

Прерывистый Пуассоновский процесс
В секции 6.4 мы рассматривали прерывистый Пуассоновский процесс Качуры (IPP) (Kuczura, 1977 [71]), который характеризуется тремя параметрами и широко используется для моделирования нагрузки перегрузки. Возьмем полнодоступную группу с п обслуживающими приборами, на которые поступают вызовы, прибывающие согласно IPP (см. рис. 6.7) с экспоненциально распределенными временами обслуживания.
Тогда мы можем создать диаграмму переходов состояний, как показано на рис. 9.6. Диаграмма двухмерная. Состояние (i, j) обозначает, что есть i обслуживаемых вызовов (/' = 0,1,..., п), а процесс поступления вызовов находится в фазе /'(/' = а, если идет процесс поступления вызовов, и j = b, если процесс возвращает вызов). Используя уравнения равновесия узлов, находим вероятности состояния равновесия p(i,j).
Потери по времени Е равны:
Потери по вызовам В равны:
![]()
(9.21)
Потери по нагрузке С определяются как соотношение предложенной нагрузки и потерянной нагрузки.
Предложенная нагрузка равна:
р(оп) X со Л,
p(on) + p(off) ц со+у ц'
Обслуженная нагрузка:
(9.22)
Из этого уравнения мы получаем С = (A - Y)/A. Фактически, потери по нагрузке будут равны потерям по вызовам, так как процесс поступления вызовов является процессом рождения. Но это трудно вывести из полученных выше результатов. Как показано в секции 6.4.1, интервалы поступления распределены по гиперэкспоненте Н2.
Рисунок
9.6. Диаграмма переходов состояний для
полнодоступной системы с потерями
с п
обслуживающими приборами, IPP-
процессом
поступления вызовов (см. рис. 6.7) и
экспоненциально распределенным временем
обслуживания (|д)
Процесс поступления вызовов Кокс-2
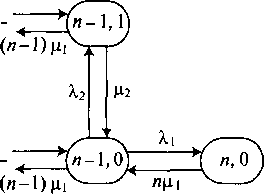
В секции 6.4 мы отмечали, что процесс поступления вызовов Кокс-2 дает более общее представление процесса, чем IPP (Kuczura, 1977 [71]). Если мы рассматриваем процесс поступления вызовов Кокс-2, как показано на рис. 4.10, то получаем диаграмму переходов состояний на рис. 9.7. Из неё мы находим, согласно предположению о статистическом равновесии вероятности состояния, следующие критерии качества работы: Потери по времени Е:
Е = р(па) + p(nb). (9.23)
Потери по вызовам В:
в = Ph ‘р(па)+ Х2 •р{пЪ) ^ 24^
Ph ' Y^Piia) + Я.2 • ^РФ)
i=0 1=0
Потери по нагрузке С. Предложенная нагрузка - это среднее число среднего времени обслуживания, деленная на число попыток вызова. Средний интервал поступления:
, „ ,1 X2 + (l -p)h та= т-+0 ~ Р)'т~ = •
Aj Л*2 А-2
Предложенная нагрузка тогда равна А = (та • ц)-1. Обслуженная нагрузка определяется по (9.22) с помощью рис. 9.7, и таким образом мы находим потери по нагрузке С.
Если мы обобщим процесс поступления вызовов на процесс поступления вызовов Кокс-k, то диаграмма перехода состояний будет все еще двухмерной. При использовании распределения Кокса мы можем в принципе рассматривать любое число параметров.
Если мы обобщаем время обслуживания с использованием распределения Кокса- к, то диаграмма переходов состояний для п > 1 становится намного более сложной, потому что существует процесс обслуживания для каждого обслуживающего прибора, но только один процесс поступления вызовов. Поэтому мы всегда обобщаем процесс поступления вызовов и принимаем экспоненциально распределенные времена обслуживания.
Л. А, К А.
Рисунок
9.7. Диаграмма переходов состояний для
полнодоступной системы с потерями с п
обслуживающими приборами, процесс
поступления вызовов — Кокс-2
(см. рис. 4.10), и экспоненциально
распределенным временем обслуживания
(ц)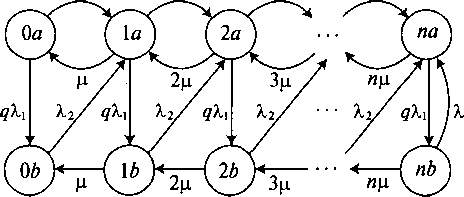
Краткие итоги
В этой лекции рассматривались системы с ограниченной доступностью (неполнодоступные), то есть системы, где абонент или поток нагрузки имеют доступ только к к заданным каналам из общего количества п(к < п).
В неполнодоступной системе, если все к каналы заняты, попытка вызова блокируется, даже если среди оставшихся (п—к) каналов есть свободные каналы.
В сетях связи с альтернативной маршрутизацией нагрузка, которая потеряна первичной группой, предлагается группе перегрузки, и она имеет свойства, отличающие её от РСГ-нагрузки.
В системе Костена группа разбита на ограниченную первичную группу с я каналами и группой перегрузки с бесконечной емкостью, предлагаемая нагрузка — РСТ 1.
Объединенный процесс перегрузки g потоков нагрузки называют эквивалентной нагрузкой перегрузки от единственной полнодоступной группы с тем же самым математическим ожиданием и дисперсией нагрузки перегрузки.
При применении метода ERTмы должны вычислить (т, v) для данных значений (А, п) и наоборот. Это требует применение итерационной процедуры.
