

Практическая часть
На рисунке 1 показана структурно-функциональная схема типовой системы автоматического регулирования, включающая обобщенный регулятор технологической переменной и элементы, входящие в состав обобщенного объекта регулирования. Передаточные функции элементов обобщенного объекта регулирования представлены в таблице 1. Численные значения параметров передаточных функций указаны в таблице 2 в соответствии с вариантом задания на курсовую работу, определяемым последней цифрой номера зачетной книжки.

Рисунок 1- Структурно - функциональная схема типовой САР
Таблица №1
ЭЛЕМЕНТ АСР |
ПЕРЕДАТОЧНАЯ ФУНКЦИЯ ЭЛЕМЕНТА |
Регулирующий орган |
WPO(p)=KPO; |
Объект регулирования |
|
Датчик |
|
Промежуточный преобразователь |
|
Таблица 2
Вариант |
Численные значения параметров передаточных функций |
|||||||
|
Кро |
Ко |
τ |
Т1 |
Т2 |
КД |
ТД |
Кпп |
0 |
0,5 |
2 |
1 мин. |
15 мин. |
4 мин. |
1,2 |
30 с. |
0,8 |
Требуется:
Построить в обозначениях Matlab + Simulink структурно-функциональную схему (рис.1).
Определить передаточную функцию обобщенного объекта регулирования Wоо(P) и рассчитать значения ее параметров.
Определить параметры передаточной функции регулятора.
Рассчитать и построить с использованием программы Matlab + Simulink кривую переходной характеристики замкнутой АСР, определить показатели качества переходного процесса: перерегулирование H(t)max и время переходного процесса tnn
4. Подобрать настройки регулятора так, чтобы перерегулирование находилось в пределах H(t)max =5-7% при минимальном времени переходного процесса.
5.Рассчитать и построить ЛАХ и ЛФХ.
6.Провести анализ годографа по показателям устойчивости замкнутой АСР.
7.Пользуясь графическим редактором (по выбору студента) нарисовать структурно-функциональную схему (рис.1), с указанием конкретных значений передаточных функций всех элементов системы.
Для представленной на рис. 1 Структурно - функциональной схемы передаточную функцию обобщенного объекта регулирования можно определить по выражению:
Woo(P) = Wpo(P)*Wo(P)*WД(P)*Wпп(P)
Коэффициент передачи обобщенного объекта регулирования определяется как произведение коэффициентов передачи элементов, входящих в состав обобщенного объекта:
Коо=Кpо*Кo*КД*Кпп
Для определения параметров передаточной функции регулятора можно воспользоваться методиками, изложенными в курсе ТАУ.
В случае, если обобщенный объект содержит несколько постоянных времени, причем одна из его постоянных времени (ее называют большой Ts) больше суммы остальных (малых) постоянных времени и времени запаздывания, можно воспользоваться следующей методикой определения алгоритма регулирования и параметров передаточной функции регулятора. Для такого обобщенного объекта рекомендуется выбирать ПИ -регулятор с передаточной функцией:

где Кр - коэффициент передачи регулятора; Тиз - время изодрома регулятора.
Для компенсации большой постоянной времени рекомендуется выбрать величину Тиз равной большой постоянной времени обобщенного объекта:
Т1=900=Тиз=Тб
Величина Кр в этом случае, определяется по формуле:

где
![]() –
сумма малых постоянных времени и времени
запаздывания обобщённого объекта.
–
сумма малых постоянных времени и времени
запаздывания обобщённого объекта.
σ=τ+Тд+Т2
σ=60+30+240=330с
1,42
Регулирующий орган: WPO(p)= KPO=0,5
Объект регулирования:
==
Датчик:
Wд(р)=
Промежуточный преобразователь: Wпп(р)=Кпп=0,8
Обобщенный регулятор:
Wp(p)==
Согласно полученным расчетам построим структурно - функциональную схему типовой САР в программе Matlab

