


Полевая шина
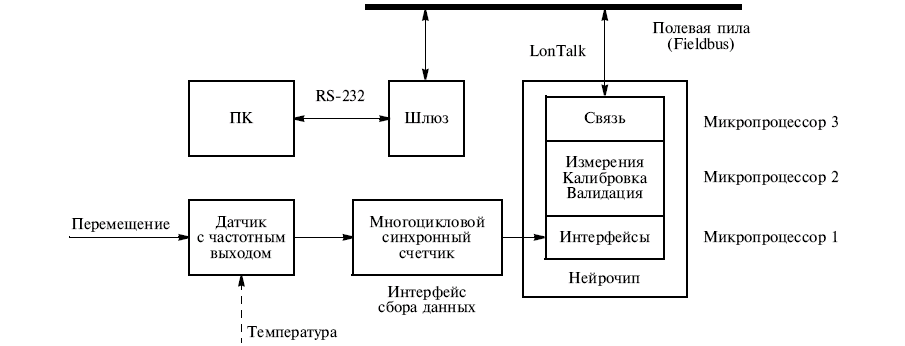
Рис.3. ИД перемещения с частотным выходом на базе полевой шины
Цветовые датчики нашли применение во многих областях, например, в электротехнической промышленности (для распознавания и распределения цветных кабелей и автоматического тестирования установленных светодиодных линеек или матриц), в текстильной промышленности (для контроля процессов окрашивания), в производстве стройматериалов (при контроле процессов смешивания) и многих др. Цветовые признаки (как измеряемые или управляемые параметры) используются в управлении технологическим процессом и при контроле качества продукции. Традиционные цветовые датчики определяют цветовые свойства объекта, но принятие решений или управление всегда основано на опыте человека. Для того чтобы придать цветовым датчикам способность принятия решений, были созданы цветовые ИД. В ряде работ рассматривается применение цветового ИД, основанного на нечетких методах. Его функциональные возможности запрограммированы на специальном языке, названном «Прототип языка лингвистических датчиков и исполнительных устройств» (Prototype of Language for linguistic Actuators and Sensors – PLICAS). Соответствующие программные коды PLICAS посылаются по сети для исполнения другой вычислительной системой. Этот подход позволяет оснащать обычные интеллектуальные приборы сложными функциональными возможностями (например, реализация в ИД функций динамической диагностики).
С помощью PLICAS программируется процесс обработки нечеткой информации. На рис.4 представлено распределение интеллектуальных функций в сети: интеллектуальная часть датчика содержит лабораторные расчеты и прочий измерительный сервис, а также исходный программный код PLICAS нечетких описаний и нечеткого агрегирования.
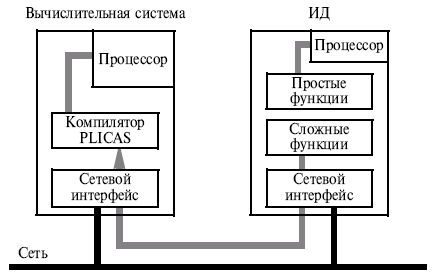
Рис.4. Структура распределенной системы на базе цветового ИД
ИД активного контроля внесли принципиально новые аспекты в широкий класс измерительных задач. Например, современные активные ИД для станков с компьютерным ЧПУ поддерживают различные виды измерений геометрической формы деталей в процессе их обработки, что позволяет улучшать оперативную коррекцию погрешностей путем подстройки параметров обработки. Внедряются и ИД смещений осей вращения (например, цилиндрические емкостные ИД смещения шпинделя). Результаты исследований показывают, что подобные датчики можно использовать в качестве эффективного и недорогого устройства оперативного контроля условий резки и состояния инструмента на заводе-автомате. Разработаны также новые методологии фрактального оценивания (в реальном времени) износа поверхностей режущих инструментов. Фрактальные размеры аттрактора динамики механической обработки могут выделяться из набора измерительных сигналов с помощью семейства методов обработки сигналов, охватывающих вейвлет-представление и разделение сигналов. Реализация данных методов, как правило, базируется на моделях рекуррентных нейронных сетей.
Благодаря своей миниатюрности, низкому энергопотреблению и простоте измерений в различных сложных приложениях широко используются датчики и исполнительные устройства на основе микроэлектромеханических систем (МЭМС). Сложность поддержки ресурсоемких вычислительных процедур обработки данных в подобных изделиях часто приводит к необходимости применения «лаконичных» эвристических алгоритмов и моделей, эффективно реализуемых на базе микро-ЭСРВ. Особо продуктивными в приложениях такого профиля считаются модели на базе наборов нечетких правил. В качестве примеров в одном из обзоров приведены интеллектуальная пишущая ручка с тремя акселерометрами, тремя датчиками силы и двумя датчиками угла наклона для верификации подписи, а также интеллектуальные наручные часы с датчиками температуры, давления, влажности и ускорения, используемыми для контроля состояния окружающей среды.
