

6. Розрахунок і побудова перехідної характеристики системи автоматичного керування
Аналітичні методи побудови перехідних характеристик ґрунтуються на розв’язку диференціального рівняння системи. Для цього може бути використаний як класичний метод розв’язку диференціальних рівнянь так і операторний, на основі зображень Лапласа. Основна складність класичного методу розв’язку диференціальних рівнянь полягає у визначенні сталих інтегрування і знаходження коренів характеристичного рівняння.
Найбільш поширеним методом розв’язку диференціальних рівнянь є операторний метод з використанням теореми розкладання. Операторний метод дає змогу уникнути трудомісткої процедури визначення сталих інтегрування і урахування початкових умов, але не звільняє від знаходження коренів характеристичного рівняння.
З численних способів визначення наближених значень коренів характеристичного рівняння ефективними є метод ділення многочленів та ітераційний метод. При виконанні роботи корені характеристичного рівняння рекомендується знаходити з допомогою комп’ютерної програми MatLab.
При операторному методі розв’язку диференціальних рівнянь спочатку знаходять зображення перехідної характеристики за формулою
![]() ,
/12/
,
/12/
де
![]() -
зображення Лапласа одиничної ступінчастої
функції 1(t).
-
зображення Лапласа одиничної ступінчастої
функції 1(t).
Операторний метод накладає обмеження на передаточну функцію замкнутої системи. Вона повинна бути дробово-раціональною, тобто представленою у вигляді відношення двох поліномів
![]() .
/13/
.
/13/
З урахуванням цього вираз для зображення перехідної характеристики можна привести до вигляду
![]() .
/14/
.
/14/
Згідно з теоремою розкладання для випадку одного нульового і некратних дійсних коренів характеристичного рівняння вираз для перехідної характеристики має вигляд
![]() ,
/15/
,
/15/
де
![]() -
корені характеристичного рівняння D(p)
= 0;
-
корені характеристичного рівняння D(p)
= 0;
![]() -
похідна від полінома-знаменника
передаточної функції.
-
похідна від полінома-знаменника
передаточної функції.
У випадку комплексних коренів кожній парі комплексно-спряжених коренів
![]() ,
,
![]() /16/
/16/
відповідають комплексні вирази
![]() ,
,
![]() ,
/17/
,
/17/
які мають однакові модулі, але різні знаки аргументів.
В результаті сума доданків, що відповідають парі комплексно-спряжених коренів, може бути зведена до одного виразу
 .
/18/
.
/18/
Таким чином у випадку k- дійсних і е - пар комплексних коренів теорему розкладання використовують у вигляді
![]() .
/19/
.
/19/
Приклад. Визначимо перехідну характеристику для системи автоматичного керування з передаточною функцією
![]() . /20/
. /20/
Згідно (12) для зображення перехідної характеристики отримаємо
![]() /21/
/21/
Отже, у цьому випадку
![]() ,
,
![]() ,
,
![]() .
.
Прирівнявши знаменник зображення передаточної функції до нуля отримуємо характеристичне рівняння замкнутої системи
![]() .
/22/
.
/22/
Скориставшись Matlab знайдемо корені характеристичного рівняння :
p0= 0 с-1,
p1= -45,865 с-1,
p2= -0,64 + 4,142j с-1,
p3= -0,64 - 4,142j с-1.
Підрахуємо:
![]() ,
,
Відповідно
![]()
![]()
![]()
Аналогічно
знаходимо
![]()
![]() ,
,
![]()
![]()
Скориставшись формулою Ейлера в результаті отримаємо
![]()
Запишемо рівняння перехідної характеристики:
![]() .
.
За отриманою формулою розраховуємо перехідну характеристику замкнутої системи. Дані занесені у табл. 2.
Таблиця 2
t,c |
0,00 |
0,30 |
0,45 |
0,76 |
1,06 |
1,52 |
1,67 |
1,97 |
2,58 |
3,03 |
3,64 |
4,09 |
4,55 |
5,00 |
h(t) |
-0,03 |
0,67 |
1,16 |
1,59 |
1,16 |
0,60 |
0,68 |
1,04 |
1,05 |
0,83 |
1,05 |
1,00 |
0,92 |
0,98 |
t,c |
5,61 |
6,06 |
6,52 |
7,12 |
7,58 |
8,03 |
8,48 |
9,09 |
9,55 |
10,00 |
10,61 |
11,06 |
11,52 |
12,12 |
h(t) |
0,99 |
0,95 |
0,98 |
0,98 |
0,97 |
0,98 |
0,98 |
0,97 |
0,97 |
0,98 |
0,97 |
0,97 |
0,98 |
0,97 |
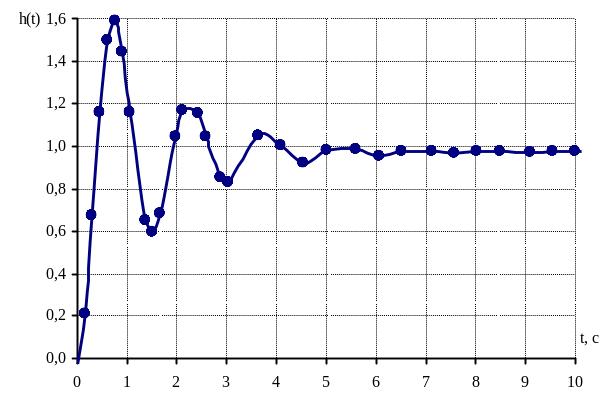
Рис.7. Перехідна характеристика САР за каналом задаючої дії
Аналогічним способом знаходять вираз для перехідної характеристики за каналом збурення. При цьому використовують передаточну функцію замкнутої системи за каналом збурення.