

Принцип работы д-регулятора
Как отмечалось ранее, недостатком пропорциональных регуляторов является неспособность адекватно реагировать на возмущающее воздействие в начале переходного процесса, что приводит к снижению качества регулирования, а именно: возникают колебания регулируемой величины, и процесс регулирования затягивается.
Для устранения этого недостатка разработаны регуляторы, вырабатывающие регулирующее воздействие по скорости изменения ошибки.
Если регулирующее воздействие регулятора пропорционально скорости изменения регулируемой величины, то такой регулятор называется дифференциальным.

Рисунок 1.7– Модель САР с Д-регулятором
Вернемся к примеру ручного регулирования (см. этап 2). Вспомним, что для того, чтобы остановить понижение уровня воды, мы медленно открывали вентиль [A] и осуществили регулирование по аналогии с действием пропорциональной составляющей автоматического регулятора с широкой зоной пропорциональности (ЗП).
Чтобы ускорить процесс регулирования, можно открывать вентиль [A] быстрее. В этом случае потребуется неоднократно прикрывать и снова открывать вентиль [A], для уменьшения возникающих колебаний уровня воды. Регулирование будет проходить по аналогии с действием пропорциональной составляющей в регуляторе с оптимальной ЗП (см. рисунок 1.3).
Система находится в равновесии. Поток [Y1] равен потоку [Z1]; уровень зафиксирован у отметки [Xо] (см. рисунок 1.7).
Откроем больше вентиль [B], повернув его в положение [b2].
Поток выливающейся воды из бака увеличится до величины [Z2], и уровень в баке начнет понижаться. Сделаем примерную оценку возмущающего воздействия (насколько увеличился поток выливающейся воды из бака) по скорости понижения уровня воды в водомерном стекле и, соответственно, откроем вентиль [A] так, чтобы поток вливающейся воды [Y3] был заведомо больше потока выливающейся воды [Z2]. Причем для этого вентиль [A] должен быть повернут в положение [a4].
Так как мы имеем дело с большой инерционной системой (бак с водой) и все процессы протекают со значительной задержкой, начнем прикрывать вентиль [A] не дожидаясь конечного результата изменения регулируемой величины, пытаясь приблизить величину потока [Y] к величине потока [Z2].
В результате будет осуществлено регулирующее воздействие, которое благодаря “ударному”, мощному характеру практически остановило понижение уровня воды в баке на начальной стадии переходного процесса.
Сбалансируем оба потока, приоткрывая и прикрывая вентиль [A], тем самым зафиксируем новое положение уровня.
В рассмотренном примере регулирование выполнено в такой же последовательности, как и в ПД-регуляторе, где:
а) процесс регулирования аналогичный, как при работе дифференциальной составляющей автоматического регулятора;
б) процесс регулирования аналогичный, когда на затухающую дифференциальную составляющую накладывается пропорциональная составляющая;
в) регулирование подобное действию пропорциональной составляющей;
г) новое устойчивое состояние.
Дифференциальное воздействие не является точным, и его величина устанавливается заранее при настройке регулятора. Параметры настройки рассчитывают, используя данные, полученные в ходе исследования реакции САР на возмущающее воздействие.
В чистом виде дифференциальный регулятор не применяется, а совмещается с пропорциональным регулятором или пропорционально-интегральным.
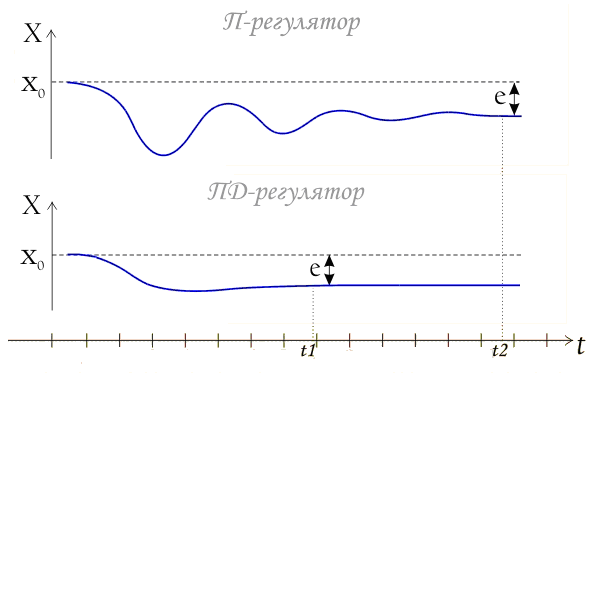
Рисунок 1.8 – Сравнение П и ПД-регуляторов
Пропорционально-интегральный-дифференциальный регулятор – это регулятор непрямого действия, в котором наряду с жесткой обратной связью (ОС) имеется положительная гибкая обратная связь (ПОС) и отрицательная гибкая обратная связь (ООС).
В ПИД-регуляторах, благодаря дифференциальной составляющей, процесс регулирования происходит быстрее, чем в ПИ-регуляторах. Во многих случаях, когда процесс регулирования характеризуется высокой динамичностью, как например, в САР регулирования потока или давления, дифференциальную составляющую исключают, чтобы избежать явления самовозбуждения.