Рассмотренные выше приложения показывают, что ИД развиваются путем совершенствования процессорного элемента. В частности, использование нечетких и/или нейросетевых средств увеличивает гибкость датчика и его возможности по обеспечению самокомпенсации, самовалидации и самоорганизации (причем, все составные компоненты ИД часто интегрируются в одной микросхеме). На базе подобных ИД эффективно строятся и интеллектуальные системы сбора первичной информации. Достаточно показательным является пример системы HFCS (см. рис.5).
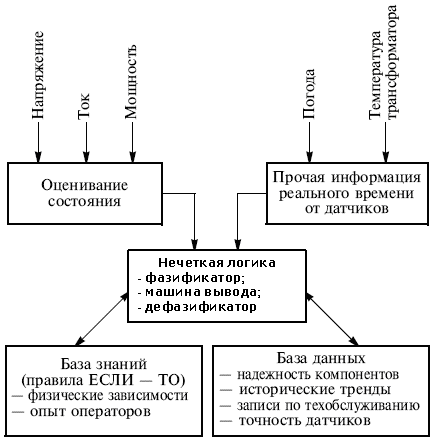
Рис.5. Архитектура системы HFSC
Гибридная нечеткая система классификации (Hybrid Fuzzy Classifier System – HFCS) предназначена для объединения информации от различных доменов энергосетей для обнаружения и идентификации аварийных угроз. Система HFCS включает в себя базу знаний, содержащую правила распознавания нормальных и нештатных режимов работы системы. Другой компонент HFCS включает базу данных, содержащую информацию о надежности устройств, точности датчиков и записях о проведенном техобслуживании.
В системе используется четыре нечетких входа: надежность датчика, среднеквадратическая погрешность, разность нагрузки и относительный возраст. Часть информации поступает от ИД. На основании нечеткого продукционного вывода система классифицирует текущую ситуацию в контролируемой электроэнергетической системе При этом HFCS значительно повышает робастность обнаружения и идентификации противоречий в сенсорных данных. Многочисленные тесты и опыт внедрения показали также высокую точность измерений.
В целом ряде практических приложений нашла отражения и идеология интеллектуальных программных агентов. Суть данного подхода заключается в разработке унифицированных программных и аппаратно-программных компонентов (агентов), обладающих способностью к решению узкого класса интеллектуальных задач и ориентированных на конкретную физическую специфику процессов измерений и первичной обработки информации. На рис.6. представлен специфический пример интеллектуального агента для автоматического техобслуживания, который применяется в центрах металлорежущих станков. Один из аспектов работы станков оценивается по сигналам от множества датчиков. Сбои прогнозируются после проведения распознавания признаков. Ожидается, что такой агент будет включен в следующее поколение станков с компьютерным ЧПУ для реализации архитектуры, представленной на рис.7 (под «объектным агентом» на рисунке понимается агент, интегрирующий всю информацию о заданном объекте, независимо от того, сколько и каких датчиков отвечает за ее получение).
Общей современной тенденцией в области развития интеллектуального оконечного оборудования можно считать переход к технологиям тесной системной интеграции отдельных интеллектуальных датчиков и исполнительных устройств в сети, способные согласованно решать единые общесистемные задачи на базе «интеллектуальных способностей» отдельных системных компонентов. Интеллектуальные сети будут охватывать ИД, исполнительные устройства, каналы связи и компоненты централизованного управления.

Рис.6. Интеллектуальный агент автоматического техобслуживания
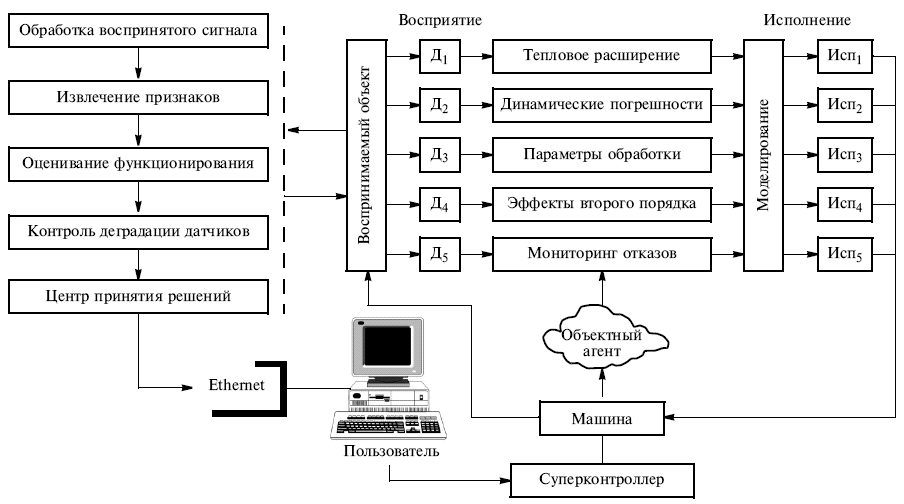
Рис.7. Архитектура кластера ИД для нового поколения станков с ЧПУ
На рис.8 представлена перспективная архитектура системы, использующей кластеры ИД.

