

Л1
п\
(7.10)
Ап
+
—-![]()
Это - известная В-формула Эрланга (1917, [11]). Она обозначается £ (А) = Ех п (А), где указатель «1» рассматривается как указатель названия первая формула Эрланга.
Потери по вызовам
v=0![]()
(7.11)
Обслуженная нагрузка
Если мы используем усеченное уравнение между состоянием [г-1], и [/'], то получим:
п п
(7.12)
= А-{1-Е„(А)},
где А — предложенная нагрузка. Обслуженная нагрузка будет меньше и чем А, и чем п.
Потери по нагрузке
Ае = А - Y= А • Еп(А).
А — Y С = —— = Еп(А).
Мы, таким образом, имеем Е=В=С, потому что интенсивность вызова не зависит от состояния. Это свойство — PASTA (Poisson Arrivals See Time Averages — Пуассоновское поступление вызовов, наблюдаемое за среднее время) — справедливо для всех систем с Пуассоновскими потоками вызовов. Во всех других вариантах, по крайней мере, два из трех случа-
ев потерь различны. В-формула Эрланга показана графически на рис. 7.3 для некоторых выбранных значений параметров.
Нагрузка, которую обслуживает I-ый канал (использование а..)
Вероятность блокировки Еп(а)
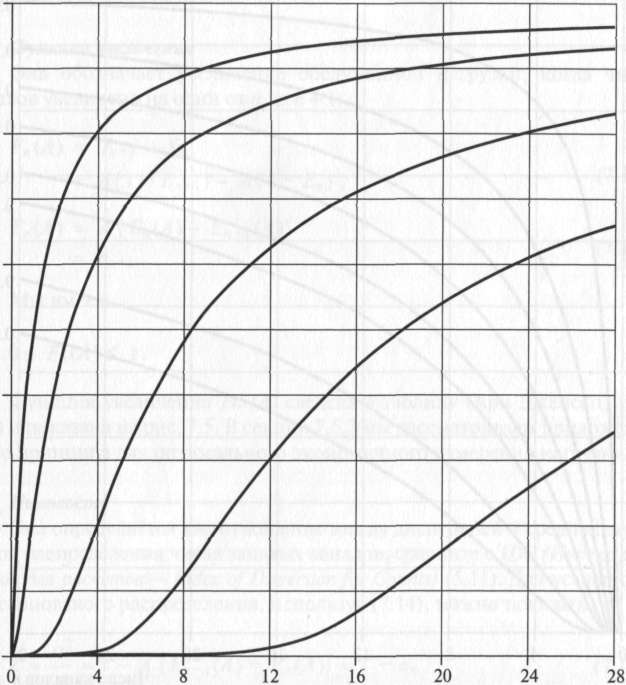
Предложенная нагрузка л
Рисунок 7.3. Вероятность блокировки Еп(А) как функция предложенной нагрузки для различных значений числа каналов — п (7.9)
1.0
Случайный поиск. В этом случае все каналы в среднем обслуживают одну и ту же нагрузку. Полная обслуженная нагрузка не зависит от стратегии поиска, и мы можем найти использование:
Эта функция показана на рис. 7.4, и мы наблюдаем, что в данном случае при потерях Е получается самое высокое использование для больших групп канала (экономия из-за масштаба).
Использование
а Е
Число
каналов п
Рисунок
7.4. Среднее
удельное использование а
(7.13) как функция числа каналов п для
заданных значений потерь Е
Обусловленный поиск — последовательный поиск: нагрузка, которую обслуживает канал, есть разность между нагрузкой, потерянной /-1 каналами, и нагрузкой, потерянной / каналами:
(7.14)
Отметим, что нагрузка, которую обслуживает канал /, не зависит от общего числа каналов. Таким образом, каналы после /-го канала не влияют на нагрузку, обслуживаемую каналом /, т.е. между каналами нет никакой обратной связи.
Функция увеличения
Она обозначает увеличение обслуженной нагрузки, когда число каналов увеличено на один от п до п + 1:
(7.15)
= A{\-En+X}- A{\-En),
(7.16)
*- &П+1 •
Мы имеем
0< F„G4)< 1.
Функция увеличения Fn (А) сведена в таблицу (Арн Дженсен, 1950 [50]) и показана на рис. 7.5. В секции 7.6.2 мы рассматриваем приложение этого принципа для оптимального экономичного измерения нагрузки.
Пиковость
Она определяется как отношение между дисперсией и средней величиной распределения числа занятых каналов, сравните с IDC (Индекс рассеяния для расчетов — Index of Dispersion for Counts) (5.11). Для усеченного Пуассоновского распределения, используя (7.14), можно показать
![]()
(7.17)
Размерность [число каналов]
В группе с обусловленным поиском мы можем таким образом оценить пиковость нагрузки, которую обслуживает последний канал.
Число
каналов п
Рисунок
7.5. Функция
увеличения Fn
(А)
(7.16)
по
В
формуле
Эрланга. Fn{A)
при последовательном поиске равна
нагрузке ая+1,
при увеличении числа канала (п+
1)
Продолжительность состояния [i]
Полная интенсивность для перехода из состояния [г] постоянна и равна (к + г'р), и поэтому продолжительность времени в состоянии [г] (время пребывания) экспоненциально распределена с функцией плотности:
/ДО = (Я + г>) • е- ‘, Q<i<n,
-г и <7Л8>
fn(t) = (rtfi)'Q (п>4)‘ , i= п.
Общая процедура для диаграмм перехода состояний
Самый важный инструмент в теории телетрафика — формулировка и решение задач с помощью моделей, посредством применения диаграмм перехода состояния. Из предыдущих секций мы можем установить следующую стандартную процедуру для того, чтобы применить диаграмму перехода состояния. Она состоит из множества шагов и может быть сформулирована в общих терминах. Эта процедура также применима для многомерных диаграмм перехода состояния, которые мы рассмотрим позже. Процедура всегда проходит следующие шаги.
а. Созданием диаграммы перехода состояния:
определяют состояния системы,
рисуют состояния как окружности,
рассматривают состояния по одному и вводят в рисунок все возможные стрелки переходов от одного состояния к другому. При этом учитывают следующие процессы:
процесс поступления вызовов (вновь прибывшая заявка или сдвиг фаз в процессе поступления вызовов),
процесс окончания (время окончания обслуживания или сдвиг фазы).
Этим способом мы получаем законченную диаграмму перехода состояния.
б. Составить уравнения, описывающие систему.
Если условия для статистического равновесия выполнены, уравнения устойчивости состояний могут быть получены из:
уравнений узла,
уравнения сечения.
в. Решить уравнения равновесия, отображающие статистическое равновесие.
выражают все вероятности состояния, например, с помощью вероятности нулевого состояния [0] —р (0),
нормализацией находят р (0).
г. Вычислить критерии качества работы, выраженные вероятностями состояния.
На практике мы находим ненормализованное значение вероятности состояния #(0), равное единице, а затем вычисляем относительную величину q(i), (/' = 1, 2....). Нормализуя ее, находим:
где
(7.20)
v=0
Тогда потери по времени получаются равными:
![]()
(7.21)