

Data-set –тип ручной установки нуля
Этот тип ручной установки нуля используется как процедура установки позиции с JOG-операцией. Т.е. рабочий орган не перемещается по команде установки нуля, а система записывает в память нынешнюю позицию как нулевую.
Последовательность процесса установки нуля:
1. Рабочий орган движется в заданном направлении.
2. Запускается команда ручной установки нуля.
3. Записывается адрес нынешней позиции как нулевой точки.
Stopper –тип ручной установки нуля
Модуль движется до тех пор, пока не упрется в какой-либо объект на его пути, либо пока не дойдет до конца своего пути. Эта точка определяется и записывается в память как нулевая. Stopper –тип ручной установки нуля включает в себя следующие два режима:
Stopper-тип 1(рисунок 4.18)
В этом методе возвращения нуля используются DOG сигнал и упор.
Перемещения с высокой скоростью возможно при использовании DOG-сигнала, так этот тип возвращения нуля сокращает время возврата.
Stopper-тип 2 (рисунок 4.19)
В этом методе используется возвращение нуля только с помощью упора.
1.Stopper –тип 1
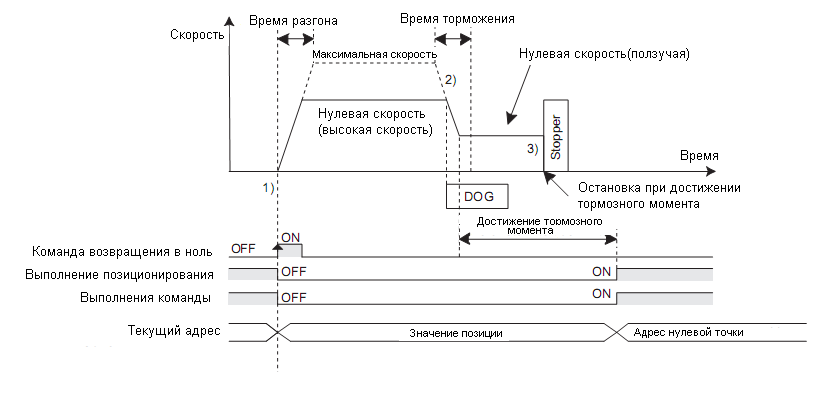
Рисунок 4.18 – Принцип работы Stopper1-режима возвращения нуля
1) По возрастающему фронту (OFF→ON) по команде возвращения в ноль, рабочий орган движется в направлении нулевой точки с высокой скоростью.
2) При подходе к нулевой точке, скорость движения замедляется.
3) Рабочий орган касается упора и останавливается, когда момент серводвигателя достигает предельного значения.
4) После остановки 20SSC-H записывает новый адрес нулевой точки.
2. Stopper –тип 2
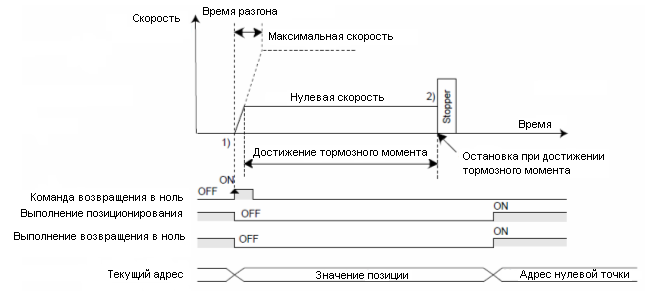
Рисунок 4.19 – Принцип работы Stopper2-режима возвращения нуля
1. По возрастающему фронту (OFF→ON) по команде возвращения в ноль, рабочий орган движется в направлении нулевой точки с высокой скоростью.
2. Рабочий орган касается упора и останавливается, когда момент серводвигателя достигает предельного значения.
3. После остановки 20SSC-H записывает новый адрес нулевой точки.
Практическая часть Программа выполнения лабораторной работы
1. Изучить принцип работы сервопривода.
2. Ознакомиться с конструкцией лабораторного стенда.
3. Изучить назначение модулей ПЛК.
4. Ознакомиться с функциями и назначением фильтров сервопривода.
5. Выполнить лабораторную работу.
5.1. Настроить стенд.
5.2. Определить резонансную частоту сервопривода в автоматическом режиме. Скопировать полученный график.
5.3. Научиться изменять параметры сервопривода при помощи специальных программных продуктов.
5.4. Определить резонансную частоту сервопривода в ручном режиме. Скопировать полученный график.
5.5. Сравнить графики и сделать выводы.
6. Сделать отчет. В отчете отразить все графики, полученные в ходе выполнения лабораторной работы, описание изменяемых параметров, выводы.
Методика выполнения лабораторной работы
Для определения резонансной частоты и частоты вибрации в автоматическом режиме необходимо выполнить следующие пункты.
Поднимите защитный экран на сервоусилителе MR-J3B и установите (аккуратно!!!) левый переключатель в верхнее положение, тем самым активировать тестовый режим работы.
Подсоедините груз винтом к каретке линейного сервопривода.
Включите стенд путем нажатия переключателя в правом верхнем углу.
Соедините с помощью USB-miniUSB кабеля сервоусилитель MR-J3B и компьютер. Коннектор MiniUSB подключается в разъем на лицевой панели сервоуселителя, а коннектор USB непосредственно в компьютер.
Запустите на компьютере программу MR Configurator. Ярлык программы располагается на рабочем столе компьютера.
Зайдите во вкладку Setup->System settings и выберите Model Selection-> MR-J3-B, там же установите значение Online.
Зайдите во вкладку Advanced function->Machine analyzer.
Нажмите на кнопку Start, 3 раза OK и подождите, пока обрабатываются данные.
После построения амплитудно-частотной характеристики на графике на экране желтым цветом будет отмечена частота вибрации, а красным цветом резонансная частота нашей системы. Запишите эти значения в отчёт. Закройте вкладку анализа.
Для определения резонансной частоты и частоты вибрации в ручном режиме необходимо выполнить следующие пункты:
Выключите стенд переключателем в правом верхнем углу.
Установите левый переключатель в нижнее положение (нормальный режим работы).
Соедините проводом входящим в комплект лабораторной установки любой ключ(S0…S7) со входом ПЛК X11 на лицевой панели лабораторного стенда.
Включите стенд путем нажатия переключателя в правом верхнем углу.
Запустите контроллер, переведя его в состояние выполнения программы STOP->RUN. Для этого на контроллере переключатель переведите в положение RUN.
Проследите за тем, что бы в MR Configurator индикация в верху панели программы стояла ONLINE (если OFF LINE нажмите на неё и она переключится в режим ONLINE).
З
 айдите
в меню построения графиков, кликнув по
кнопке WAVE,
на верхней панели программы MR
Configurator(значок
) Перед вами появится окно выбора
построения графиков.Установите все
как показано на рисунке 5.1, затем нажните
OK.
айдите
в меню построения графиков, кликнув по
кнопке WAVE,
на верхней панели программы MR
Configurator(значок
) Перед вами появится окно выбора
построения графиков.Установите все
как показано на рисунке 5.1, затем нажните
OK.
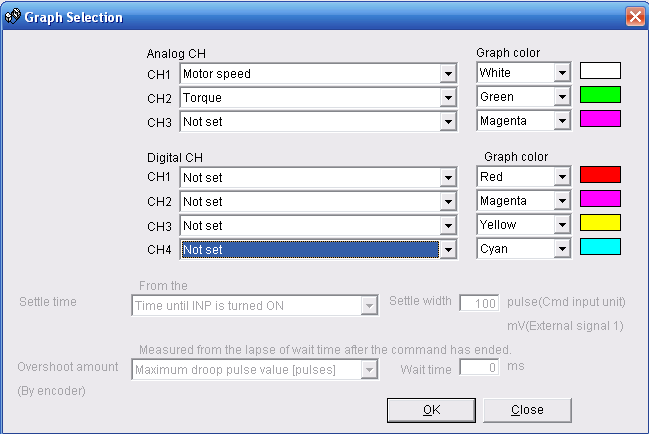
Рисунок 5.1 – Установки выбора графика
Установленные параметры означают:
Motor speed – скорость вращения вала двигателя, об./мин.
Torque –момент на валу двигателя, % от номинального.
Зайдите в меню Trigger и произведите выбор значения скорости, при котором будет начата запись данных с сервоусилителя (скорость и момент), и установите все параметры как на рисунке 5.2. Нажмите ОК.
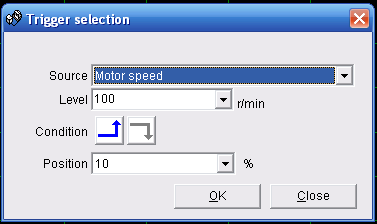
Рисунок 5.2 – Настройка триггера
Запустите процесс построения графиков, кликнув по кнопке PLAY.
Включите X11, замкнув соответствующий ключ (см. пункт 7).
После построения графиков оптимизируйте их, кликнув по кнопке V-scale Optimization. Скопируйте их в отчет. После построений выключите вход X11.
Вкладку Trend graph нужно свернуть.
Для изменения параметров фильтров для подавления вибраций необходимо выполнить следующие пункты: