

7. Результати перехідної характеристики за каналом задаючої дії перевірені шляхом моделювання процесів за допомогою комп’ютерної програми siam або sіmulink
Для моделювання перехідного процесу по каналу регулюваня завантажуємо комп’ютерну програму Matlab, пакет Simulink. Будуємо блок-схему моделювання перехідних процесів для системи регулювання температури в печі.
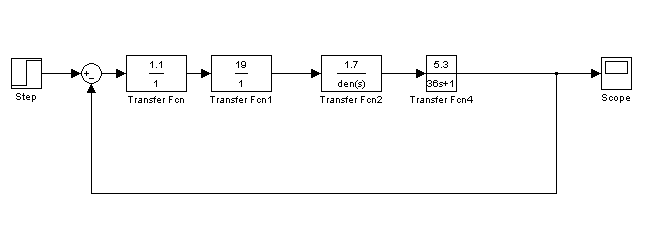
Рис.7.1. Структурна схема по каналу регулювання
В результаті моделювання перехідних процесів отримаємо таблицю:
t |
h1(t) |
0 |
0,004282 |
0,2 |
1,105301 |
0,4 |
1,816187 |
0,6 |
1,387805 |
0,8 |
0,492262 |
1 |
0,338218 |
1,2 |
1,056444 |
1,4 |
1,631323 |
1,6 |
1,328863 |
3 |
0,579588 |
3,4 |
1,374 |
4 |
0,666136 |
4,4 |
1,286557 |
4,8 |
0,853532 |
5 |
0,735458 |
6 |
0,790821 |
7 |
0,834912 |
8 |
0,869932 |
9 |
0,897675 |
10 |
0,919596 |
0 |
0,004282 |
0,2 |
1,105301 |
0,4 |
1,816187 |
0,6 |
1,387805 |
0,8 |
0,492262 |
Табл.7.1
і графік перехідного процесу системи.
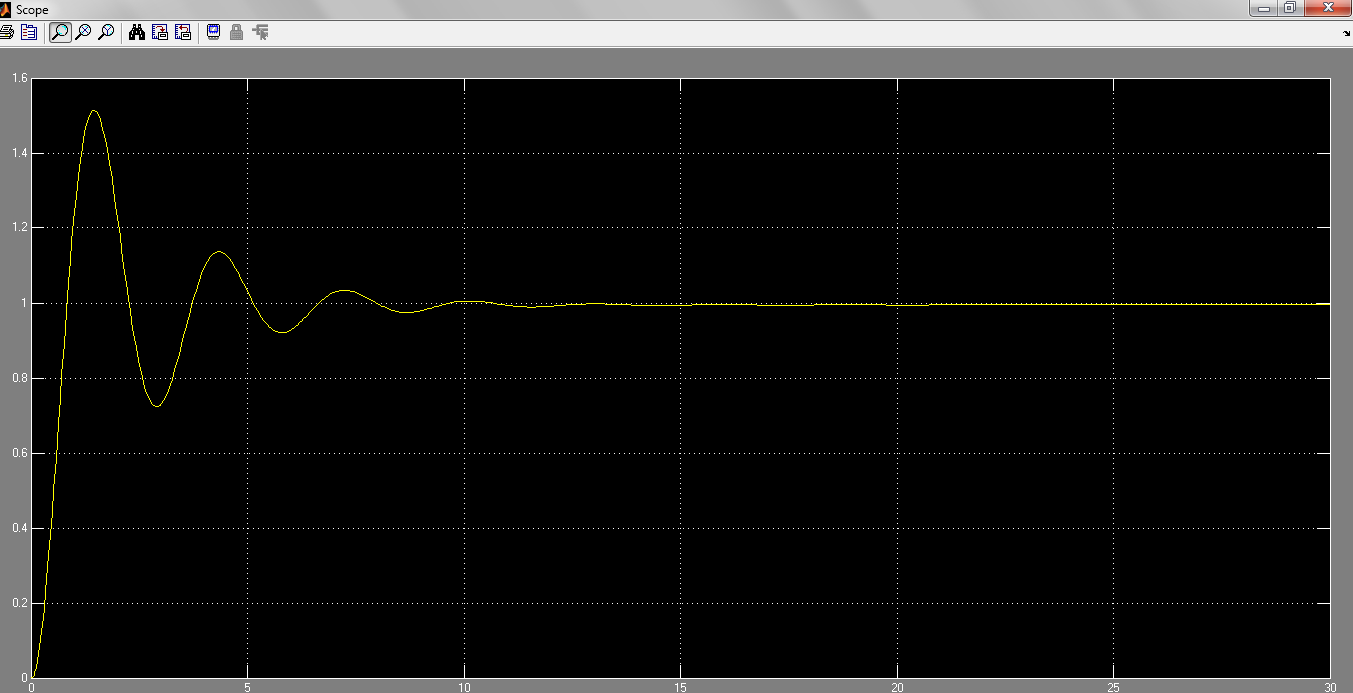
Рис 7.2.Перехідна характеристика за каналом регулювання
Висновок: графік перехідної характеристики, отриманий за допомогою програми MatLAB та графік перехідної характеристики, отриманий за даними розрахунків з допомогою системи Microsoft Excel співпадають,отже розрахунки проведено вірно.
8. Оцінка якості регулювання
Якість регулювання оцінюють за допомогою прямих показників якості, котрі визначаються за побудованою перехідною характеристикою досліджуваної системи.

