

1.2 Синтез кулачкового механизма с плоским тарельчатым толкателем
Целью синтеза кулачкового механизма с плоским тарельчатым толкателем является определение минимального радиуса основной шайбы кулачка r0 , а также определение радиуса тарелки Rтар.
Лимитирующими в кулачковом механизме с плоским тарельчатым толкателем являются кинематические условия, то есть при неправильном выборе размеров кулачка, радиуса r0 , невозможно будет реализовать выбранный закон движения толкателя.
Другими словами кинематическое условие проектирование можно сформулировать, как условие выпуклости действительного профиля кулачка.
Определим минимальный радиус кулачка r0 для механизма с плоским тарельчатым толкателем из условия обеспечения выпуклого профиля кулачка. Для этого можно воспользоваться методом Я.Л. Геронимуса, позволяющим графически решить неравенство

Для решения неравенства необходимо воспользоваться диаграммой S=Ф5(d2s/dφ2), которую необходимо построить с одинаковыми масштабными коэффициентами по обеим осям диаграммы. Эта диаграмма строится совмещением двух диаграмм S=Ф1(φ) и d2s/dφ2= Ф3(φ)
На правой или левой свободных частях листа построим совмещенную диаграмму s=Ф4(ds/dφ) с одинаковыми масштабными коэффициентами по обеим осям. Для этого совместим диаграммы S=Ф1(φ) и ds/dφ= Ф2(φ), полученные ранее при интегрировании ( Рис 1), исключив параметр φ. При этом необходимо подсчитать либо коэффициент преобразования одной из координат Кv, либо угол наклона отображающей прямой v
Kа=tg а=s /d2s/dφ2=Hа; а=arctg Kа
Проведем к отрицательной части диаграммы прямую под углом 45 град. Она отсечет на оси ординат минимальный радиус r0min
Подсчитать радиус основной шайбы кулачка, приняв минимальный радиус кривизны профиля кулачка
Rкрив.min.=(10…20) 10-3 м
![]()
Если минимальный радиус r0min получается меньше, чем ход толкателя hmax, то следует принять
r 0 =(3…5) hmax .
Построить в масштабе теоретический профиль кулачка, применив метод обращенного движения. Для этого от произвольного положения против вращения отложим фазовые углы φп, φвв, φоп. Разбиваем фазовые углы на интервалы, соответствующие интервалам закона движения и проводим оси толкателя как
центральные, проходящие через центр ращения кулачка. По соответствующим направлениям откладываем перемещения толкателя si при этом рекомендуется заполнить таблицу. Выделить кружочками центры тарелки во всех промежуточных положениях толкателя.
Положения |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
S диаграммы |
|
|
|
|
|
|
|
|
|
|
|
|
|
Перемещение на плане |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Положения |
13 |
14 |
15 |
16 |
17 |
18 |
19 |
20 |
21 |
22 |
23 |
24 |
|
S диаграммы |
|
|
|
|
|
|
|
|
|
|
|
|
|
Перемещение на плане |
|
|
|
|
|
|
|
|
|
|
|
|
|
Построить практический профиль кулачка, проводя перпендикуляры к радиусам (тарелки) через соответствующие точки теоретического профиля. Действительный профиль будет являться огибающей параметрического семейства тарелок.
Выбрать радиус тарелки толкателя, учитывая, что величина радиуса тарелки должна быть Rтарелки›│ds/dφ│max.
Радиус тарелки Rтар толкателя может быть определен и приближенно после построения практического профиля кулачка по расстоянию от центра тарелки до наиболее удаленной точки касания тарелки с практическим профилем. Радиус тарелки следует принять на (5..8)х10-3м большим, чем найденное расстояние с учетом масштаба построения.
Rтарелки=│ds/dφ│max +5…8 мм.
Закончить построение плана кулачкового механизма с тарельчатым толкателем. показав контурной линией практический профиль кулачка, пунктирной линией теоретический профиль. В одном из положений изобразить тарельчатый толкатель с учетом определенного радиуса тарелки Rтар, показать опоры кулачка и толкателя. Проставить на плане механизма r0, hmax, ωкул, углы φп, φвв, φоп, φнв, а также обозначить номера всех взаимных положений кулачка и толкателя.
ЛИСТ 2. ПРОЕКТИРОВАНИЕ ЗУБЧАТОЙ ПЕРЕДАЧИ
Цель листа . Для заданных параметров цилиндрической зубчатой
передачи провести геометрический расчет и выполнить чертеж эвольвентной цилиндрической зубчатой передачи внешнего зацепления. Определить также качественные показатели этой передачи.
Пример выполнения листа показан на Рис. 4
2.1. Исходные данные:
Исходные данные для выполнения второго листа содержатся на странице задания.
Z1, Z2, - числа зубьев колес
m – модуль зубчатой передачи
x1, x2 – коэффициенты смещения инструмента при нарезании
зубчатых колес
Параметры исходного контура (ГОСТ 13755-84)
ha*- коэффициент высоты головки зуба
hl*- коэффициент граничной высоты
с* - коэффициент радиального зазора
α- угол профиля исходного контура
Р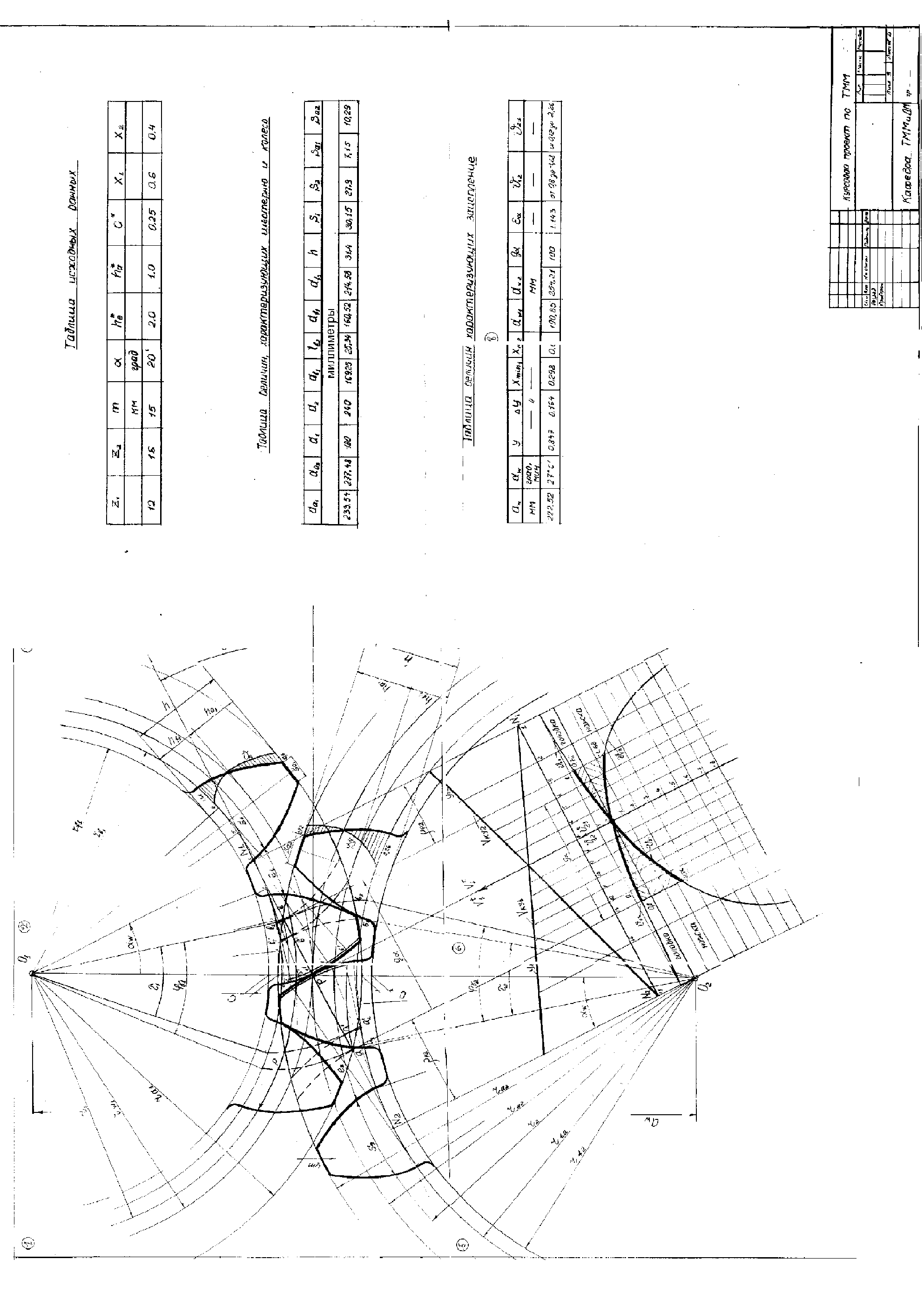 ис.4
ис.4
Выберем диапазон α, внутри которого наверняка лежит угол зацепления αw. Например: 200 и 300. Подсчитаем на калькуляторе, по приведенной формуле, инволюты этих углов.