

7. Моделювання перехідних процесів за допомогою комп’ютерних програм
Для моделювання перехідного процесу по каналу регулювання завантажте комп’ютерну програму SIAM. Стартовий файл програми – siam.bat.
В режимі вводу моделі складіть блок-схему моделювання, що відповідає структурній схемі досліджуваної системи та задайте параметри ланок. Приклад схеми моделювання перехідних процесів для системи регулювання температури в печі показано рис. 8.
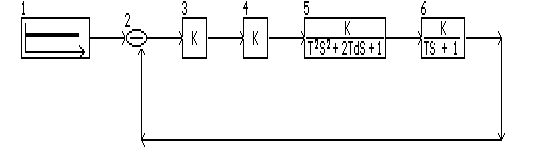
Рис. 8. Схема моделювання перехідних процесів системи автоматичного регулювання температури в печі
Далі в режимі моделювання виберіть метод чисельного інтегрування, наприклад метод Фельберга. Вкажіть точність розрахунку і часовий інтервал інтегрування (кінцеве значення часу інтегрування підбирається експериментально). Поспостерігайте за результатами моделювання перехідних процесів у вигляді графіка та випишіть дані із таблиці. Результати моделювання і розрахунку перехідних процесів повинні співпадати в противному разі слід знайти і усунути помилку.
Приклад. Для моделювання перехідних процесів у системі автоматичного регулювання була побудована схема (рис. 9), у якій задані наступні параметри:
K(3)=1,75, K(4)=18, К(5)=0,35, K(6)=3,38, Т(6)=2,88.
Перехід від форми запису передаточної функції коливної ланки у виді
![]() до
до
![]()
здійснюють за формулами:
![]()
![]() .
.
Для проведення моделювання виберемо метод моделювання та встановимо наступні параметри :
Метод моделювання: Фельберга.
Похибка: 0,01.
Початкове значення часу: 0.
Кінцеве значення часу: 10.
Результати моделювання в СИАМ показані на рис. 9.
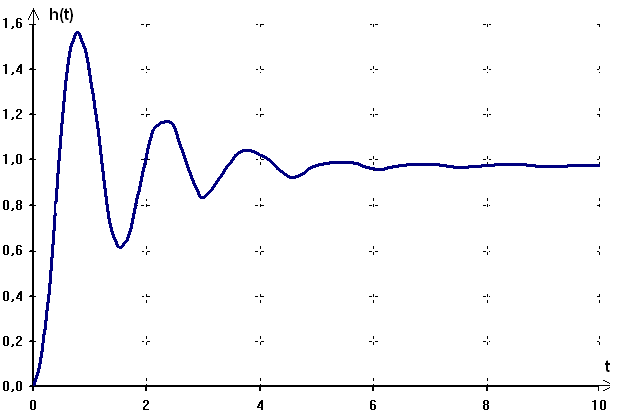
Рис. 9. Перехідна характеристика, отримана в результаті моделювання в програмі SIAM
Іншою комп’ютерною програмою, що дозволяє змоделювати перехідний процес в системі автоматичного регулювання, є система MATLAB, а саме пакет розширення Simulink.
Складена в Simulink модель показана на рис. 10.
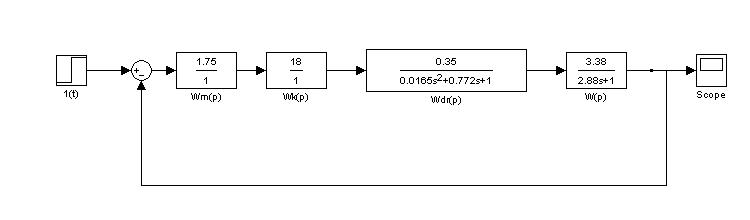
Рис. 10. Схема моделі системи за каналом завдання у програмі Simulink.
В результаті моделювання отримали перехідну характеристику, зображену на рис. 11.
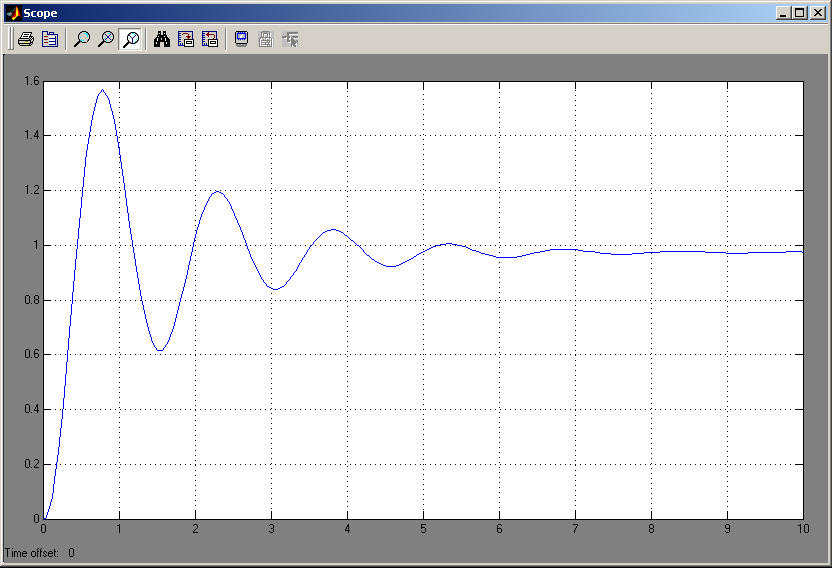
Рис. 11. Перехідна характеристика за каналом завдання-вихід, побудована в Simulink.
Аналізуючи перехідні характеристику системи за каналом задаючої дії побудовані шляхом моделювання у комп’ютерних програмах SIAM та SIMULINK, можна зробити висновок про правильність аналітичного розрахунку перехідної характеристики за теоремою розкладу.
8. Оцінка якості регулювання
Якість регулювання оцінюють за допомогою прямих показників якості, котрі визначаються за побудованою перехідною характеристикою досліджуваної системи. На основі показників якості роблять висновок про динамічні та статичні властивості системи. Зауважимо, що перерегулювання в системі не повинно перевищувати 30%, а коливальність відповідати одному, або двом повним коливанням. У випадку невідповідності вказаним вимогам слід провести коригування системи.
Приклад.
Рис. 12. Оцінка якості регулювання на основі перехідної характеристики
tр
=
4,7
с - час
регулювання
– це час після якого регульована величина
не буде превищувати деякого наперед
заданого значення
![]() ,
яке задається у відсотках від усталеного
значення і рівне 5%.
,
яке задається у відсотках від усталеного
значення і рівне 5%.
![]()
tпу = 0,4 с - час першого узгодження – час за який регульована величина вперше перетинає рівень усталеного значення.
tм = 0,76 с - час першого максимуму – час за який регульована величина вперше досягає максимального значення.
δуст = 1-0,97 = 0,03 - усталена похибка – це різниця між дійсним иа заданим значення регульованої величини, що залишилась після закінчення перехідного процесу.
hmax= 1,56 - максимальне значення регульованої величини.
![]() =
0,97
- усталене значення вихідної регульованої
величини.
=
0,97
- усталене значення вихідної регульованої
величини.
![]() -
перерегулювання
– характеризує максимальне відхилення
регульованої величини від усталеного
значення виражене у відсотках.
-
перерегулювання
– характеризує максимальне відхилення
регульованої величини від усталеного
значення виражене у відсотках.
T0 = 1,67 c - період коливань.
A1 = 0,57, A2 = 0,19.
![]() -
коливальність.
-
коливальність.
Кількість коливань на протязі часу регулювання: N=3.