

20. Понятие сочлененной системы тел.
21. Статически определимые и статически неопределимые системы тел (конструкции).
Если при рассмотрении заданной системы, находящейся в равновесном состоянии от действия заданных внешних нагрузок, все реакции в связях закрепления, а также внутренние усилия в ее элементах, можно определить только по методу сечений, без использования дополнительных условий, то такая система называется статически определимой.
В реальной практике встречаются такие конструкции при расчете которых одних лишь уравнений равновесия оказывается недостаточно, в связи с чем требуется формулирование дополнительных уравнений, связанных с условиями деформирования конструкции.
Системы, в которых количество наложенных связей больше, нежели число независимых уравнений равновесия, называются статически неопределимыми.
По сравнению со статически определимыми системами, в статически неопределимых системах имеются дополнительные связи, которые называются лишними.
Термин “лишние связи” является условным. Эти связи являются лишними с точки зрения расчетных предпосылок. В действительности эти связи создают дополнительные резервы для конструкций, как в плане обеспечения её жесткости, так и прочности.
Степень статической неопределимости равна разности между числом неизвестных и числом полезных уравнений равновесия.
Для раскрытия статической неопределимости существуют разные способы:
1.Метод сил. Здесь в качестве неизвестных рассматриваются усилия - силы и моменты.
2.Метод перемещений. Неизвестными являются деформационные факторы - углы поворотов и линейные смещения.
3.Смешанный метод. Здесь часть неизвестных представляет собой усилия, а другая часть - перемещения.
4. Комбинированный метод. Используется при расчете симметричных систем на несимметричные нагрузки. Оказывается, что на симметричную составляющую заданной нагрузки систему целесообразно рассчитывать методом перемещений, а на обратносимметричную составляющую - методом сил.
Заметим лишь, что всякая реакция возникает в местах наложения внешних связей (ограничений движения системы). Нет ограничения — нет реакции. Есть ограничение — есть реакция. В то же время любая наложенная связь (любое ограничение движения) позволяет составить дополнительное уравнение, называемое уравнением совместности перемещений. В результате появляется возможность сделать число уравнений равным числу неизвестных и решить систему уравнений.
Пример статически неопределимых систем
22. Равновесие тел при наличии трения скольжения.
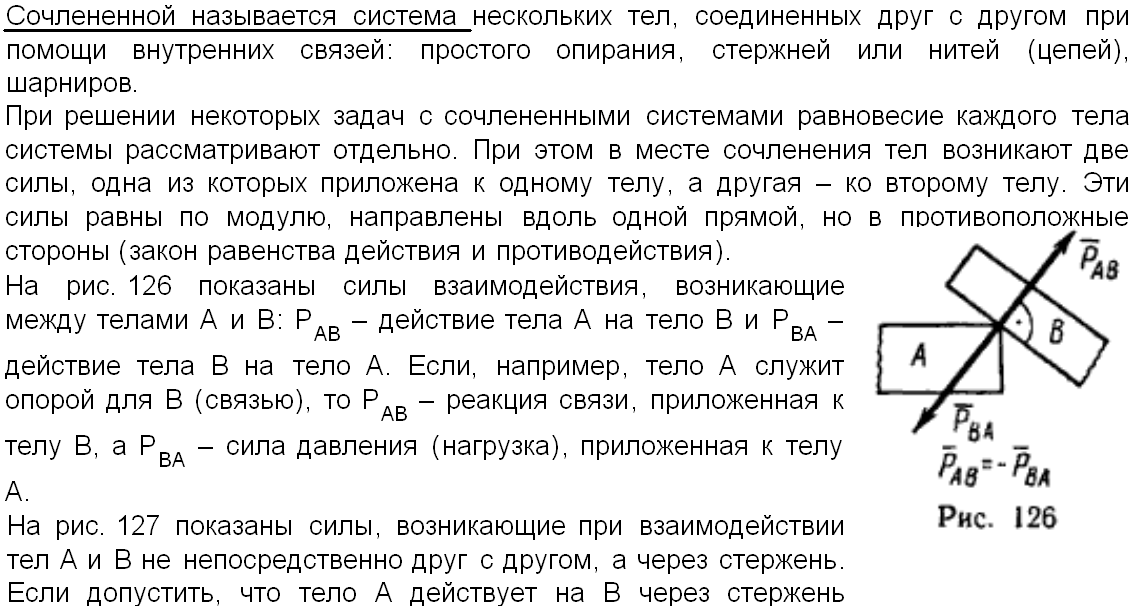
Е сли
два тела I и II (рис. 6.1) взаимодействуют
друг с другом, соприкасаясь в точке А,
то всегда реакцию RA,
действующую, например, со стороны тела
II и приложенную к телу I, можно разложить
на две составляющие: NA,
направленную по общей нормали к
поверхности соприкасающихся тел в точке
А, и ТА,
лежащую в касательной плоскости.
