

4. Аксиомы статики.
Все теоремы и уравнения статики выводятся из нескольких исходных положений, принимаемых без математических доказательств и называемых аксиомами или принципами статики. Аксиомы статики представляют собой результат обобщений многочисленных опытов и наблюдений над равновесием и движением тел, неоднократно подтвержденных практикой.
А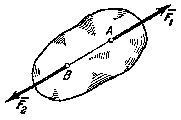 ксиома
1. Если
на свободное абсолютно твердое тело
действуют две силы, то тело может
находиться в равновесии тогда и только
тогда, когда эти силы равны по модулю
(F1
= F2)
и направлены вдоль одной прямой в
противоположные стороны. Аксиома
1 определяет простейшую уравновешенную
систему сил, так как опыт показывает,
что свободное тело, на которое действует
только одна сила, находиться в равновесии
не может.
ксиома
1. Если
на свободное абсолютно твердое тело
действуют две силы, то тело может
находиться в равновесии тогда и только
тогда, когда эти силы равны по модулю
(F1
= F2)
и направлены вдоль одной прямой в
противоположные стороны. Аксиома
1 определяет простейшую уравновешенную
систему сил, так как опыт показывает,
что свободное тело, на которое действует
только одна сила, находиться в равновесии
не может.
А ксиома
2. Действие
данной системы, сил на абсолютно твердое
тело не изменится, если к ней прибавить
или от нее отнять уравновешенную систему
сил. Эта
аксиома устанавливает, что две системы
сил, отличающиеся на уравновешенную
систему, эквивалентны друг другу.
ксиома
2. Действие
данной системы, сил на абсолютно твердое
тело не изменится, если к ней прибавить
или от нее отнять уравновешенную систему
сил. Эта
аксиома устанавливает, что две системы
сил, отличающиеся на уравновешенную
систему, эквивалентны друг другу.
Следствие из 1-й и 2-й аксиом. Действие силы на абсолютно твердое тело не изменится, если перенести точку приложения силы вдоль ее линии действия в любую другую точку тела.
А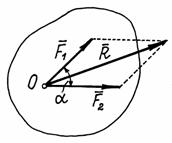 ксиома
3 (аксиома
параллелограмма сил). Две
силы, приложенные к телу в одной точке,
имеют равнодействующую, приложенную в
той же точке и изображаемую диагональю
параллелограмма, построенного на этих
силах, как на сторонах.
ксиома
3 (аксиома
параллелограмма сил). Две
силы, приложенные к телу в одной точке,
имеют равнодействующую, приложенную в
той же точке и изображаемую диагональю
параллелограмма, построенного на этих
силах, как на сторонах.
Вектор
![]() ,
равный диагонали параллелограмма,
построенного на векторах
,
равный диагонали параллелограмма,
построенного на векторах
![]() и
и
![]() , называется геометрической суммой
векторов
и
:
=
, называется геометрической суммой
векторов
и
:
=
![]() +
.
Конечно,
+
.
Конечно,
![]()
![]() +
+
![]() .
Такое равенство будет соблюдаться
только при условии, что эти силы направлены
по одной прямой в одну сторону. Если
же векторы сил окажутся перпендикулярными,
то
.
Такое равенство будет соблюдаться
только при условии, что эти силы направлены
по одной прямой в одну сторону. Если
же векторы сил окажутся перпендикулярными,
то
![]() ,
если нет то равнодействующая
,
если нет то равнодействующая
![]() .
Аксиому 3 можно еще формулировать так:
две силы,
приложенные к телу в одной точке, имеют
равнодействующую, равную геометрической
(векторной) сумме этих сил и приложенную
в той же точке.
.
Аксиому 3 можно еще формулировать так:
две силы,
приложенные к телу в одной точке, имеют
равнодействующую, равную геометрической
(векторной) сумме этих сил и приложенную
в той же точке.
