при погрузочно-разгрузочных работах в открытых акваториях моря;
режим для тренировки личного состава.
Функции управления:
Координированное управление:
перемещением и разворотом по курсу на сверхмалых скоростях с помощью рукоятки типа Joystick и моментной рукоятки в режимах динамической стабилизации;
вектором скорости движения с помощью рукоятки типа Joystick и угловой скоростью поворота с помощью моментной рукоятки при маневрировании.
Задание режимов и параметров управления движением или позиционированием с помощью функциональной клавиатуры, рукояток типа Joystick, маркеров типа Trackbal.
Движение по маршруту, с заданной скоростью хода.
Функции моделирования:
Моделирование анализа последствий отказов подруливающих устройств или движительно-рулевой колонки с учетом тенденции усиления скорости ветра в реальном масштабе времени или в режиме Оff-Line (в ускоренном масштабе времени).
Моделирование движения с целью предсказания траектории движения при маневре с учетом инерционных свойств судна и воздействии текущих внешних сил и моментов
Бортовой тренажер.
Recommended DP Control Modes for DP Activities
The DP vessel should be equipped with suitable DP modes and features with due consideration to operational requirements, both with regard to restrictions caused by the activity and performance criteria required to execute the activity safely and successfully.
Target Follow: Enables the DP vessel to follow a moving target and is used, for example, to follow an ROV along a pipeline.
Heavy Lift: Takes account of the effects of the load transfer on the mass of the vessel and the additional lateral force, normally by reducing gain and relaxing the DP controller.
External Force Compensation: Where the measured external force acting on the vessel, which is separate from the environment, is included in the DP calculation and treated as a force feed forward. This mode is used to account for pipe tensions in a pipe layer and hawser tension in a shuttle tanker.
Fire Monitor Compensation: Used to compensate for the varying forces exerted on vessel from the fire monitors.
1.4. Международные и национальные документы по сдп
IMO (the International Maritime Organisation) MSC Circ.645 “Guidelines for Vessels with Dynamic Positioning Systems”.
IMO MSC Circ.738 “Guidelines for Dynamic Positioning System (DP) Operator Training”.
International Guidelines for the Safe Operation of Dynamically Positioned Offshore Supply Vessels. 2006
IMCA (the International Marine Contractors Association) M 103 Guidelines for the Design and Operation of Dynamically Positioned Vessels 1999
IMCA M 109 A Guide to DP Related Documentation for DP Vessels 2004
IMCA M 117 The Training and Experience of Key DP Personnel 1996
IMCA M 125 Safety Interface Document for a DP Vessel working near an Offshore Platform 1997
IMCA M 139 Standard Report for DP Vessels Annual Trials 1997
IMCA M 140 Specification for DP Capability Plots 2000
IMCA M 149 Common Marine Inspection Document 2005
IMCA M 166 Guidance on Failure Modes and Effects Analysis 2002
IMCA M 178 FMEA Management Guide 2005
IMCA C 002 Competence and Assurance Assessment 2003
Организация службы динамического позиционирования на судах РАО «Газпром», используемых при освоении морских нефтегазовых месторождений
1.5. Перечень обязательных документов по сдп, которые должны быть в помещении
службы ДП:
Руководство по эксплуатации СДП;
главные характеристики судна в части ДП;
основные применяемые условные обозначения и сокращения;
таблицы ввода параметров для регистраторов;
таблица предельных параметров окружающей среды;
батиметрическая карта района работ;
схема расположения датчиков СДП;
сектор отхода;
зоны безопасности (Capability Plot);
схема швартовки судов-снабженцев;
схема швартовки танкеров к морским ледостойким стационарным платформам (МЛСП), терминалам, приемным буям;
схемы перешвартовки танкеров в районе приемки нефтепродуктов по чистой воде и в ледовых условиях;
диаграммы способности судна;
матрицы определения рисков;
данные по FMEA;
чек-листы;
правила ведения вахтенных журналов;
заведование судовой службы ДП;
акты приема-передачи;
рейсовые отчеты.