

2. Векторна величина , яка дорівнює добутку моменту інерції на кутову швидкість, називається моментом імпульсу:
-

(21.90)
Напрям
і
 співпадають. Модуль моменту імпульсу
матеріальної точки масою m,
яка рухається по колу радіуса r,
виражається формулою:
співпадають. Модуль моменту імпульсу
матеріальної точки масою m,
яка рухається по колу радіуса r,
виражається формулою:
 ,
,
де w
- кутова швидкість точки,
w
- кутова швидкість точки,
 –
лінійна швидкість точки (Error: Reference source not found)П
–
лінійна швидкість точки (Error: Reference source not found)П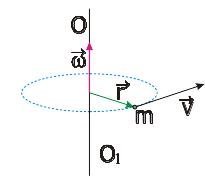 ідставивши
в Error: Reference source not found
замість
його
значення
ідставивши
в Error: Reference source not found
замість
його
значення
 і вважаючи, що момент інерції твердого
тіла є величина стала ( I=const
), одержимо:
і вважаючи, що момент інерції твердого
тіла є величина стала ( I=const
), одержимо:

Рівняння Error: Reference source not found називають основним рівнянням динаміки обертального руху. Із рівняння Error: Reference source not found видно, що швидкість зміни моменту імпульсу тіла, яке обертається, дорівнює сумі моментів сил, які діють на це тіло.
Рис. 21.3
Із формули Error: Reference source not found видно, що момент інерції І характеризує інертні властивості тіл під час обертального руху, тобто момент інерції відіграє таку ж роль, що й маса під час поступального руху. Момент інерції – скалярна величина, яка залежить від маси тіла та її розподілу в тілі відносно осі обертання. Одиницею вимірювання моменту інерції в системі СІ є 1кГм2. Обчислюють момент інерції за формулою:
-

(21.91)
де r – густина речовини, V – об’єм тіла.
Обчислення моменту інерції тіл – задача дуже складна. Вона легко розв’язується, якщо тіло однорідне і має просту геометричну форму. Момент інерції тіл складної форми з нерівномірним розподілом мас момент інерції визначають експериментальним шляхом. Формули, за якими можна обчислити момент інерції деяких простих тіл, подано в таблиці 1.
Гюйгенса-Штейнера
можна знайти момент інерції цього ж
тіла відносно осі О1О1,
паралельної даній Якщо відомо момент
інерції відносно осі ОО, яка проходить
через центр мас, то за теоремою осі ОО:
 ,
де d – віддаль між осями,
m – маса тіла (Error: Reference source not found.4).
,
де d – віддаль між осями,
m – маса тіла (Error: Reference source not found.4).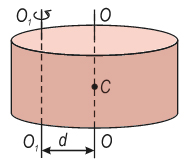
Теорема Гюгенца-Штейнера.
Момент інерції твердого тіла відносно довільної осі О1О1 дорівнює сумі моментів інерції відносно осі ОО, що проходить через центр мас паралельно даній осі та добутку маси тіла на квадрат відстані між осями (Error: Reference source not found)
I
=
 + md
+ md
Рис. 214
3. Вільні осі обертання
В ісь
обертання, яка зберігає своє положення
в просторі за відсутності зовнішніх
дій, називається вільною віссю. Розрахунки
та експерименти показують, що вільні
осі завжди проходять через центр мас
тіла, а обертання буде стійким лише
відносно тих осей, момент інерції тіла
відносно яких або максимальний, або
мінімальний.
ісь
обертання, яка зберігає своє положення
в просторі за відсутності зовнішніх
дій, називається вільною віссю. Розрахунки
та експерименти показують, що вільні
осі завжди проходять через центр мас
тіла, а обертання буде стійким лише
відносно тих осей, момент інерції тіла
відносно яких або максимальний, або
мінімальний.
Рис.22.17
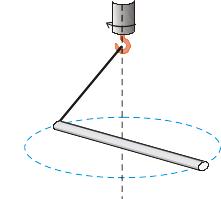
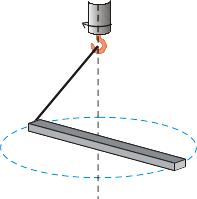
Рис.21.5 Рис . 21.6
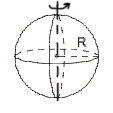
Н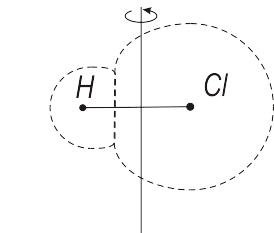 априклад,
у паралелепіпеда (Рис.22.17) стійкими
будуть осі ХХ та ZZ. Вільне
(стійке) обертання може відбуватися
тільки відносно однієї із цих осей.
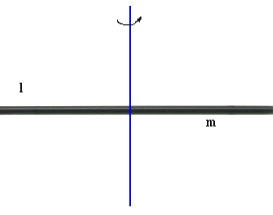
Наприклад, стержень чи брусок підвішений
на нитці, яку приводять в обертальний
рух, також починають обертатись відносно
стійкої вільної осі (Рис.21.).
априклад,
у паралелепіпеда (Рис.22.17) стійкими
будуть осі ХХ та ZZ. Вільне
(стійке) обертання може відбуватися
тільки відносно однієї із цих осей.
Наприклад, стержень чи брусок підвішений
на нитці, яку приводять в обертальний
рух, також починають обертатись відносно
стійкої вільної осі (Рис.21.).
Вільне обертання молекул також відбувається відносно стійких (вільних) осей. На Error: Reference source not foundтака вісь показана для хлористого водню (HCl).
Рис. 21.7
Таблиця 1
Тіло |
Положення осі |
Момент інерції І |
Порожнистий циліндр (обруч) радіуса R і масою m |
В
|
|
Суцільний циліндр (диск) масою m і радіуса R |
В |
|
Суцільний диск масою m і радіуса R |
В
|
|
Куля радіуса R і масою m |
В
|
|
Тонкостінна сфера радіуса R і масою m |
Вісь проходить через центр сфери
|
|
Прямий тонкий стержень довжиною l і масою m |
В
|
|
Той же стержень |
В
|
|
 ісь
циліндра (обруча) проходить через
центр мас перпендикулярно до площини,
у якій лежить обруч.
ісь
циліндра (обруча) проходить через
центр мас перпендикулярно до площини,
у якій лежить обруч.
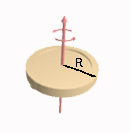 ісь
циліндра (диска) проходить через його
центр перпендикулярно до площини
диска.
ісь
циліндра (диска) проходить через його
центр перпендикулярно до площини
диска.
 ісь
лежить в площині диска і проходить
через його центр.
ісь
лежить в площині диска і проходить
через його центр.
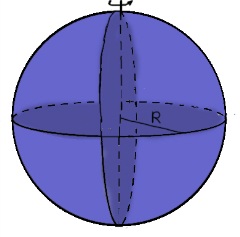 ісь
проходить через центр кулі
ісь
проходить через центр кулі

 ісь
перпендикулярна до стержня і проходить
через його середину
ісь
перпендикулярна до стержня і проходить
через його середину
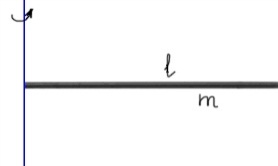 ісь
перпендикулярна до стержня і проходить
через його край
ісь
перпендикулярна до стержня і проходить
через його край