А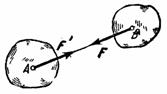 ксиома
4. При
всяком действии одного материального
тела на другое имеет место такое же по
величине, но противоположное по
направлению противодействие. Закон
о равенстве действия и противодействия
является одним из основных законов
механики. Из него следует, что если тело
А действует на тело В с силой
ксиома
4. При
всяком действии одного материального
тела на другое имеет место такое же по
величине, но противоположное по
направлению противодействие. Закон
о равенстве действия и противодействия
является одним из основных законов
механики. Из него следует, что если тело
А действует на тело В с силой
![]() ,
то одновременно тело В действует на
тело А с такой же по модулю и направленной
вдоль той же прямой, но противоположную
сторону силой
=-
.
Однако силы и не образуют уравновешенной
системы сил, так как они приложены к
разным телам.
,
то одновременно тело В действует на
тело А с такой же по модулю и направленной
вдоль той же прямой, но противоположную
сторону силой
=-
.
Однако силы и не образуют уравновешенной
системы сил, так как они приложены к
разным телам.
Аксиома 5 (принцип отвердевания). Равновесие изменяемого (деформируемого) тела, находящегося под действием данной системы сил, не нарушится, если тело считать отвердевшим (абсолютно твердым).
Высказанное в этой аксиоме утверждение очевидно. Например, ясно, что равновесие цепи не нарушится, если ее звенья считать сваренными друг с другом и т. д.
5. Связи и их реакции. Принцип освобождаемости от связей.
Тело, которое может совершать из данного положения любые перемещения в пространстве, называется свободным. Тело, перемещениям которого препятствуют какие-нибудь другие, скрепленные или соприкасающиеся с ним тела, называется несвободным. Все то, что ограничивает перемещение данного тела, называют связью.
Сила, с которой данная связь действует на тело, препятствующая тем или иным его перемещениям, называется реакцией связи. Реакция связи направлена в сторону противоположную той, куда связь не дает перемещаться телу.
Принцип освобождаемости от связей: несвободное твердое тело можно рассматривать как свободное, если его мысленно освободить от связей, заменив их действие реакциями. В статике этот принцип позволяет рассматривать равновесие несвободного твердого тела как свободного под действием активных (заданных) сил и реакций связей. Рассмотрим наиболее часто встречающиеся типы связей на плоскости и направления их реакций.
1. Гладкая плоскость (поверхность) или опора

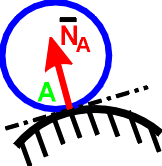 Реакция
N гладкой плоскости (поверхности) или
опоры направлена по общей нормали к
поверхностям соприкасающихся тел в
точке их касания и приложена к этой
точке.
Реакция
N гладкой плоскости (поверхности) или
опоры направлена по общей нормали к
поверхностям соприкасающихся тел в
точке их касания и приложена к этой
точке.

2. Гибкая нить (провода, канаты, цепи, ремни)
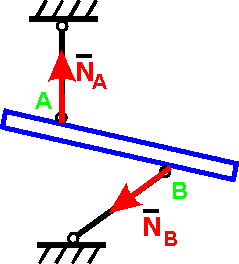 Реакция
Т направлена вдоль нити к точке подвеса.
Реакция
Т направлена вдоль нити к точке подвеса.
3. Невесомый стержень с шарнирами
Реакция N невесомого стержня направлена вдоль стержня. Обычно реакция N изображается от тела по стержню, в предположении, что в равновесии стержень растянут.
4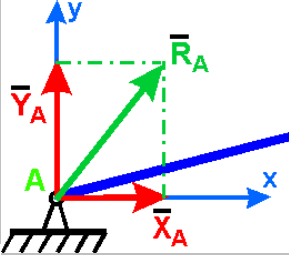 .
Неподвижный цилиндрический шарнир или
подшипник
.
Неподвижный цилиндрический шарнир или
подшипник
Реакция RA цилиндрического шарнира может иметь любое направление в плоскости, перпендикулярной оси вращения, т. е. в плоскости АХУ. Обычно ее раскладывают на две составляющие ХА и YA по двум взаимноперпендикулярным направлениям.
