

6.4. Двигатели с волновым ротором
Волновые двигатели (ВД) представляют собой конструктивное объединение электрической машины и волновой передачи. Особенностью таких двигателей является гибкий, деформирующийся в радиальном направлении ротор. Одна из возможных конструкций ВД приведена на рис. 6.10.
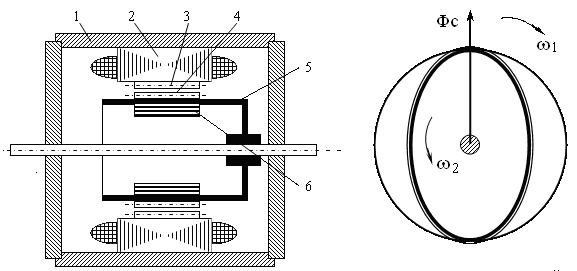
Рис. 6.10. Двигатель с волновым ротором Рис. 6.11. К вопросу о принципе действия двигателя с волновым ротором
На рис. 6.10 обозначено: 1 – корпус; 2 – статор с обмоткой, создающей вращающееся магнитное поле; 3 – жесткий зубчатый венец статора; 4–гибкий зубчатый венец ротора; 5 – ротор, выполненный в виде тонкостенного стакана; 6 – эластичный магнитопровод ротора.
При отсутствии питания ротор имеет правильную цилиндрическую форму. Его зубчатый венец не сцепляется с венцом статора. При подаче питания на обмотки статора возникает вращающееся магнитное поле, в котором на магнитопровод ротора действуют силы магнитного притяжения
F ~ ![]() (6.20)
(6.20)
Ротор деформируется, и его зубчатый венец входит в зацепление с венцом статора. Количество точек зацепления равно количеству полюсов машины (рис. 6.11).
Точки зацепления бегут с синхронной скоростью, и гибкий венец катится по поверхности жесткого. При этом он вместе с ротором медленно поворачивается в сторону противоположную вращению поля. Скорость ротора равна
![]() (6.21)
(6.21)
где zг, zж – число зубцов гибкого и жесткого венцов.
Достоинства волновых двигателей похожи на достоинства двигателей с катящимся ротором: 1) большие вращающие моменты при относительно малой массе; 2) высокие значения момента самоторможения и практически отсутствие выбега; 3) способность к частым пускам и реверсам.
Недостатком ВД следует считать сложность конструкции и технологии изготовления эластичного ротора.
Контрольные вопросы
1. Какими способами можно получить малые скорости вращения микродвигателей?
2. Построить кривую МДС для момента времени, когда ток в фазе А максимальный, а в фазе В равен нулю.
3. Перечислить все возможные значения дробного q, если Z = 18, m = 2. При каком q гармонический состав поля будет наиболее благоприятным?
4. В чем суть метода гармонической зубцовой проводимости?
5. Поясните принцип действия индукторных двигателей с осевым и радиальным возбуждением.
6. Объясните принцип действия двигателя с катящимся ротором.
7. Чем синхронный режим работы двигателя с катящимся ротором отличается от асинхронного режима?
8. Достоинства и недостатки двигателя с катящимся ротором.
9. В чем суть двигателя с волновым ротором.
7. Пьезоэлектрические микродвигатели
Пьезоэлектрическими микродвигателями (ПМД) называются двигатели, в которых механическое перемещение ротора осуществляется за счет пьезоэлектрического или пьезомагнитного эффекта [7].
Отсутствие обмоток и простота технологии изготовления не являются единственными преимуществами пьезоэлектрических двигателей. Высокая удельная мощность (123 Вт/кг у ПМД и 19 Вт/кг у обычных электромагнитных микродвигателей), большой КПД (получен рекордный до настоящего времени КПД = 85 %), широкий диапазон частот вращения и моментов на валу, отличные механические характеристики, отсутствие излучаемых магнитных полей и ряд других преимуществ пьезоэлектрических двигателей позволяют рассматривать их как двигатели, которые в широких масштабах заменят применяемые в настоящее время электрические микромашины.
Пьезоэлектрический эффект. Известно, что некоторые твердые материалы, например, кварц способны в электрическом поле изменять свои линейные размеры. Железо, никель, их сплавы или окислы при изменении окружающего магнитного поля также могут изменять свои размеры. Первые из них относятся к пьезоэлектрическим материалам, а вторые – к пьезомагнитным. Соответственно различают пьезоэлектрический и пьезомагнитный эффекты.
Пьезоэлектрический двигатель может быть выполнен как из тех, так и из других материалов. Однако наиболее эффективными в настоящее время являются пьезоэлектрические, а не пьезомагнитные двигатели. Существует прямой и обратный пьезоэффекты. Прямой – это появление электрического заряда при деформации пьезоэлемента. Обратный – линейное изменение размеров пьезоэлемента при изменении электрического поля. Впервые пьезоэффект обнаружили Жанна и Поль Кюри в 1880 году на кристаллах кварца. В дальнейшем эти свойства были открыты более чем у 1500 веществ, из которых широко используются сегнетова соль, титанат бария и др. Ясно, что пьезоэлектрические двигатели"работают" на обратном пьезоэффекте.
Конструкция и принцип действия пьезоэлектрических микродвигателей. В настоящее время известно более 50 различных конструкций ПМД. Рассмотрим некоторые из них. К неподвижному пьезоэлементу (ПЭ) – статору –прикладывается переменное трехфазное напряжение (рис. 7.1). Под действием электрического поля конец ПЭ последовательно изгибаясь в трех плоскостях, описывает круговую траекторию.

Рис. 7.1. К принципу действия ПМД