Рис. 8.1 перехідна характеристика побудована за допомогою Exel.
tр =12,21 с - час регулювання;
tпу=1,2 с - час першого досягнення рівня усталеного режиму;
tм=2,21 с - час першого максимуму;
δуст - усталена похибка; уст=1 – ()=1 – 1=0,05
hmax= 1,5- максимальне значення регульованої величини;
 =
1
- усталене значення вихідної регульованої
величини;
=
1
- усталене значення вихідної регульованої
величини;
 - перерегулювання;
- перерегулювання;
T0 = 5,15 c - період коливань.
A1 =0,5, A2 = 0,19.
 -
коливальність.
-
коливальність.
Кількість коливань на протязі часу регулювання: N=3.
Висновок:
Знайдені показники якості нас задовольняють, але для покращення якості системи бажано зменшити час регулювання tр з 12,21 до 12с, крім того зменшити перерегулювання до 33% і усунути усталену похибку.
9. Шляхом моделювання процесів на еом побудувати перехідну характеристику системи за каналом збурюючої дії.
Для моделювання перехідного процесу за каналом збурення створимо модель в Matlab:

Рис.9.1 Структурна схема системи за каналом збурення
Провівши моделювання процесу за каналом збурення отримали слідуючу перехідну характеристику.
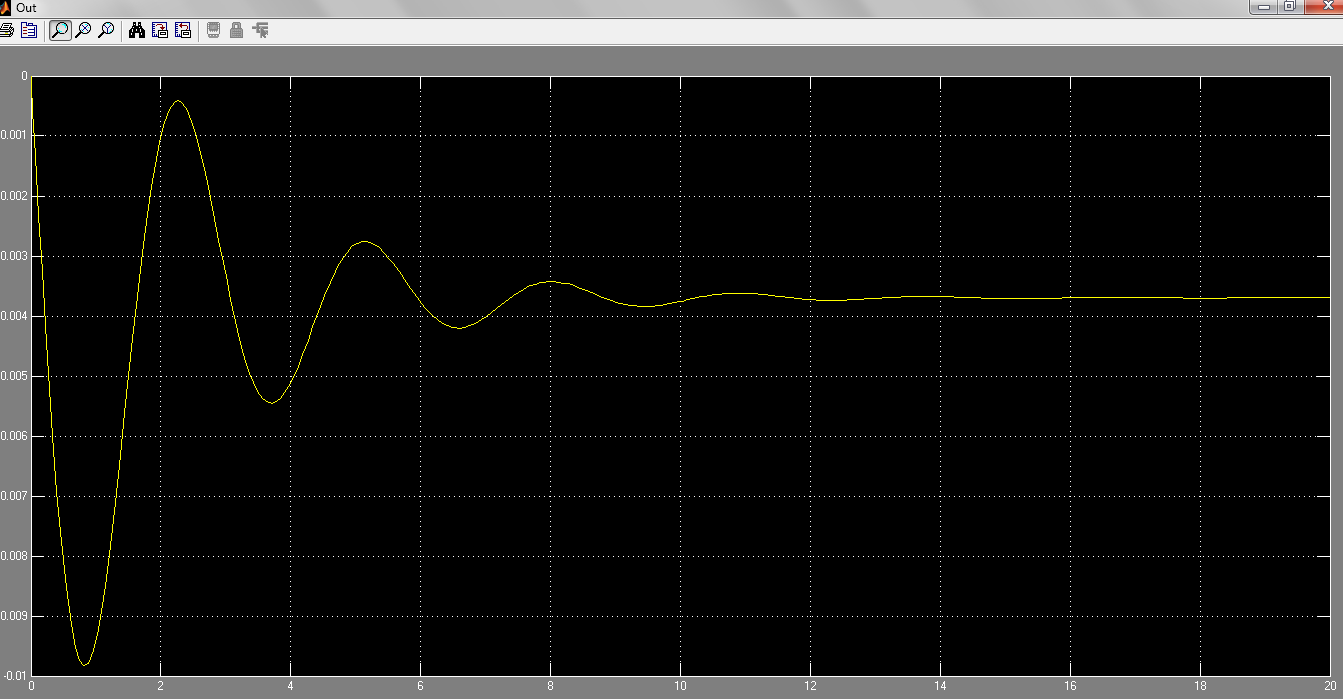
Рис 9.2 Перехідна характеристика системи за каналом збурюючої дії
Висновок: шляхом моделювання процесів на ЕОМ ми побудували перехідну характеристику системи за каналом збурюючої дії, яка знаходиться у від’ємній півплощині що характеризує від’ємний (негативний) вплив збурюючого сигналу на систему. Тому на виході системи отримується сигнал менший ідеального.