сли
два тела I и II (рис. 6.1) взаимодействуют
друг с другом, соприкасаясь в точке А,
то всегда реакцию RA,
действующую, например, со стороны тела
II и приложенную к телу I, можно разложить
на две составляющие: NA,
направленную по общей нормали к
поверхности соприкасающихся тел в точке
А, и ТА,
лежащую в касательной плоскости.
С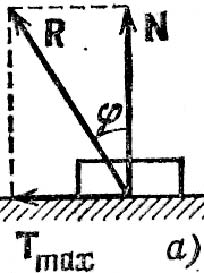 оставляющая
NA
называется нормальной реакцией, сила
ТА
называется силой трения скольжения —
она препятствует скольжению тела I по
телу II. В соответствии с аксиомой 4
(третьим законом Ньютона) на тело II со
стороны тела I действует равная по
модулю и противоположно направленная
сила реакции. Ее составляющая,
перпендикулярная касательной плоскости,
называется силой нормального давления.
Сила трения ТА
= 0, если соприкасающиеся поверхности
идеально гладкие. В реальных условиях
поверхности шероховаты и во многих
случаях пренебречь силой трения нельзя.
Максимальная сила трения приближенно
пропорциональна нормальному давлению,
т. е. Tmax=fN– закон Амонтона—Кулона.
Коэффициент f называется коэффициентом
трения скольжения. Его значение не
зависит от площади соприкасающихся
поверхностей, но зависит от материала
и степени шероховатости соприкасающихся
поверхностей.
оставляющая
NA
называется нормальной реакцией, сила
ТА
называется силой трения скольжения —
она препятствует скольжению тела I по
телу II. В соответствии с аксиомой 4
(третьим законом Ньютона) на тело II со
стороны тела I действует равная по
модулю и противоположно направленная
сила реакции. Ее составляющая,
перпендикулярная касательной плоскости,
называется силой нормального давления.
Сила трения ТА
= 0, если соприкасающиеся поверхности
идеально гладкие. В реальных условиях
поверхности шероховаты и во многих
случаях пренебречь силой трения нельзя.
Максимальная сила трения приближенно
пропорциональна нормальному давлению,
т. е. Tmax=fN– закон Амонтона—Кулона.
Коэффициент f называется коэффициентом
трения скольжения. Его значение не
зависит от площади соприкасающихся
поверхностей, но зависит от материала
и степени шероховатости соприкасающихся
поверхностей.
Силу трения можно вычислить по ф-ле T=fN только если имеет место критический случай. В других случаях силу трения следует определять из уравнений равновесия. На рисунке показана реакция R (здесь активные силы стремятся сдвинуть тело вправо). Угол j между предельной реакцией R и нормалью к поверхности называется углом трения. tgφ=Tmax/N=f.
 Геометрическое
место всех возможных направлений
предельной реакции R образует коническую
поверхность — конус трения. Если
коэффициент трения f во всех направлениях
одинаков, то конус трения будет круговым.
В тех случаях, когда коэффициент трения
f зависит от направления возможного
движения тела, конус трения не будет
круговым. Если равнодействующая активных
сил находится внутри конуса трения, то
увеличением ее модуля нельзя нарушить
равновесие тела; для того чтобы тело
начало движение, необходимо (и достаточно),
чтобы равнодействующая активных сил F
находилась вне конуса трения.
Геометрическое
место всех возможных направлений
предельной реакции R образует коническую
поверхность — конус трения. Если
коэффициент трения f во всех направлениях
одинаков, то конус трения будет круговым.
В тех случаях, когда коэффициент трения
f зависит от направления возможного
движения тела, конус трения не будет
круговым. Если равнодействующая активных
сил находится внутри конуса трения, то
увеличением ее модуля нельзя нарушить
равновесие тела; для того чтобы тело
начало движение, необходимо (и достаточно),
чтобы равнодействующая активных сил F
находилась вне конуса трения.
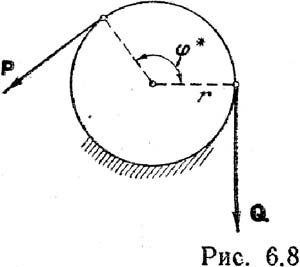
Рассмотрим трение гибких тел. Формула Эйлера помогает найти наименьшую силу P, способную уравновесить силу Q. P=Qe-fj*. Можно так же найти такую силу P, способную преодолеть сопротивление трения вместе с силой Q. В этом случае в формуле Эйлера поменяется только знак f: P=Qefj*.