

11.Провести коригування отриманої системи, використовуючи логарифмічні частотні характеристики за одним з обраних параметрів та зменшити час регулювання. Зробити висновок по роботі.
Для виконання синтезу коректуючого пристрою, що забезпечує задані показники якості запишемо передаточну функцію у вигляді:

Початкові умови :
K=9.75 T0=3 Tрд=0.52 Тдв=0.024
tр=2 d=19%
Для підвищення точності роботи системи побудуємо бажану і реальну ЛАЧХ. Бажана ЛАЧХ реалізує ідеальну модель роботи системи,виходячи із відомих постійних часу і частоти зрізу. Реальна ЛАЧХ реалізує реальну роботу системи.
Для побудови точної ЛАЧХ реальної системи запишемо вираз для комплексної передаточної функції:



 /1/
/1/
Побудова бажаної ЛАЧХ поділяється на дві частини: низькочастотної і середньо частотної зони. При побудові ЛАЧХ низькочастотної зони в точці w=1 проводимо перпендикуляр на якому відкладаємо 20lgk. Через отриману точку проводимо пряму з нахилом (-20дБ/дек). При побудові середньочастотної зони на основі заданих величин перерегулювання та часу регулювання визначаємо частоту зрізу:
Для цього з номограми рис. 11.1. визначаємо m, яке беремо при мінімально-можливому значенні перерегулювання 19.
 Гц.
Гц.
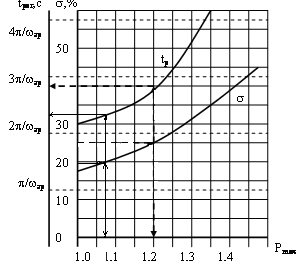
Рис.11.1. Номограма для визначення частоти зрізу
Приймаємо частоту
зрізу
 Гц.
Гц.
Визначимо
частоти спряження



 Підставивши
значення ω у формулу (1) і побудуємо
реальну ЛАЧХ. Нанесемо на графік значення
ω1,
ω2,
ω3,
ωз.min.
Підставивши
значення ω у формулу (1) і побудуємо
реальну ЛАЧХ. Нанесемо на графік значення
ω1,
ω2,
ω3,
ωз.min.
Знаходимо значення
амплітуди передаточної функції
 при
при
 =1,
тобто 20lg(k):
=1,
тобто 20lg(k):
20lgk=20*lg(9,75)=19,78.
.
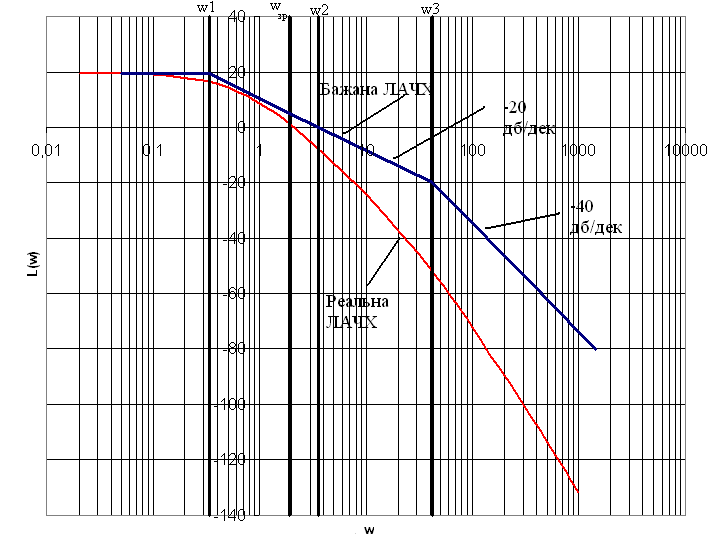
Рис.11.2 Сполучений графік бажаної і реальної ЛАЧХ.

Рис.11.3 Різниця між бажаною і реальною ЛАЧХ.
Апроксимуючи
отриману ЛАЧХ коректуючої ланки
відрізками прямих, знаходимо частоту
спряження
 ,
тоді стала часу:
,
тоді стала часу:

Нахил ЛАЧХ коректуючої ланки близький до 20 дБ/дек, тому показник степеня дорівнює n=1.
Отже, передаточна функція коректуючої ланки:
(k=1),

Передаточна функція розімкнутої системи із послідовною коректуючою ланкою:

