

4.2. Основные операции над графами
В ряде задач теории графов используются двуместные операции над графами:
1).
Дополнением графа G1(V1,
E1) называется
граф
![]() ,
множеством вершин которого является
множество V1, а
множеством его ребер является множество
,
множеством вершин которого является
множество V1, а
множеством его ребер является множество
![]()
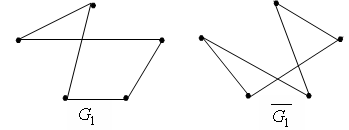
Рис. 4.5
2). Объединением графов G1(V1, E1) и G2(V2, E2) называется граф G1(V1, E1) G2(V2, E2), множество вершин которого есть объединение множеств вершин графов G1 и G2 V = V1 V2, а множество ребер является объединением множеств ребер этих графов E = E1 E2.
3). Пересечением графов G1(V1, E1) и G2(V2, E2) называется граф G1(V1, E1) G2(V2, E2), множество вершин которого есть множество V = V1 V2, а множество ребер является множество E = E1 E2. (только те ребра, и вершины, которые принадлежат обоим графам).
4).
Суммой по модулю два графов G1(V1,
E1) и G2(V2,
E2) называется
граф G1(V1,E1)
G2(V2,E2),
порожденный на множестве ребер
![]() ,
т.е. на множестве ребер, присутствующих
либо в G1, либо
в G2, но не
принадлежащих их пересечению E
= E1
E2.
,
т.е. на множестве ребер, присутствующих
либо в G1, либо
в G2, но не
принадлежащих их пересечению E
= E1
E2.
5). Простейшая операция - удаление ребра. При удалении ребра сохраняются все вершины графа и все его ребра, кроме удаляемого. Обратная операция - добавление ребра.
6). При удалении вершины вместе с вершиной удаляются и все инцидентные ей ребра. Граф, получаемый из графа G удалением вершины v, обозначают G-v. При добавлении вершины к графу добавляется новая изолированная вершина. С помощью операций добавления вершин и ребер можно "из ничего", то есть из графа G, построить любой граф.

Рис. 4.6
7). Операция стягивания ребра E определяется следующим образом. Вершины v1 и v2 удаляются из графа, к нему добавляется новая вершина v3 и она соединяется ребром с каждой вершиной, с которой была смежна хотя бы одна из вершин v1 и v2 (рис. 4.7, 2).
8). Операция подразбиения ребра e действует следующим образом. Из графа удаляется это ребро, к нему добавляется новая вершина v1 и два новых ребра e1 и e2 (рис. 4.7, 3).

1) 2) 3)
Рис. 4.7
4.3. Матрицы графов
Матрица смежности графа G с конечным числом вершин n (пронумерованных числами от 1 до n) — это квадратная матрица A размера n, в которой значение элемента aij равно числу ребёр из i-й вершины графа в j-ю вершину. Матрица смежности простого графа (не содержащего петель и кратных ребер) является бинарной матрицей и содержит нули на главной диагонали.
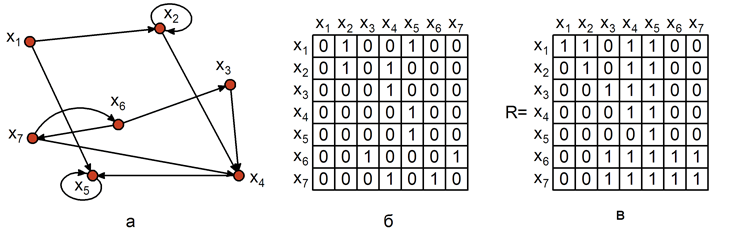
Рис. 4.8 – Граф, матрица смежности (б), матрица достижимости (в) графа
Достижимость в графе описывается матрицей достижимости
R = [rij],
i, j = 1, 2, ... n, где n – число вершин графа, а каждый элемент определяется следующим образом:
rij = 1, если вершина vj достижима из vi ,
rij=0, в противном случае.
Множество вершин R(vi) графа G, достижимых из заданной вершины vi, состоит из таких элементов vi, для которых (i, j)-й элемент в матрице достижимостей равен 1.
Матрица инциденций представляет собой прямоугольную матрицу размером n x m, где n – количество вершин графа, а m – количество дуг графа. Обозначается матрица инциденций B = {bij}, i = 1, 2, ..., n, j = 1, 2, ..., m.
Каждый элемент матрицы определяется следующим образом:
bij = 1, если vi является начальной вершиной дуги ej,
bij = –1, если vi является конечной вершиной дуги ej,
bij = 0, если vi не является концевой вершиной дуги ej или если ej является петлей.


Рис. 4.9 – Граф и его матрица инциденций
Для неориентированного графа, матрица инциденций определяется так же, за исключением того, что все элементы, равные –1, заменяются на 1.