Рис.8. Перспективная архитектура кластера ИД
Для интеллектуальных сетей рассматриваемого вида становится также актуальным внедрение идеологии plug-and-play для широкой номенклатуры датчиков и актуаторов различных классов. При этом решение задач «опознавания» и организации взаимодействия с новыми компонентами сети также становится задачей интеллектуального характера, что исходно предполагает и последующую разработку идеологии специализированных интеллектуальных агентов, способных ее решать.
К классу микро-ЭСРВ могут быть отнесены и программные компоненты (агенты, автономные модули), отвечающие за организацию интеллектуального сетевого взаимодействия на уровне низового оборудования. Показательны в этом смысле примеры создания и внедрения целостных масштабируемых интеллектуализированных платформ (аппаратно-программных) для построения иерархических распределенных АСУТП. В частности, хорошо известны подобные решения в сфере технологий «интеллектуальных зданий».
К числу наиболее «представительных» примеров в этой области можно отнести системы Continuum (Andover), Vista (t.a.c., входящая в Scheider Electric), Enterprise Building Integrators (Honeywell), scalaBACS («ДЭЙТАМИКРО») и др. В системах подобного уровня сети интеллектуальных датчиков и актуаторов объединяются в мультиагентные системы на базе интеллектуальных сетевых сервисов, которые функционально взаимодействуют и с контроллерным уровнем комплексной АСУТП, и с уровнем операторских станций и серверов данных.
Так, в обобщенной архитектуре комплекса scalaBACS (scalable Building Automation & Control System), построенного на базе распределенной управляющей сетевой платформы DDCNP (Datamicro Distributed Control Network Platform), возможна многоуровневая функциональная и информационно-программная интеграция интеллектуальных оконечных устройств, интеллектуальных средств коммуникации и интеллектуальных подсистем верхнего уровня АСУТП. В изображенном на рис.9 обобщенном примере построения промышленного решения на основе scalaBACS к интеллектуальным «нишам» относятся и сети ИД и др. «умных» оконечных устройств, и блоки централизованной обработки данных на уровне сетей сенсоров/актуаторов, и интеллектуальные межсетевые шлюзы, и подсистемы более высоких рангов (операторских станций, серверов технологических данных, видеосерверов, серверов расписаний и т.п.). В целом, в полную конфигурацию scalaBACS входит значительная номенклатура функциональных подсистем:
Система охранной сигнализации (IAS)
Система пожарной сигнализации (FAS)
Система охранно-пожарной сигнализации (IFAS)
Система блокирования сотовой связи (CCBS)
Система контроля и управления доступом (ACS)
Система SMS оповещения и управления (SNCS)
Система учета рабочего времени (TAS)
Система управления освещением (LCS)
Система инициации общей тревоги (AIS)
Система распределения информации (IDS)
Система видеонаблюдения (VCS)
Система управления электронагрузкой (ELMS)
Система единого точного времени (TMS)
Система контроля и управления доступом по расписанию (SACS)
Система вызова помощи (персонала) (HCS)

Рис.9. Пример общей архитектуры промышленного решения на базе scalaBACS
В большинстве перечисленных подсистем присутствует компонент «интеллектуального поведения». Причем, единая функциональная задача (интеллектуального плана) может быть распределена между интеллектуальными модулями различного уровня иерархии, различных территориально-компактных групп устройств и/или аппаратных подсетей, а может решаться и автономным модулем в точке «возникновения». К тому же, одна и та же задача может иметь несколько путей решения в зависимости от текущей ситуации.
По сути дела, подобные архитектуры распределенных иерархических интеллектуальных систем с возможностями гибкой функциональной, информационной и аппаратно-программной реконфигурации, являются одним из наиболее сложных случаев решения задач интеллектуализации АСУТП, при котором использование (а следовательно, и проектирование) микро-, мини-, средних и комплексных интеллектуальных подсистем различного уровня функциональной мощности становится единым технологическим процессом. Даже на уровне микро-ЭСРВ оконечных устройств данная многоуровневая схема организации взаимодействий интеллектуальных компонентов с аппаратно-программным окружением должна иметь соответствующее отображение. Однако, рассмотрение подобных задач более относится к тематике параграфа 2.4. В данном же параграфе приведенный пример иллюстрирует лишь условность выделения класса микро-ЭСРВ в наиболее сложных случаях построения распределенных, крупномасштабных и многофункциональных промышленных АСУТП, согласованно решающих широкий спектр задач интеллектуального характера.
В заключении следует также отметить, что рассматриваемый в следующем параграфе класс «мини-ЭСРВ» (ЭСРВ контроллерного уровня) в ряде случаев трудно отделить от некоторых рассмотренных в настоящем разделе объектов исследования – например, программных агентов интеллектуальных кластеров датчиков (в т.ч. – ИД) или координирующих агентов в абстрактной мультиагентной системе нижнего уровня АСУТП. Поэтому отдельные примеры, приводимые далее в определенном смысле «перекрывают» изложенный выше материал.