Щоб усунути статичну помилку системи, потрібно у зворотній зв’язок підключити ланку з коефіцієнтом передачі:
k=1-1/k =1-1/9,75=1-0,1=0,9.
=1-1/9,75=1-0,1=0,9.
Побудуємо схему та знімемо перехідну характеристику скоректованої системи.
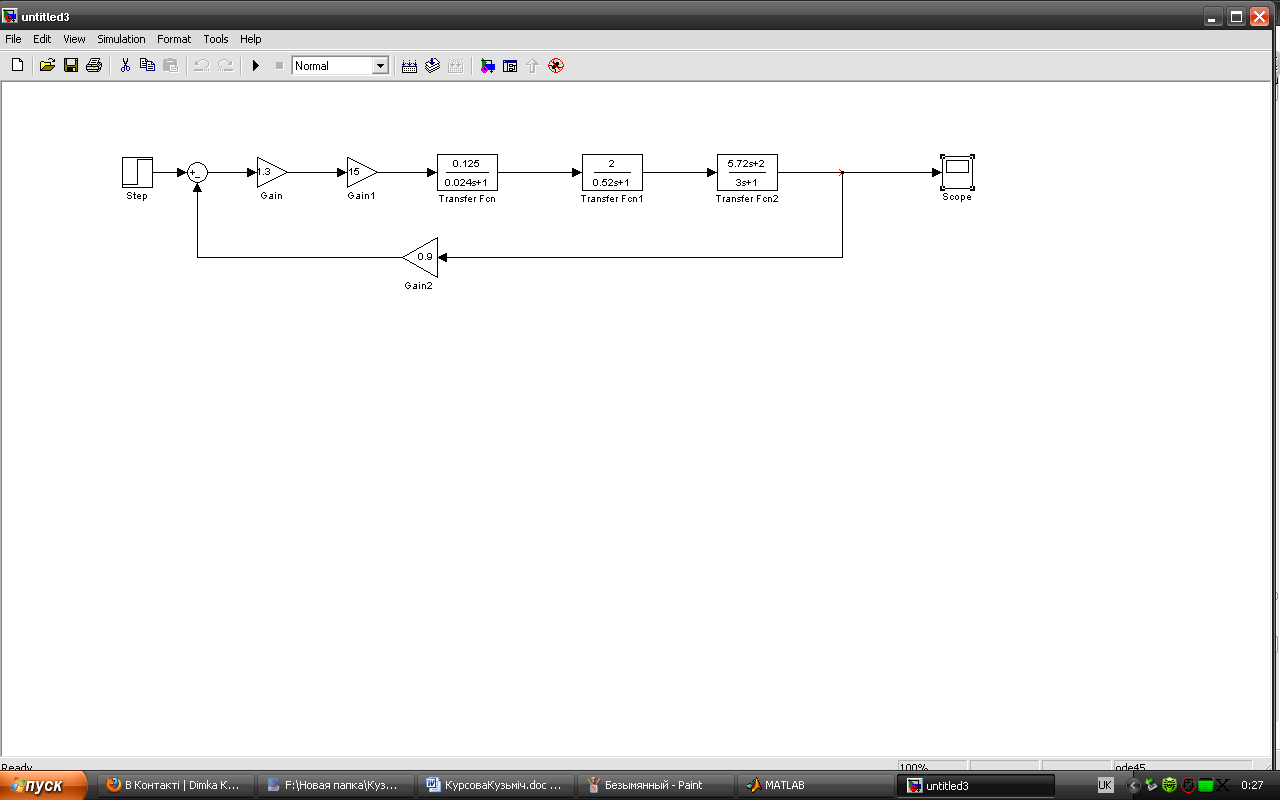
Рис.11.2 Структурна схема скоректованої САР.

Рис 11.3 Перехідна характеристика скоректованої САР

Рис 11.3 Показники якості скоректованої САР
Висновок: скоригувавши систему нам вдалося зменшити час регулювання з 3с. до 0,138с. , крім того вдалось усунути усталену похибку і перерегулювання.
Висновок
В ході виконання курсової роботи я провів аналіз системи автоматичного регулювання температури в печі:
1.)Виходячи з рівнянь, що описують динаміку системи та є аналітичними математичними моделями елементів системи, записав передаточні функції елементів системи, розімкнутої системи та замкнутої системи (за каналами задаючого впливу та збурення).
2.)На основі отриманої моделі системи автоматичного регулювання визначив стійкість системи, запаси стійкості, критичне значення коефіцієнта підсилення підсилювача, при якому система перебуватиме на межі стійкості.
3.) Дослідив реакцію системи на одиничну ступінчасту зміну завдання, аналітично за теоремою розкладу, а також шляхом комп’ютерного моделювання, що дозволило оцінити прямі показники якості роботи досліджуваної системи автоматичного регулювання.
4.) Розрахував інтегральну квадратичну оцінку системи, за допомогою оцінки знайшов оптимальний коефіцієнт підсилення регулятора яким виявився мій заданий за умовою коефіцієнт.
Так як показники якості системи автоматичного регулювання температури в печі не задовольняли вимогам, що ставляться до систем такого роду, провів корекцію системи шляхом введення послідовної коректуючої ланки та неодиничного зворотного зв’язку, це дозволило: зменшити час регулювання і усунути перерегулювання та усталену помилку. Скорегована система задовольняє нас за своїми якісними показниками та придатна до експлуатації.