

Двигатели, используемые в сервоприводах
На рисунке 4.4 приведена классификация двигателей, используемых в сервоприводах.
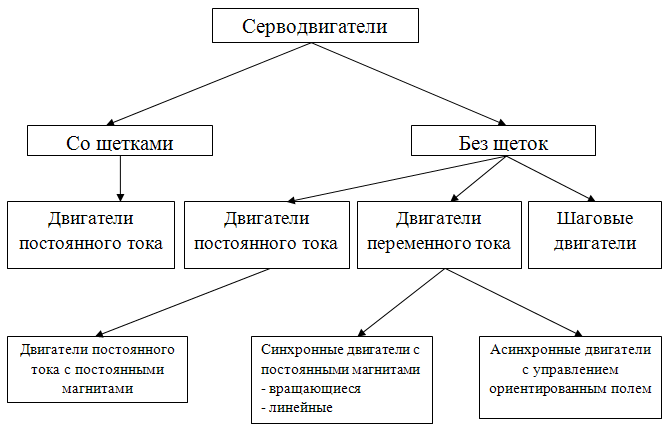
Рисунок 4.4 – Классификация двигателей, используемых в сервоприводах
В лабораторном стенде используются трехфазные синхронные электродвигатели с возбуждением от постоянных магнитов. Их основным достоинством является низкий момент инерции ротора относительно развиваемого крутящего момента. Устройство такого серводвигателя представлено на рисунке 4.5.
Частотно-регулируемые синхронные сервоприводы обладают высоким быстродействием, хорошо сочетаются с импульсными системами программного управления и могут использоваться в различных отраслях промышленности, где требуются следующие качества привода: позиционирование рабочих органов с высокой точностью; поддержание крутящего момента с высокой точностью; поддержание скорости перемещения или подачи с высокой точностью.
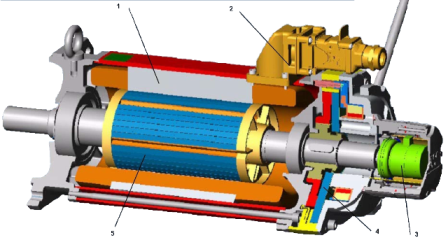
Рисунок 4.5 – Устройство синхронного серводвигателя:
1 - статор с обмоткой; 2 - разъем для подключений; 3 - датчик скорости и положения; 4 - электромагнитный тормоз; 5 - ротор с магнитами
Достоинства синхронного серводвигателя: высокая надежность, относительно большой момент на валу, возможность динамического торможения при пропадании питания, небольшие габариты и масса, высокий КПД. К недостаткам относится использование для управления двигателем сервоусилителя переменного тока, который намного сложнее, чем сервоусилитель постоянного тока.
4.3 Описание лабораторного стенда
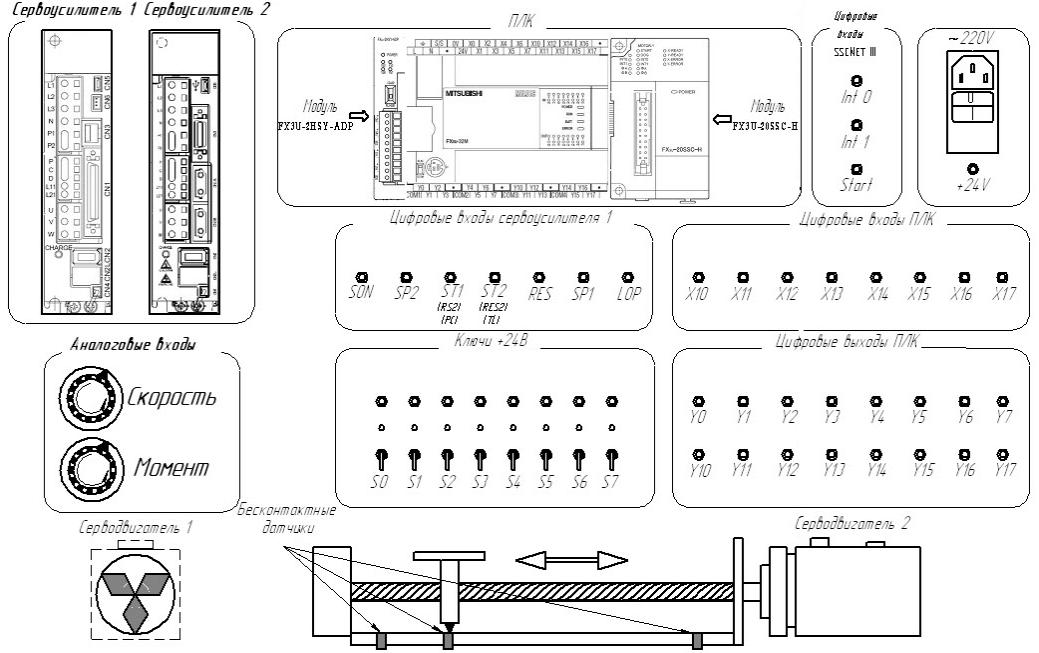
Рисунок 4.6 – Панель управления сервоприводами
На рисунке 4.6 изображена панель управления лабораторного стенда. На нем расположена система управления сервоприводами, которая представлена контроллером FX3U -32M с двумя модулями FX3U-20SSC-H и FX3U-2HSY-ADP.
