

1.3 Синтез кулачкового механизма с роликовым толкателем.
Целью синтеза кулачкового механизма с роликовым толкателем является определение минимального радиуса основной шайбы кулачка r0 и эксцентриситета е. Необходимо также правильно выбрать радиус ролика Rрол.
Лимитирующими в кулачковом механизме с роликовым толкателем являются динамические условия , то есть при неправильном выборе размеров возможен низкий мгновенный КПД и даже заклинивание механизма. Необходимо выбрать такие радиус основной шайбы кулачка r0 и эксцентриситет е, при которых во всех положениях на фазах подъема и опускания углы передачи движения будут больше допустимых. Делается это с помощью диаграммы s=Ф4(ds/dφ) , так называемой совмещенной диаграммы перемещения и аналога скорости. На этой диаграмме ищется зона работоспособности, определяемая неравенством
В этой зоне выбирается центр вращения
кулачка и определяется r0
и
эксцентриситет е. Поэтому рекомендуется
следующая последовательность.
этой зоне выбирается центр вращения
кулачка и определяется r0
и
эксцентриситет е. Поэтому рекомендуется
следующая последовательность.
На правой или левой частях листа построим совмещенную диаграмму s=Ф4(ds/dφ) в одинаковых масштабных коэффициентах по обеим осям. Для этого совместим диаграммы S=Ф1(φ) и ds/dφ= Ф2(φ), полученные ранее при интегрировании , исключив параметр φ. При этом необходимо подсчитать либо коэффициент преобразования одной из координат Кv, либо угол наклона отображающей прямой v
Kv=tg v=s /ds/dφ=Hv; v=arctg Kv .
К совмещенной диаграмме под углами допп и допоп проведем касательные, две прямые, пересечение которых и определяет зону работоспособности кулачкового механизма. Наименьшие габариты кулачкового механизма будут получаться, если центр вращения кулачка относительно этой диаграммы выбрать в вершине зоны работоспособности. Однако, если мы не стеснены габаритами, центр вращения кулачка можно выбрать внутри этой зоны, при этом будут выполняться условия проектирования.
Выберем центр вращения кулачка, а, следовательно, и радиус основной шайбы кулачка r0 и эксцентриситета е с учетом реальных размеров ролика Рис. 3.
Для наших кулачковых механизмов размеры ролика, с учетом возможных габаритов шариковых подшипников качения, лежат в пределах 6….15 мм. Диаметр ролика Rрол необходимо выбирать меньше 0,4r0min.
Из этих соображений выбираем Rрол.
С целью гарантированного выполнения условия построения действительного профиля кулачка без самопересечения, выберем минимальный радиус теоретического профиля кулачка как показано на рис 3. Центр вращения кулачка А выбирается в зоне работоспособности на пересечении вертикали из вершины зоны и радиуса ролика.
Замеряем r0
Эксцентриситет сохраняется таким же, как в вершине зоны
е=е0min
Построить в масштабе теоретический профиль кулачка, применив метод обращения движения (рис 2). Для этого проводим окружности радиусами r0 и e и от произвольного направления откладываем фазовые углы. Разбиваем фазовые углы на интервалы, соответствующие интервалам закона движения и проводим оси толкателя как касательные к эксцентриситету . По соответствующим направлениям откладываем перемещения толкателя при этом рекомендуется заполнить таблицу.
Положения |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
S диаграммы |
|
|
|
|
|
|
|
|
|
|
|
|
|
Перемещение на плане |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Положения |
13 |
14 |
15 |
16 |
17 |
18 |
19 |
20 |
21 |
22 |
23 |
24 |
|
S диаграммы |
|
|
|
|
|
|
|
|
|
|
|
|
|
Перемещение на плане |
|
|
|
|
|
|
|
|
|
|
|
|
|
Получаем теоретический профиль кулачка, траекторию центров ролика в обращенном движения. Центры ролика рекомендуется выделить кружочками.
Найдем наименьший радиус кривизны ρmin выпуклой части теоретического профиля кулачка приближенным геометрическим построением.
ρmin=
Проверим, что радиус ролика удовлетворяет условию отсутствия самопересечения действительного профиля кулачка.
Rрол0,7 ρmin
Далее необходимо закончить построение плана кулачкового механизма c роликовым толкателем. Вычертить контурной линией практический профиль кулачка, как огибающую параметрического семейства роликов.