Рисунок 2 - Структурно - функциональная схема типовой САР
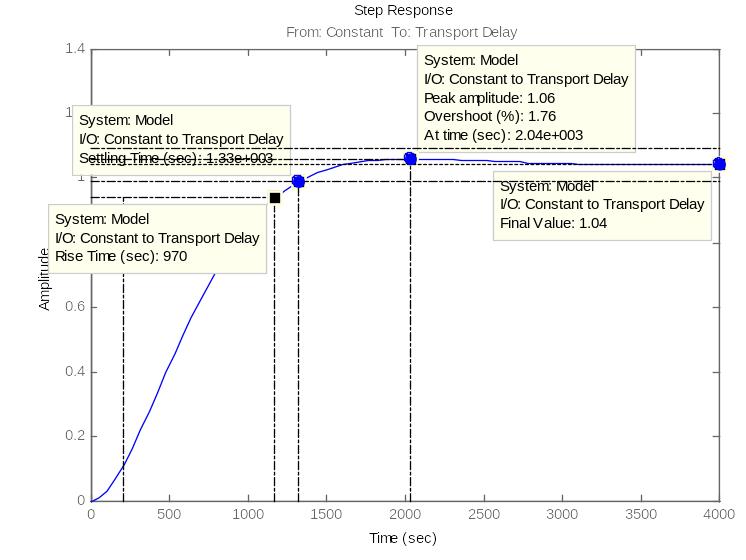
Рисунок 3-Кривая переходной характеристики замкнутой АСР
Настройки регулятора находятся в пределах H(t)max =5-7% при минимальном времени переходного процесса.
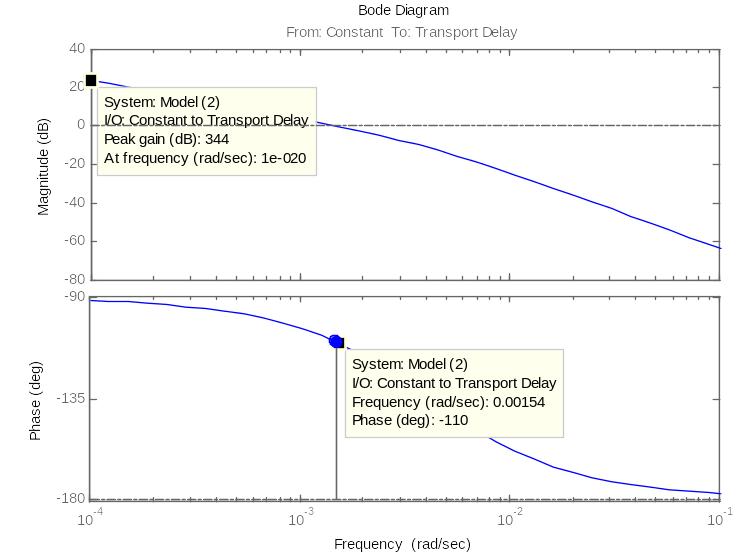
Рисунок 4-График определения запасов устойчивости по ЛЧХ
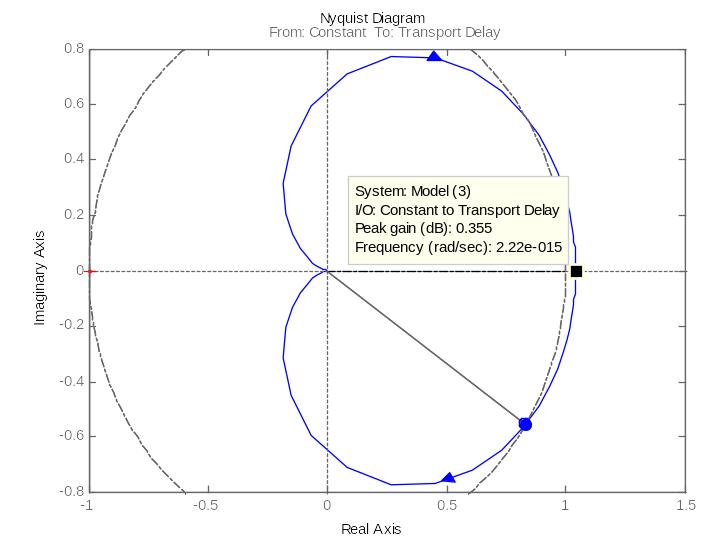
Рисунок 5-График определения запасов устойчивости по АФЧХ (критерий Найквиста)