Контроллер FX3u-32M имеет по 16 цифровых выходов и входов. 8 входов вынесены на переднюю панель стенда (X10-X17), входы X0-X6 подключены к выходам сервоусилителей, вход X7 не используется. Подачу сигнала +24B на вход контроллера можно произвести с помощью ключей, расположенных на передней панели стенда путем соединения специальным кабелем (он находится у преподавателя) ключа (S0-S7) и одного из входов ПЛК на лицевой панели стенда, либо непосредственно от сервоусилителей или от цифровых выходов самого контроллера, вынесенных на переднюю панель стенда (Y0-Y17) также специальным кабелем.
К контроллеру подключены 2 модуля: модуль позиционирования по двум осям FX3U-20SSC-H и высокоскоростной выходной адаптер FX3U-2HSY-ADP.
Модуль FX3U-20SSC-H позволяет реализовать в ПЛК серии FX3U высокопроизводительное управление позиционированием исполнительного органа. Он предназначен для использования 10 Мбит/с оптоволоконной сетью связи SSCNETIII. Сервоусилители MR-J3-В можно разместить на расстоянии до 50 метров от ПЛК, используя специальные оптоволоконные кабели. Модуль может выполнять значительное количество операций и обладает возможностями линейной и круговой интерполяции. Он присоединяется к правой расширительной шине.
Модуль FX3U-2HSY-ADP подключается с левой стороны FX3U и расширяет существующие возможности высокоскоростного импульсного выхода транзисторных главных блоков FX3U со 100 кГц до 200 кГц. FX3U-2HSY-ADP непосредственно направляет сигнал на высокоскоростные выходы в Y0, Y1, Y4, и Y5 или Y2, Y3, Y6, и Y7 (в зависимости от адреса адаптера). На ЦП FX3U можно использовать максимум два высокоскоростных выходных адаптера, что обеспечивает до четырех высокоскоростных выходов.
Сервоусилители MR-J3-10A и MR-J3-10B расположены в левом верхнем углу стенда, соответственно, сервоусилитель 1 и 2. Сервоусилитель MR-J3-10A может управляться с помощью контроллера через модуль FX3U-2HSY-ADP, а также через аналоговые входы – регулирование скорости и момента, и цифровые входы – задание направление вращения, скорости, смена режима вращения и т.д. Сервоусилитель MR-J3-10B управляется непосредственно от контроллера, через модуль FX3U-20SSC-H.