Мы можем разбить полную потерянную нагрузку на отдельные пакеты потерянной нагрузки, принимая во внимание, что нагрузка, потерянная для потока /, пропорциональна т. — средней величине и пиковости потока Z. = v/m. (Нагрузка) вероятность блокировки для нагрузки потока / называется вероятностью блокировки пакета.
Фредерикс (1980 [29]) предложил метод эквивалентности. Для пиковости Z* 1 метод Фредерикса и Хэйварда предполагает, что система имеет такую же вероятность блокировки, как система из n/Zканалов с предложенной нагрузкой А/Z, и таким образом пиковость Z= 1. Для последней системы мы можем применить В-формулу Эрланга, при этом следует учитывать, что В-формула Эрланга работает для непрерывного числа каналов.
Башарин и Куренков расширили метод, включив мультислотовую (мультискоростную) нагрузку, где вызов требует d каналов от своего начала и до завершения. Если вызов использует d каналов вместо одного (изменение масштаба), то средняя величина времени становится в d раз больше и дисперсия времени - больше в d2 раз.
Если нам необходима большая пропускная способность сети, чем предоставляет одиночный канал, то можно параллельно комбинировать больше каналов. В первоначальном источнике мы можем распределить нагрузку (пакеты или ячейки в ATM) циклическим способом по отдельным каналам и в пункте назначения - восстановить первоначальную информацию.
ВРР-модели нагрузки описывают нагрузку двумя параметрами: средней величиной и пиковостью.
Метод Сандера преобразовывает не-Пуассоновскую нагрузку (среднее значение, дисперсия = т; v) в нагрузку потока с пиковостью Z, прибавляя постоянный поток (нулевая дисперсия) нагрузки со средним значением v-m так, чтобы полная нагрузка имела среднее значение, равное дисперсии v.
Если мы рассматриваем полнодоступную группу с п обслуживающими приборами, на которые поступают вызовы, прибывающие согласно IPP с экспоненциально распределенными временами обслуживания, то можем создать диаграмму переходов состояний. Состояние (/, j) обозначает, что есть i обслуживаемых вызовов (/' = 0,1,..., и), а процесс поступления вызовов находится в фазе j (J = а, если идет процесс поступления вызовов, и j = Ь, если процесс возвращает вызов). Используя уравнения равновесия узлов, мы находим вероятности состояния равновесия р (i,j).
Лекция 10. Многомерные системы с потерями
В этой лекции мы обобщаем классическую теорию телетрафика на решение задач в мультисервисных системах (например, цифровые сети интегрального обслуживания ISDN а В ISDN). Каждый класс услуг соответствует потоку нагрузки. Несколько потоков нагрузки предлагаются одной и той же группе пучков каналов.
В секции 10.1 мы рассматриваем классическую многомерную В-формулу потерь Эрланга. Это пример обратимого марковского процесса, который мы рассмотрим более детально в секции 10.2. В секции 10.3 мы проанализируем большее количество общих систем с потерями и стратегий, включая сервисную защипу (максимальное распределение каналов между сервисами) и мультислотовую нагрузку (ВРР). Все модели имеют так называемую мультипликативную форму (форму произведения - product form), и их числовая оценка очень упрощается при использовании алгоритма свертки для систем с потерями, реализованных специальной программой (секция 10.4). В секции 10.5 будут приведены другие алгоритмы для решения этой проблемы.
Все модели, которые мы рассматриваем, основаны на гибком распределении каналов/слотов. Они могут быть обобщены на произвольные сети коммутации каналов с прямой маршрутизацией, где мы вычисляем вероятности блокировки из конца в конец (лекция 11). Все модели нечувствительны к распределению времени обслуживания, и таким образом они устойчивы для приложений. В конце лекции поговорим о других алгоритмах.
10.1 Многомерная В-формула Эрланга
Мы рассматриваем группу п пучков каналов (каналы, слоты), которым предлагают два независимых PCT-I потока нагрузки: (Хг )i() и (К2, щ). Предлагаемая нагрузка А] - А., соответственно А7 = \ /ц .
Обозначим состояние системы(/,у), где i - число вызовов от потока 1, a у — число вызовов от потока 2. Выполняются следующие ограничения:
О < г < п,
О < j < п, (10.1)
0 < / + у < п.
Диаграмма переходов состояний показана на рис. 10.1. Согласно предположению о статистическом равновесии, вероятности состояний могут быть получены решением глобальных уравнений равновесия для каждого узла (уравнения узла), всего (« + !)(« + 2)/2 уравнения.

Рисунок
10.1. Двухмерная диаграмма переходов
состояний для системы с потерями с
п
каналами, которым предлагают два РСТ-
/ потока нагрузки. Это эквивалентно
диаграмме переходов состояний для
системы с потерями М/Н2/п,
где гиперэкспоненциальное распределение
Н1
дается в (10.7)
 Как
мы увидим в следующей секции, эта
диаграмма соответствует обратимому
марковскому процессу, который имеет
локальное
равновесие и,
кроме того, решение имеет форму
произведения (product
form).
Мы
можем легко показать, что глобальные
уравнения равновесия удовлетворяют
следующим вероятностям состояния,
которые могут быть записаны в форме
произведения:
Как
мы увидим в следующей секции, эта
диаграмма соответствует обратимому
марковскому процессу, который имеет
локальное
равновесие и,
кроме того, решение имеет форму
произведения (product
form).
Мы
можем легко показать, что глобальные
уравнения равновесия удовлетворяют
следующим вероятностям состояния,
которые могут быть записаны в форме
произведения: