

2.5. Электромагнитные первичные преобразователи
Электромагнитные первичные преобразователи предназначены для преобразования перемещения в электрический сигнал за счет изменения параметров электромагнитной цепи. Возможно изменение магнитного сопротивления магнитной цепи датчика за счет перемещения сердечника или изменения воздушного зазора в магнитной цепи. В том и другом случае меняются индуктивность и реактивное сопротивление индуктивного датчика или взаимоиндуктивность и напряжение в выходной обмотке трансформаторного датчика.
Индуктивный преобразователь имеет одну катушку переменной индуктивности L. При приложении к преобразователю переменного напряжения с амплитудой U и частотой ω в нем возникнет ток с амплитудой
![]() U/Z
U/Z
где Z = ωL — реактивное сопротивление катушки.
Изменение индуктивности катушки L в результате перемещения или поворота элементов магнитопровода при перемещении щупа датчика при постоянном напряжении питания приводит к изменению тока в измерительной цепи, которое и контролируется. Так как выходной величиной индуктивных датчиков является непрерывно меняющаяся величина реактивного сопротивления, эти датчики обычно относятся к параметрическим аналоговым.
На рис. 10, а изображен преобразователь с переменным воздушным зазором d. Рабочее перемещение подвижного сердечника составляет 0,01... 10 мм. На рис. 10, б показан преобразователь с переменной площадью воздушного зазора. Рабочее перемещение в этом случае составляет 5...20 мм.
На рис. 10, в изображен преобразователь с разомкнутой магнитной цепью — катушка с перемещающимся сердечником.
Рис. 10. Схемы
индуктивных датчиков перемещений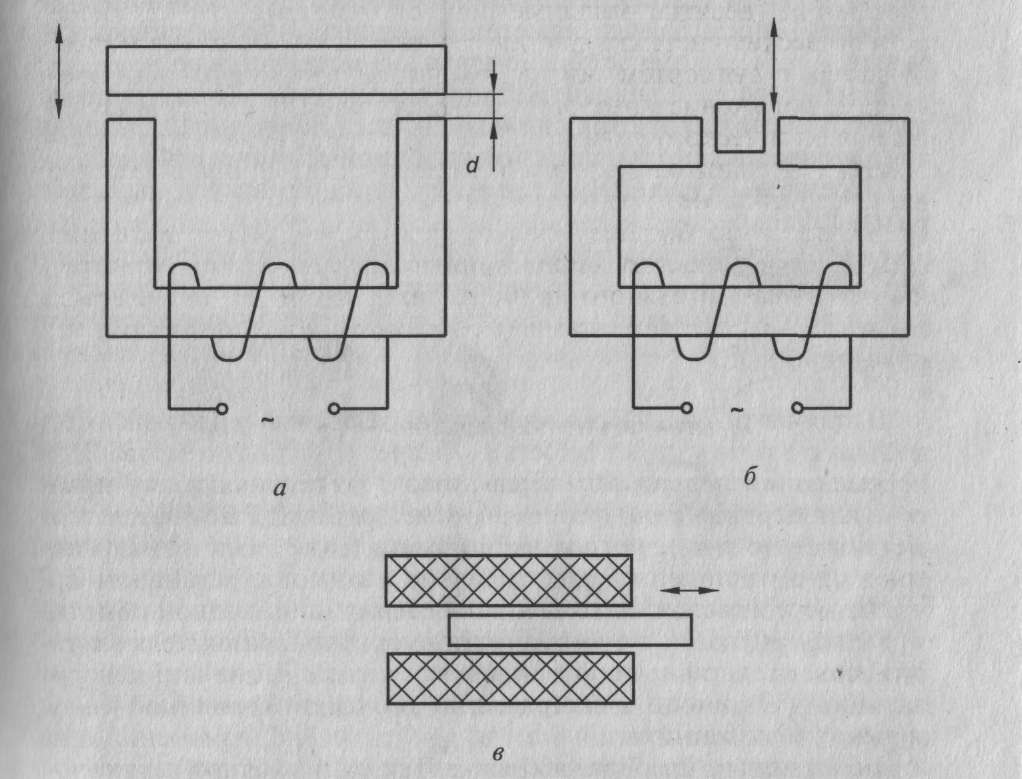
Рис. 11.
Трансформаторный
датчик перемещений:
1 — неподвижный сердечник;
2
—
ферромагнитная вставка;
3 — подвижный
сердечник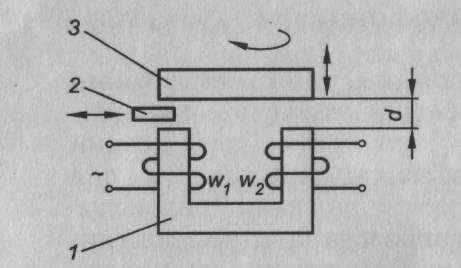
Трансформаторные (взаимоиндуктивные) первичные преобразователи действуют по принципу трансформатора. На рис. 3.11 изображена схема трансформаторного преобразователя, в который входят две катушки w1 и w2 и магнитопровод, состоящий из П-образного неподвижного сердечника 7, подвижного сердечника 3 и воздушного зазора шириной d между ними. К первичной обмотке w1 приложено переменное напряжение е1 возбуждающее в ней переменный ток I1 который в свою очередь вызывает в ней переменный магнитный поток
![]() ,
,
где w1 — число витков во входной обмотке; L12 — взаимоиндуктивность, определяемая геометрией катушек, числом витков катушек w1 и w2, геометрией и материалом магнитопровода.
Магнитное поле концентрируется в замкнутом магнитопроводе так, что магнитный поток одинаков во всех поперечных сечениях магнитопровода, в том числе и в выходной обмотке w2 Ф2 ≈Ф.
Переменный магнитный поток Ф2 через обмотку w2 вызывает в ней ЭДС
![]()
и ток ![]() /
/![]()
В отличие от трансформатора в преобразователе сердечник имеет меньшую взаимоиндуктивность Ь12 за счет воздушного зазора. При перемещении подвижного сердечника 3 по вертикали, его повороте или перемещении ферромагнитной вставки 2 меняются: геометрия сердечника, магнитное сопротивление и магнитный поток в магнитной цепи и, как следствие, взаимоиндуктивность Ьп, что ведет к изменению тока и напряжения на выходной обмотке w2. Таким образом, в трансформаторных преобразователях естественной входной величиной является перемещение или поворот элементов сердечника, естественной выходной величиной — изменение взаимоиндуктивности и, как следствие, изменения тока и напряжения на выходной обмотке. Так как выходной величиной этих датчиков является непрерывно меняющаяся величина выходного напряжения и тока, они обычно относятся к генераторным аналоговым датчикам.
Возможно построение индуктивного или трансформаторного датчика силы на основе эффекта изменения магнитной проницаемости материала сердечника в результате упругих деформаций растяжения, сжатия, кручения под действием приложенных сил (так называемого магнитоупругого преобразователя). В этом случае естественными входной и выходной величинами чувствительного элемента являются упругая деформация сердечника и взаимоиндуктивность. Датчики этого типа являются дискретными, инкрементными, параметрическими.
Электромагнитные датчики имеют линейную характеристику с зонами насыщения. Погрешность преобразователей с переменным воздушным зазором составляет 1... 1,5 %, погрешность маг- нитоупругих преобразователей достигает 4 %. Как правило, питание измерительной цепи индуктивных и трансформаторных преобразователей осуществляется от сети переменного тока частотой 50 Гц, напряжение питания не превышает 300 В, диаметр провода обмоток составляет не менее 0,07 мм.
