

Дополнительный режим подавления вибраций
Используется для более глубокого снижения вибраций механизма, в частности, для снижения вибрации обрабатываемой детали и/или станины станка. Действие функции основано на влиянии на алгоритм позиционирования.
С помощью этой функции (параметр РВ02) автоматически определяется частота вибрации машины при конечном позиционировании.
После заданного количества циклов происходит переключение на ручной режим. В ручном режиме с помощью фильтра подавления вибрации можно изменить настройку частоты вибрации (РВ19) и резонансной частоты (РВ20).
На рисунке 4.14 приведены автоматически устанавливаемые параметры для настройки дополнительного режима подавления вибраций.
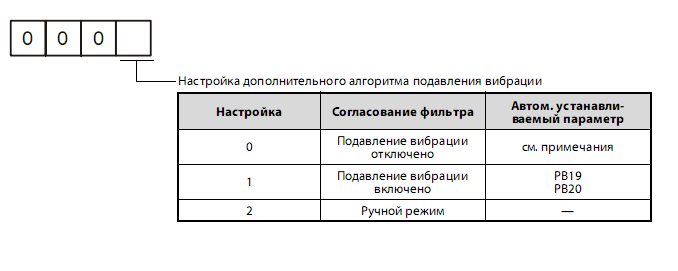
Рисунок 4.14 – Автоматически устанавливаемые параметры для настройки дополнительного режима подавления вибраций
Эта функция активируется установкой параметра РА08 (автонастройка) в состояние "Автонастройка 2" ("0002") или "Ручной режим" ("0003").
Ручная настройка фильтра для подавления вибрации
С помощью функции диагностики механизма в программе MR-Configurator можно измерить параметры вибрации. Для этого следует вручную настроить частоту вибрации (параметр РВ19) и резонансную частоту (параметр РВ20) фильтра для подавления вибрации.
Пик вибрации можно определить с помощью программы MR-Configurator (рисунок 4.15) или внешнего измерительного прибора (анализатор частот).
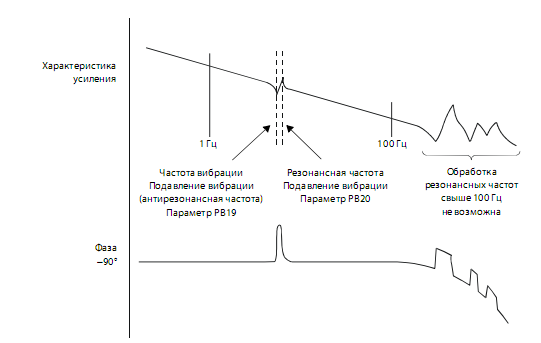
Рисунок 4.15 – Определение вибрации с помощью программы MR-Configurator или внешнего измерительного прибора
Если резонансную и антирезонансную частоту удалось определить путем диагностики механизма или с помощью анализатора частот, не настраивайте частоту вибрации и резонансную частоту подавления вибрации, т.к. это может привести к выходу из строя сервопривода.
Фильтр нижних частот
При использовании в приводе шариковинтовых передач (и аналогичных) повышение быстродействия может привести к резонансам в области высоких частот. Поэтому заданное значение тока управления параметрами привода проходит через фильтр нижних частот. На заводе-изготовителе этот фильтр активирован.
Если параметр РВ23 установлен на «ХХ1Х», можно выбрать ручную настройку параметра РВ18, как показано на рисунке 4.16.
Свойства фильтра нижних частот устанавливаются во втором разряде параметра РВ23.
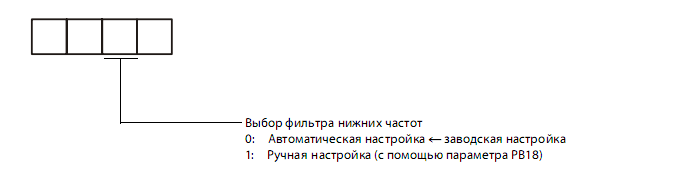
Рисунок 4.16 – Настройка фильтра нижних частот
В жесткой системе, имеющей малую склонность к резонансу, фильтр нижних частот можно отключить, чтобы повысить динамику и, тем самым, уменьшить время позиционирования.
Более подробно о параметрах сервоусилителей см. мануал MR-J3-B у преподавателя п 4.5 (стр. 4-15 – 4-42).
4.5 Установка нулевой точки
Существуют 3 основных типа ручной установки нуля (нулевой точки):
DOG (data origin-начало отсчета данных)-тип ручной установки нуля.
Data-set –тип ручной установки нуля
Stopper –тип ручной установки нуля
Dog (data origin-начало отсчета данных)-тип ручной установки нуля
Принцип работы DOG-режима установки нуля показан на рисунке 4.17.
Пуск установки нуля, как изложено ниже, осуществляется по возрастающему фронту (OFF→ON) командой механической установки нуля.
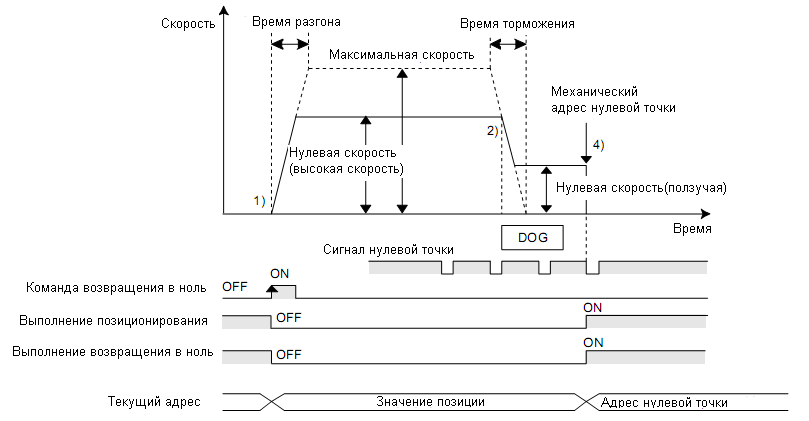
Рисунок 4.17 –Принцип работы DOG-режима установкия нуля
1) По возрастающему фронту (OFF→ON) по команде установки в нуль рабочий орган движется в направлении нулевой позиции с высокой скоростью.
2) На DOG-входе модуль 20SSC-H замедляет работу рабочего органа до минимальной скорости.
3) 20SSC-H считает количество сигналов от датчиков положения.
4) После отсчета заданного количества 20SSC-H останавливает рабочий орган.
5) После достижения нулевой точки рабочий орган не будет двигаться по команде установки в нуль.