В одном из положений изобразить роликовый толкатель, показать опоры кулачка механизма r0, hmax, ωкул, углы φп, φвв, φоп, φнв, а также обозначить номера всех взаимных и толкателя, кинематическую пару толкателя и ролика. Проставить на плане номера взаимных положений кулачка и толкателя.
Для выбранного на совмещенной диаграмме центра вращения кулачка, построить график изменения угла давления или график изменения угла передачи движения во всем диапазоне рабочего угла поворота кулачка. Для этого на диаграмме s=Ф4(ds/dφ) соединим
все
точки с центром вращения кулачка А , с
помощью транспортира замерим углы
давления или передачи движения в каждом
положении и отложим эти значения на
соответствующей диаграмме.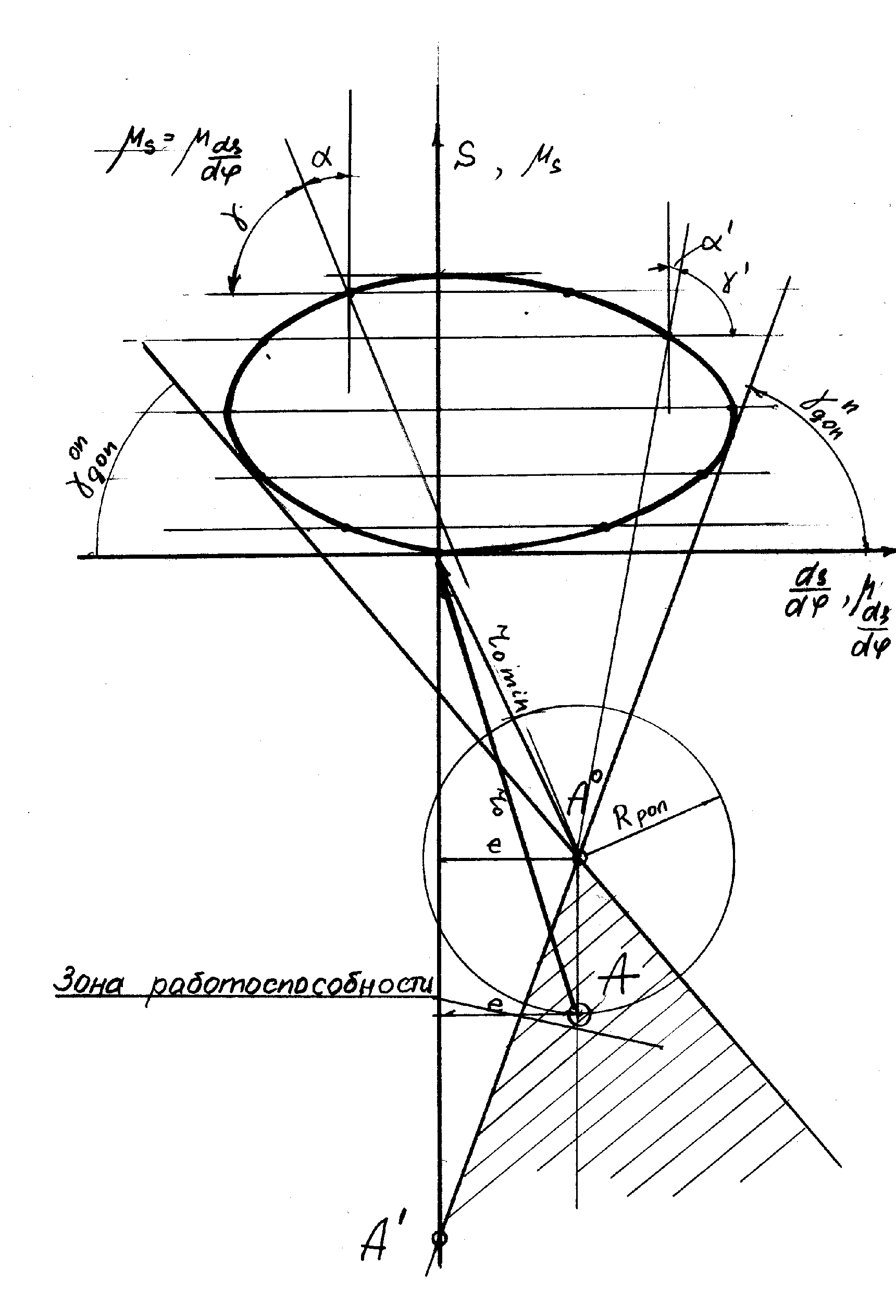
Рис.
3