

Модуль подъема
В качестве аппаратно-измерительной части выбрана цифровая плата расширения PCI-1730 фирмы Advantech. Плата устанавливается в разъем PCI последовательной шины компьютера.
Каналы разбиваются следующим образом (табл. 1):
Таблица 1
Распределение каналов управления РФ-202М
|
Каналы Порт |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
Подача |
0 |
Подъем - опускание |
Поворот влево-вправо |
Рука 1 вперед-назад |
Разворот схвата1 |
Схват1 |
Рука 2 вперед-назад |
Разворот схвата2 |
Схват2 |
Прием |
0 |
Д1 подьема |
Д2 подьема |
Д1 поворота |
Д2 поворота |
Д1 1 руки |
Д2 1 руки |
Д1 2 руки |
Д2 2 руки |
Примечание. Условные обозначения:
Д1, Д2 - прием сигнала от герконов конечного и начального положения.
Для начала перемещения нужно подать сигнал на необходимый канал. При этом срабатывает нужная пара клапанов: один закрывается, а другой открывается. Для обратного движения, нужно сигнал снять.
Таблица 1 - Формулы строения манипуляторов промышленных роботов
№ |
Модель робота |
Формула строения |
№ |
Модель робота |
Формула строения |
1 |
Unimate |
W= +x+ + + + |
9 |
Fanuc M-1 |
W= +z+y+ + + |
2 |
Универсал |
W= +x+ + + + |
10 |
Fanuc M-2 |
W=z+ +x+ + + |
3 |
Auto-Mate |
W= +x+ + + + |
11 |
Toyoda |
W=x+z+y+ + |
4 |
Prab |
W= +x+ + + + |
12 |
Autohand |
W=z+y+x+ + |
5 |
РС-40 |
W=x+ + + +z+y |
13 |
Kaufeldt |
W=z+ +x+ + |
6 |
РВ- 231 |
W=x+ +z+y+ +x |
14 |
IR-60 |
W= + + + + + |
7 |
Versatran |
W=y+ +z+x+ + |
15 |
Контур |
W= + + + + + |
8 |
Matbac |
W= +z+y+ + + |
16 |
Asea |
W= + + + + |
__________________________________________________________
(ФИО)
Лабораторная работа №4
Структурный анализ манипуляторов
1. Структурный анализ пневматического манипулятора рф-202 м Структурная схема манипулятора
Основные параметры структурной схемы манипулятора
1 |
Формула строения |
|
|
||||
2 |
Звенья, образующие в манипуляторе |
"руку" |
|
|
|
|
|
"кисть" |
|
|
|
|
|||
3 |
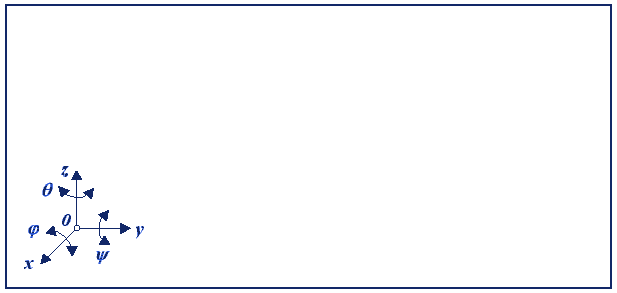
Система координат "руки" манипулятора |
|
|||||
4 |
Число звеньев |
общее |
k |
|
|
||
подвижных |
n |
|
|
||||
5 |
Число одноподвижных кинематических пар |
вращательных |
p1в |
|
|
||
поступательных |
p1п |
|
|
||||
6 |
Число подвижностей в пространстве |
Wпр |
|
|
|||
7 |
Маневренность в пространстве |
Mпр |
|
|
|||
8 |
Число избыточных связей в механизме |
qпр |
|
|
|||
Кинематические пары манипулятора
Обозначение КП |
|
|
|
|
|
|
Звенья, образующие КП |
|
|
|
|
|
|
Относит. движение |
|
|
|
|
|
|
Подвижность в КП |
|
|
|
|
|
|
Ось ориентации КП |
|
|
|
|
|
|