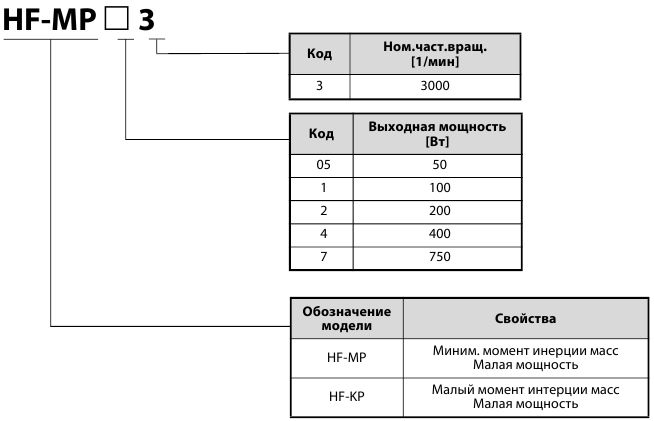
Рисунок 4.7 – Маркировка двигателей, используемых в лабораторном стенде
К сервоусилителям подключены серводвигатели модели HF-KP13, которые имеют низкий момент инерции и хорошо подходят к механизмам с переменным моментом инерции нагрузки или механизмам с низкой жесткостью. Разъяснение маркировки серводвигателей, используемых в лабораторной работе, представлено на рисунке 4.7.
Общие характеристики и характеристики управления сервоусилителей MR-J3-10A/B представлены в таблицах 4.1, 4.2.
Таблица 4.1- Общие характеристики MR-J3-10A/B
Источник питания |
Напряжение/частота |
3 фазы ~200-230 B, 50-60 Гц 1 фаза ~230 B, 50-60 Гц |
Допустимое откло-нение напряжения |
3 фазы ~170-253 B, 1 фаза ~207-253 B |
|
Допустимое откло-нение частоты |
+ 5% макс. |
|
Защитные функции |
Отключение по токовой перегрузке, отключение по перегрузке (перегрев электроники), защита серводвигателя от перегрева, защита от ошибки датчика положения, защита от ошибки регенерации, защита от понижения напряжения, защита от ввода неправильного значения параметра |
|
Таблица 4.2 - Характеристики управления MR-J3-10A
Режим управления положением
|
Максимальная частота входных импульсов |
500 тыс. импульсов в секунду |
Разрешение абсолютного энкодера |
131072 импульса/оборот |
|
Допустимая ошибка абсолютного энкодера |
±10 импульсов |
|
Режим управления скоростью |
Диапазон задания скорости |
Аналоговое задание ско-рости 1…2000 об/мин, цифровое задание скорости 1…5000 об/мин |
Аналоговое задание скорости |
0…±10В постоянного тока |
|
Режим управления моментом |
Напряжение задания момента |
0…±8В пост. тока (входной импеданс 10…12кОм) |
Схема включения MR-J3-10A
На рисунке 4.8 представлена схема подключения сервоусилителя MR-J3-10A к контроллеру FX3U.