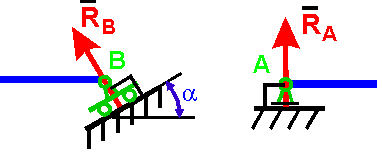
5. Шарнирно-подвижная опора (опора на катках)
Реакция R проходит через ось шарнира и направлена перпендикулярно к опорной плоскости.
6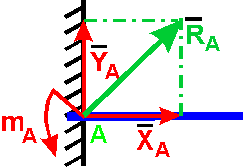 .
Жесткая заделка
.
Жесткая заделка
Нахождение реакции жесткой заделки сводится к определению составляющих ХА и YA препятствующих линейному перемещению балки в плоскости действия сил, и алгебраической величине момента mA, препятствующего вращению балки под действием приложенных к ней сил.
6. Понятие о главном векторе. Основные способы его вычисления.
Системой сходящихся сил называется система сил, линии действия которых пересекаются в одной точке. Две силы, сходящиеся в одной точке, согласно третьей аксиоме статики можно заменить одной силой – равнодействующей.
Решение многих задач статики связано с операцией сложения векторов, в частности, сил.
Главный вектор системы сил – величина, равная геометрической сумме сил системы. Главный вектор системы сил не следует путать с равнодействующей. Равнодействующая – всегда главный вектор, а главный вектор равен равнодействующей, если система сил является сходящейся.
Равнодействующую плоской системы сходящихся сил можно определить графически и графоаналитически.
Сложение двух сил. При графическом определении равнодействующей на чертеже и выбранном масштабе изображаются силы, затем они складываются по правилу параллелограмма. По длине диагонали параллелограмма, учитывая выбранный масштаб, определяется равнодействующая, равная сумме слагаемых сил. Точность определения равнодействующей зависит в этом случае от точности построения силового треугольника.
Г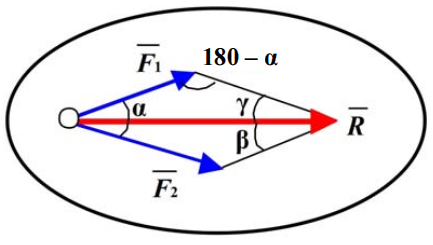 рафоаналитический
способ
сложения сил позволяет более точно
определить равнодействующую, используя
тригонометрические зависимости:
рафоаналитический
способ
сложения сил позволяет более точно
определить равнодействующую, используя
тригонометрические зависимости:
- теорему косинусов:
![]() или
или
![]()
- теорему синусов:
![]()
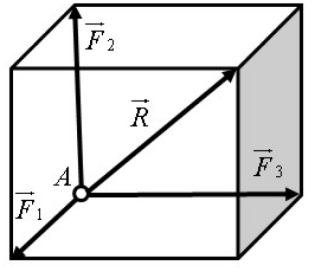
Сложение
трех сил,
не лежащих в одной плоскости: геометрическую
сумму
![]() трех сил
трех сил
![]() не лежащих в одной плоскости, изображают
диагональю параллелепипеда, построенного
на этих силах (правило параллелепипеда).
не лежащих в одной плоскости, изображают
диагональю параллелепипеда, построенного
на этих силах (правило параллелепипеда).
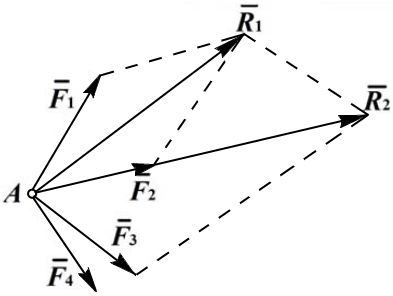
Сложение системы сил. Сложение плоской системы сходящихся сил осуществляется либо путём последовательного сложения сил с построением промежуточной равнодействующей (1), либо путём построения силового многоугольника (2).
 1
2
1
2
