

ПОСЛЕ ПРОЧТЕНИЯ ЭТОЙ СТРАНИЦЫ, ЕЕ НАДО УДАЛИТЬ
Текущий файл- заготовка документа ДЗ по кинематике, которое выполняется с помощью четырех программ. Это: MS Office Word (набор текста расчетно-пояснительной записки); MS Office Excel (подготовка рисунков на основе базы графических заготовок – автофигур); MATLAB (расчет и построение графиков); КОМПАС (рисование планов положения, скоростей и ускорений механизма).
Текст (зоны), который в данном документе выделен таким цветом 3-0, НКП, студенту следует изменить на свой вариант. После этого студенту надо убрать выделение цветом.
К рисункам, которые приведены в данном документе (выделены рамкой с тенью), применимо замечание из п.2.
К формулам, которые приведены в данном документе (выделены рамкой с тенью), применимо замечание из п.3.
В результате студент набирает документ, в котором отсутствуют выделенные цветом, рамкой и тенью зоны - текст, формулы и рисунки.
В приложении студент помещает чертеж планов механизма, листинг программы и протокол работы программы.
Разрешено графические элементы ДЗ выполнять другими программными продуктами. В случае, если студент не УМЕЕТ РИСОВАТЬ НА КОМПЪЮТЕРЕ, то графические элементы ДЗ можно выполнять от руки. НО ПРИ ЭТОМ СТУДЕНТ ДОЛЖЕН СОГЛАСОВАТЬ С ПРЕПОДАВАТЕЛЕМ ОБЪЕМ РУЧНОЙ ГРАФИКИ.
ПЛАНЫ СКОРОСТЕЙ И УСКОРЕНИЙ СТРОЯТСЯ ДЛЯ ПОЛОЖЕНИЯ МЕХАНИЗМА, КОТОРОЕ ЗАДАЕТ ПРЕПОДАВАТЕЛЬ ПОСЛЕ ТОГО, КАК ОН УВИДИТ ГРАФИКИ ВРЕМЕННЫХ ЗАВИСИМОСТЕЙ.
СОСТАВ ВЫВОДИМЫХ ГРАФИКОВ ВРЕМЕННЫХ ЗАВИСИМОСТЕЙ СОГЛАСОВЫВАЕТСЯ С ПРЕПОДОВАТЕЛЕМ.
ПОСЛЕ ПРОЧТЕНИЯ ЭТОЙ СТРАНИЦЫ, ЕЕ НАДО УДАЛИТЬ
Министерство образования и науки Ураины
Национальный аэрокосмический университет им. Н.Е. Жуковского
"Харьковский авиационный институт" (ХАИ)
Кафедра теоретической механики, машиноведения
и робототехнических систем
КИНЕМАТИКА ПРИБОРНЫХ МЕХАНИЗМОВ
Расчетно-пояснительная записка к домашнему заданию
по курсу "Техническая механика"
Выполнил: студент группы 32X
Xxxxxxxx Y.Z.
(Ф.И.О)
_____________________________
(Подпись, дата)
Проверил: Шехов А.В
(Ф.И.О)
_____________________________
(подпись, дата)
Харьков 2013 содержание
1 СТРУКТУРНЫЙ АНАЛИЗ ……………………………...…………………………………..….. 3-6
2 ИССЛЕДОВАНИЕ КИНЕМАТИКИ МЕХАНИЗМА АНАЛИТИЧЕСКИМ МЕТОДОМ. МЕТОД ЗАМКНУТЫХ КОНТУРОВ ………………………………………………………..….. 7-10
3 ИССЛЕДОВАНИЕ КИНЕМАТИКИ МЕХАНИЗМА ВЕКТОРНО-ГРАФИЧЕСКИМ МЕТОДОМ. МЕТОД ПЛАНОВ СКОРОСТЕЙ И УСКОРЕНИЙ ……………….……..….. 11-15
4 СРАВНЕНИЕ РЕЗУЛЬТАТОВ ДВУХ МЕТОДОВ ………………………………..…..….. 15-16
ВЫВОДЫ …………………………………………………………………………………………..….. 17
БИБЛИОГРАФИЧЕСКИЙ СПИСОК …………………………………….…………………..….. 18
ПРИЛОЖЕНИЕ ……………………………………………..……………………………………….. 19
1 Структурный анализ
Пронумеруем на кинематической схеме механизма все его звенья, как это показано на рис.1.1. При этом все неподвижные звенья обозначим цифрой 0.
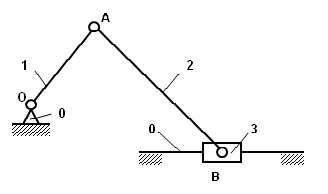
Рисунок 1.1 – Нумерация звеньев механизма
Звенья 1, 2 и 3 – подвижные звенья. Число подвижных звеньев n=3.
Звенья, обозначенные 0, – стойки, число которых n0=2.
Перечислим низшие кинематические пары (НКП), которые присутствуют в структуре нашего механизма. В списке укажем, какие звенья образуют данную НКП, ее класс и тип. Звенья механизма входят в состав следующих кинематических пар:
- 0-1, НКП, V кл., вращательная;
- 1-2, НКП, V кл., вращательная;
- 2-3, НКП, V кл., вращательная;
- 3-0, НКП, V кл., поступательная.
Число НКП V класса p5=4.
В структуре нашего механизма отсутствуют кинематические пары IV класса, поэтому p4=0.
Степень подвижности механизма w определяем по формуле Чебышева.
![]() =1.
(1.1)
=1.
(1.1)
Анализ значения полученной подвижности механизма.
Значение подвижности механизма w=1 означает следующее: в механизме можно выделить 1 ведущее звено, имеющего одну степень свободы.
В качестве ведущего звена выбираем звено 1.
Определение в структуре нашего механизма, так называемого основного механизм.
На рис.1.2 приведен основной механизм.

Рисунок 1.2 – Основной механизм
Определение структурных групп Ассура.
Звенья 2 и 3 образуют структурную группу Ассура II класса 2 порядка 2 вида.

Рисунок 1.3 – Структурная группа Ассура
В структуре нашего механизма можно выделить только одну группу Ассура. Таким образом, структурная группа, образованная звеньями 2 и 3, первая и последняя по порядку присоединения к основному механизму.
6.1. Доказательство, что выделенная группа звеньев механизма образует структурную группу Ассура.
Присоединим крайние элементы выделенной группы звеньев к соответствующим стойкам, как показано на рис.1.3.

Рисунок 1.3 – Предполагаемая структурная группа
Найдем подвижность wгр полученной механической структуры.
Число подвижных звеньев nгр=2. Число стоек n0=2. В структуре имеются следующие НКП:
- 0-2, НКП, V кл., вращательная;
- 2-3, НКП, V кл., вращательная;
- 3-0, НКП, V кл., поступательная.
Число НКП V класса p5гр=3 и число КП IV класса p4гр=0. Тогда, получим
![]() =0.
(1.2)
=0.
(1.2)
Следовательно, выделенная структурная группа звеньев является структурной группой Ассура.
6.2. Если данную группу звеньев отсоединить от нашего механизма, то от него останется ведущее звено 1 и вращательная стойка 0, которые образуют основной механизм, т.е. останется структурная единица с подвижностью исходного нашего механизма.
Обозначение характерных точек выбранной группы Ассура.
На рис.1.4 показаны характерные точки нашей группы Ассура. Приведем их обозначения:
- первая крайняя точка A2(A1) или точка А;
- средняя точка B2(B3);
- вторая крайняя точка B0.

Рисунок 1.4 – Характерные точки группы Ассура
Первая крайняя точка A2 и средняя точка B2 принадлежат одному звену 2.
Вторая крайняя точка B0 и средняя точка B2 принадлежат разным звеньям, а именно направляющей поступательной стойки 0 и звену 2 соответственно.
Образование нашего механизма путем наслоения групп Ассура к основному механизму.
На рис.1.4 показана схема образования нашего механизма.

Рисунок 1.5 – Предполагаемая структурная группа
Определим класс нашего механизма.
Класс нашего механизма равен II, а порядок равен 2.
Виды движений звеньев механизма.
- звено 1 совершает равномерное вращательное движение вокруг оси О;
- звено 2 совершает плоское движение;
- звено 3 совершает поступательное движение вдоль направляющей соответствующей стойки.