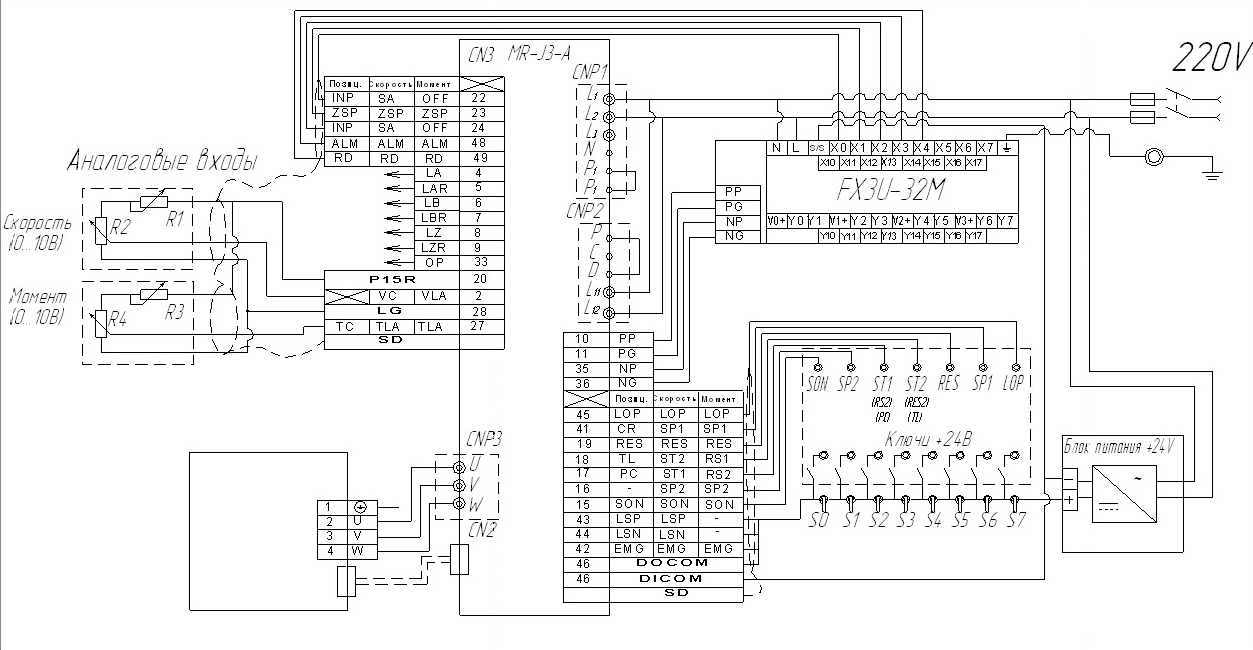
Рисунок 4.8 – Схема включения MR-J3-10A
Назначение входов-выходов сервоуселителя, используемых в лабораторной работе, приведено в таблице 4.3.
Таблица 4.3 - Назначение входов и выходов сервоусилителя MR-J3-10A
Сигнал |
Сокр. обозн. |
Полное обозначение |
Описание |
Сигнальные входы |
RES |
Сброс |
После возникновения аварийной сигнализации этот вход используется для ее сброса. |
LSP |
Концевой выключатель вращения по часовой стрелке |
Для запуска серводвигателя в обоих направлениях вращения оба этих входа должны быть включены. Если один из входов выключился в результате достижения концевого выключателя, вращение возможно лишь в противоположном направлении (по отношению к сработавшему концевому выключателю). |
|
LSN |
Концевой выключатель вращения против часовой стрелки |
Продолжение таблицы 4.3.
|
SON |
Сервоусилитель ВКЛ. |
В результате включения сигнала SON ("Servo ON") активируется силовой контур сервоусилителя. Это означает, что сервоусилитель готов к работе. |
|
ST1 |
Запуск двигателя по часовой стрелке |
Если на клемме ST1 имеется сигнал, двигатель вращается по часовой стрелке. |
Если одновременно включены сигналы ST1 и ST1, двигатель останавливается |
|
ST2 |
Запуск двигателя против часовой стрелки |
Если на клемме ST2 имеется сигнал, двигатель вращается против часовой стрелки. |
||
Сигнальные выходы |
ALM |
Аварийная сигнализация |
Сигнал ALM отключается при отключении электропитания или срабатывании защитного контура, отключающего силовой контур. |
|
RD |
Готовность |
Если сигнал RD включен, сервоусилитель находится в состоянии готовности к работе. |
||
INP |
В позиции |
Этот сигнал включается, если ошибка рассогласования находится в пределах заданного диапазона. Сигнал включается также при включении сигнала SON ("Серво ВКЛ."). |
||
SA |
Достижение частоты вращения |
Сигнал SA включается при почти полном достижении частоты вращения. Если установленная частота вращения < 50об/мин., то сигнал остается включенным. |
||
ZSP |
Нулевая частота вращения |
Сигнал ZSP включается, если серводвигатель достиг нулевой частоты вращения. |
||
Схема включения MR-J3-10B
На рисунке 4.9 представлена схема подключения сервоусилителя MR-J3-10A к контроллеру FX3U.
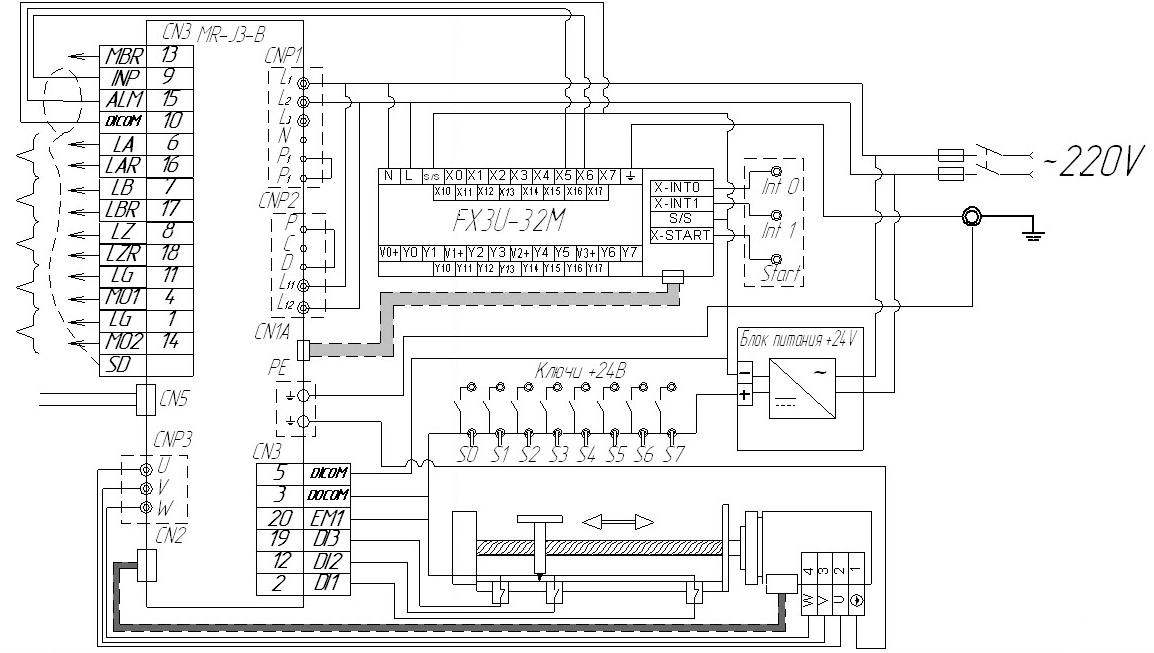
Рисунок 4.9 – Схема включения MR-J3-10B
Назначение входов-выходов сервоуселителя, используемых в лабораторной работе, приведено в таблице 4.4.
Таблица 4.4 - Назначение входов и выходов сервоусилителя MR-J3-10B
Сигнал |
Сокр. обозн. |
Полное обозначение |
Описание |
Сигнальные входы |
DI1 |
- |
За этими сигналами закреплены следующие выключатели: DI1: правый концевой выключатель(FLS) DI2: бесконтактный выключатель(DOG) DI3: левый концевой выключатель(RLS) |
DI2 |
|||
DI3 |
|||
EM1 |
Внешнее аварийное выключение |
В результате отключения входа EM1 серводвигатель останавливается. Серводвигатель выключается и активируется динамическое торможение. В результате включения входа EMG состояние аварийного выключения сбрасывается. |
|
Сигнальные выходы |
ALM |
Аварийная сигнализа-ция |
Сигнал ALM отключается при отключении электропитания или срабатывании защитного контура, отключающего силовой контур. |