

3.1 Исходные данные для расчета.
Исходные данные приведены на Рис. 1.
Для силового расчета задана схема механизма и указана рабочая машина. Например шарнирный четырехзвенник с рабочим органом на коромысле. Или механизмом является кривошипно ползунный механизм испльзуемый в компрессоре или двигателе. При этом должны быть известны длины звеньев механизма
l0- длина стойки
l1 – длина кривошипа
l2 - длина шатуна
и др.
n - частота вращения кривошипа,
Заданной является диаграмма внешней нагрузки на рабочем органе, коромысле или поршне.
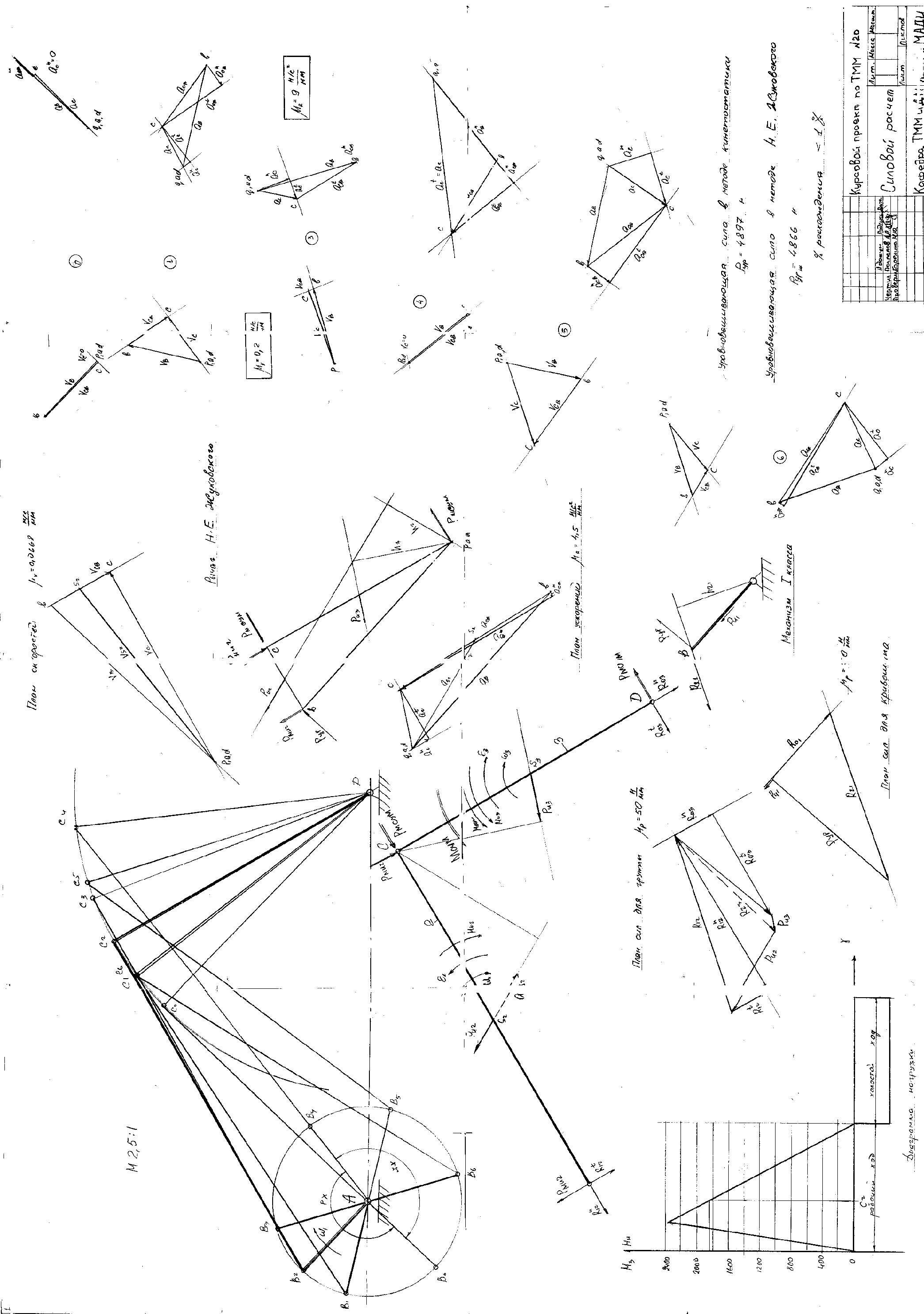
3.2 Кинематический анализ
Построить планы механизма (например шарнирного четырехзвенника) в шести, семи положениях. При этом начинать надо с вычерчивания методом засечек двух мертвых положений механизма. Они определят на повороте кривошипа рабочий ход и холостой ход. За нулевое положение принимаем начало рабочего хода. От нулевого положения построим через 600 ещё шесть положений механизма. Седьмым будет второе мертвое положение.
Выделим сплошной контурной линией одно из промежуточных положений на рабочем или холостом ходу. В этом положении будем в дальнейшем проводить силовой расчет механизма.
В расчетном положении проводим построение плана скоростей и ускорений, выписывая все векторные уравнения для скоростей и ускорений. Планы должны быть достаточно большими, чтобы обеспечить точность силового расчета
Построить план скоростей механизма в расчетном положении и подсчитать масштабный коэффициент v. Подсчитать скорости различных точек механизма и угловые скорости ведомых звеньев.
Построить план ускорений механизма. Записать векторные уравнения. Подсчитать масштабный коэффициент а.

Р ис.7
ис.7
Подсчитать величины линейных ускорений центров масс и других точек. При этом необходимо определить модули всех линейных и угловых скоростей и ускорений.
Для остальных шести положений на листе строим планы скоростей и ускорений и приводим результаты расчетов в табличной форме
Таблицы для кривошипно-ползунного и шарнирного четырехзвенника приведены ниже.
ШАРНИРНЫЙ ЧЕТЫРЕХЗВННИК
|
VB |
VCB |
VC |
1 |
2 |
3 |
aB |
anCB |
atCB |
aCB |
anC |
atC |
aC |
2 |
3 |
aS2 |
aS3 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ
|
VB |
VCB |
VC |
1 |
2 |
|
aB |
anCB |
atCB |
aCB |
|
|
aC |
2 |
|
aS2 |
aS3 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|