

Последовательность действий по настройке пч с векторным управлением (с датчиком)
Выбрать режим векторного управления в параметре 800 (значение 0) (см стр.6-22 инструкции о эксплуатации ПЧ) .
Запустить двигатель на частоте 10 Гц. При фиксированной нагрузке уменьшать частоту с произвольным шагом. Найти частоту вращения (нижний предел регулирования), при которой произойдёт полная остановка вала двигателя (не давайте двигателю находиться в остановленном состоянии более 5 сек.).
Остановить двигатель, нажав кнопку STOP/RESET на панели управления.
Проанализировать полученные данные и сделать выводы о преимуществах и недостатках различных видов управления.
Лабораторная работа №4 Изучение и исследование сервоприводов
4.1 Цель работы
1. Изучить основы теории и принцип действия сервопривода.
2. Получить практические навыки по настройке и работе с сервоприводами MR-J3-10A/B.
4.2 Основные сведения
Слово “серво” произошло от латинского слова servus, что переводится как слуга, раб, помощник. В машиностроительных отраслях сервоприводы использовались при решении второстепенных задач. Однако сегодня ситуация изменилась.
Сервоприводы широко используются в системах, где не требуется высокая динамика. Возможность получения точного управления, широкого диапазона регулирования скорости, высокой помехоустойчивости и малых габаритов часто являются решающим фактором их применения. Сервоприводы являются высокотехнологичной ступенью электропривода.
Применение сервоприводов необходимо в оборудовании, где главным критерием является производительность. Сервоприводами оснащаются прецизионные системы поддержания скорости и позиционирования промышленных роботов и высокоточных станков. Сервоприводы устанавливаются на координатно-сверлильных станках, различных технологических транспортных системах, вспомогательных механизмах и в приводах подач современных станков с ЧПУ, обеспечивающих перемещения рабочих органов станка.
Сервопривод – это следящий привод, разработанный для автоматического управления параметрами объекта (позиция, направление, скорость и т.п.). Сигнал, соответствующий величине (позиция, скорость, и т.п.), поступает в сервоусилитель, который определяет текущее значение величины, сравнивает его с заданным и последовательно выполняет действия, направленные на уменьшение рассогласования.
На рисунке 4.1 приведена типовая структурная схема сервопривода, который состоит из сервоусилителя, серводвигателя, энкодера.
Чтобы получить высокое быстродействие системы, необходимо иметь как можно меньшие момент инерции ротора двигателя и электромеханическую постоянную времени двигателя.
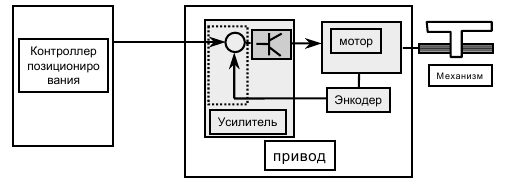
Рисунок 4.1 – Типовая структурная схема сервопривода
Функциональная схема
На рисунке 4.2 приведена упрощенная функциональная схема сервопривода.
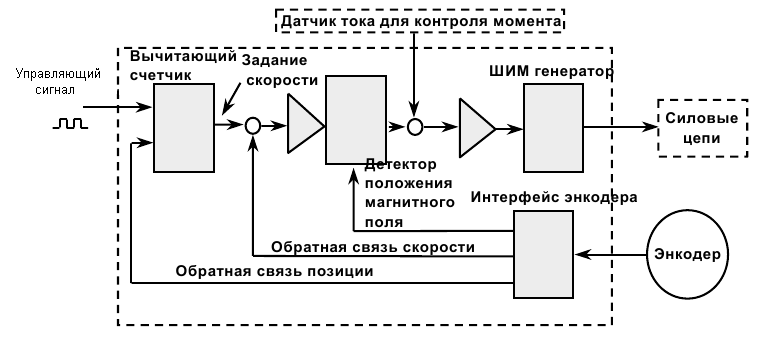
Рисунок 4.2 –Функциональная схема сервопривода
От программного логического контроллера (ПЛК) путем включения ключа на лицевой панели стенда управляющий сигнал поступает на вычитающий счетчик. Из заданного сигнала вычитается сигнал датчика ОС по положению (энкодера). Сигнал рассогласования возвращается в контроллер, изменение числа входных импульсов из которого вызывает изменение скорости до тех пор, пока рассогласование не станет равным нулю, т.е. пока заданный сигнал не станет равным сигналу с датчика ОС. Затем управляющий сигнал задания скорости подается на сумматор, где в свою очередь сравнивается с сигналом с энкодера, поданным через обратную связь по скорости. Таким образом, сравнивается частота поданных и пришедших импульсов. Чем больше частота входных импульсов, тем больше скорость вращения. Далее сигнал, прошедший через усилитель, поступает на детектор положения магнитного поля, определяющий положение ротора и задающий угол магнитного поля (момент же задается по углу поворота и току ротора).
Сигналы с датчика тока для контроля тока и детектора положения магнитного поля поступают на сумматор. Сигнал рассогласования возвращается в контроллер, который сводит рассогласование к нулю таким же образом, как описывалось выше. Рассогласование через усилитель поступает на ШИМ генератор, преобразующий постоянный ток в переменный и подающий аналоговый сигнал в силовые цепи.
Обратные связи в сервоприводе выполняют следующие задачи:
- детектирование позиции ротора двигателя;
- детектирование скорости вращения ротора двигателя;
- детектирование положения магнитного поля ротора.
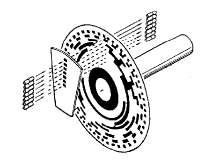
Рисунок 4.3 – Конструкция абсолютного энкодера
В лабораторной работе для определения позиции ротора используется абсолютный энкодер, который изображен на рисунке 4.3. Решающим фактором использования этого типа энкодера в данной системе стала его возможность продолжать работу с последней позиции.
Абсолютный энкодер формирует сигнал, когда вал вращается или находится в состоянии покоя. Внутренняя сторона диска этого типа энкодера имеет несколько концентрических дорожек. Каждой дорожкой формируется уникальный двоичный код для конкретной позиции вала. Этот тип энкодеров не изменяет своего значения при отключении питания и не требует возвращения в начальную позицию. Энкодер устойчив к вибрациям. Обычно используют один из двух видов комбинаций сигналов: код Грея или бинарный код.