Одним из основных достоинств электромагнитных преобразователей является возможность получения мощного выходного сигнала (1... 5 Вт), что снижает чувствительность измерительного прибора к электромагнитным помехам и позволяет использовать на выходе измерительной цепи малочувствительный указатель, например самописец. Лишь для малогабаритных преобразователей необходимо включать усилитель между измерительной цепью и указателем.
Существенным преимуществом индуктивных и трансформаторных датчиков является высокая надежность и практически неограниченный срок службы благодаря отсутствию механического контакта подвижных частей чувствительного элемента. Для уменьшения погрешности датчика и обеспечения линейности его характеристики часто используют дифференциальный преобразователь, состоящий из двух катушек и перемещающегося магнитного сердечника (рис. 12, а, б). Изменение индуктивностей катушек (активных плеч неравновесного моста) при перемещении щупа происходит в противоположных направлениях.
Для точного измерения больших перемещений (например, перемещения суппорта токарного станка) применяют линейные и круговые индуктивные преобразователи с зубчатыми сердечниками (рис. 12, в). При совмещении выступов подвижного и неподвижного сердечников индуктивность максимальна, при совмещении выступов впадинами — минимальна.
При перемещении подвижного сердечника реактивное сопротивление чувствительного элемента и ток в цепи меняются периодически так, что импульс в цепи соответствует перемещению щупа и сердечника на шаг зубьев.
в
Рис. 12. Измерительные
схемы индуктивных датчиков
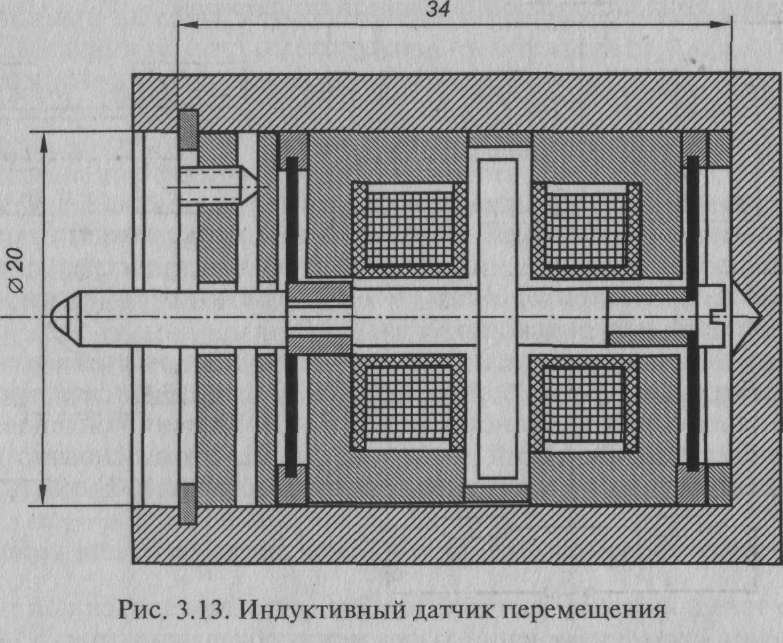
Рис. 13. Измерительные схемы индуктивных датчиков
Дифференциальный преобразователь строится из двух пар зубчатых сердечников так, что при совпадении выступов первой пары во второй паре выступ совпадает с впадиной, и пары сердечников работают в противофазе.
На рис. 13 приведена конструкция дифференциального индуктивного датчика перемещений, применяемого в динамометрах для определения усилия резания. Якорь датчика с диском укреплен на двух упругих мембранах между катушками и цилиндрическими элементами магнитопровода. При перемещении якоря в осевом направлении зазор между диском и одной из катушек растет (индуктивность этого датчика падает), зазор между диском и другой катушкой падает (индуктивность растет). Катушки включены в мостовую схему.
Одинарные индуктивные датчики применяют в качестве бесконтактных датчиков положения и концевых выключателей. Дифференциальные датчики позволяют замерять перемещения в диапазоне от сотых долей миллиметра до десятков сантиметров и широко применяются в системах управления разного назначения.