

20.Устойчивость сау. Частотные критерии устойчивости линейных сау. Критерий Найквиста-Михайлова.
Система
автоматического управления будет
устойчива в том случае, если годограф
передаточной функции не охватывает
точку
 .
В противном случае система не устойчива.
.
В противном случае система не устойчива.
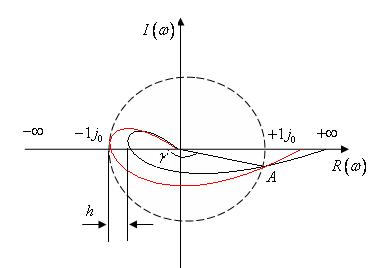

Если
через точку с координатами
провести окружность единичного радиуса
с центром в точке
 ,
то получим точку пересечения годографа
передаточной функции с окружностью
(точка А). Угол
определяет запас устойчивости системы
по фазе входного сигнала (
,
то получим точку пересечения годографа
передаточной функции с окружностью
(точка А). Угол
определяет запас устойчивости системы
по фазе входного сигнала ( и
и
 )
. Запас устойчивости по модулю амплитуды
входного сигнала определяется отрезком
h, который ограничивает
устойчивость системы в целом.
)
. Запас устойчивости по модулю амплитуды
входного сигнала определяется отрезком
h, который ограничивает
устойчивость системы в целом.
Особенности критерия:
Различают характеристики первого и второго рода
а )
характеристика первого рода называется
годограф пересекающий ось абсцисс
справа от точки
)
характеристика первого рода называется
годограф пересекающий ось абсцисс
справа от точки
б) График устойчивой системы второго рода.
График неустойчивой системы.

В случае, если годограф передаточной функции проходит через точку , то система находится на грани устойчивости (консервативная система)
21.Оптимальная сау курсом судна. Основные понятия.
22.Адаптивная сау курсом судна. Основные понятия.
Данные системы характеризуются тем, что управляющий алгоритм автоматически, целенаправленно изменяется для достижения успешного или в каком-либо смысле оптимального управления.

Все адаптивные САУ делятся на 3 вида:
Самонастраивающаяся система – адаптация в данной системе осуществляется путем изменения параметров управляющих воздействий
Самоорганизующаяся система – система, в которой адаптация осуществляется путем изменения не только параметров
 ,
но и структура управляющего устройства.
(т.е. меняется алгоритм обработки
результатов измерений).
,
но и структура управляющего устройства.
(т.е. меняется алгоритм обработки
результатов измерений).Самообучающаяся САУ – это САУ, в которой оптимальный режим работы объекта управления определяется при помощи управляющего устройства, алгоритм которого автоматически целенаправленно совершенствуется в процессе обучения, путем автопоиска. При этом при выборе решения, система автоматически запоминает все предыдущие состояния.
23.Законы распределения погрешностей измерений. Нормальный гауссовский закон. Числовые статистические характеристики погрешностей измерений.
24.Спектральная плотность погрешностей измерений. Общие понятия, связь с алгоритмами обработки радионавигационных измерений.
25.Математические модели погрешностей радионавигационных измерений. Уравнение измерений вероятностного алгоритма обработки результатов измерений.
26.Постановка задачи ОМС. Построение алгоритма обработки результатов избыточных измерений.
27.Примеры построения алгоритмов обработки результатов измерений для случаев: а) двумерного вектора состояния, б)двумерного вектора состояния с использованием матричных функций, в) алгоритма Холецкого для случая избыточных измерений.
28.Методы обработки радионавигационных измерений. Критерии эффективности. Метод компенсации погрешностей радионавигационных измерений (фильтр Калмана).
Для снижения влияния погрешности измерений в измерительное устройство вводят математические модели динамики судна и математические модели случайных погрешностей измерений. Для большинства приложений в технике приходится иметь дело со стационарными случайными процессами. Закон распределения составляющих этих процессов может считаться нормальным, - спектральная плотность погрешности достаточно хорошо апроксимируется дробно-рациональной функцией.

Характер погрешности измеренного параметра по различным системам различен. Повысить точность и надёжность ОМС можно за счёт совместного использования нескольких измерительных систем:
- автономная навигационная система
- спутниковая сетевая РНС
 - автономная система
- автономная система
 - СРНС
- СРНС
Погрешности СРНС имеют хорошую долговременную стабильность параметра на воздействие широкополосных помех.
Погрешности АНС обладают хорошей кратковременной стабильностью.
В связи с тем, что различные навигационные системы имеют различные частотные характеристики погрешностей то имеется возможность их разделения и выделения, т.е. фильтрация.
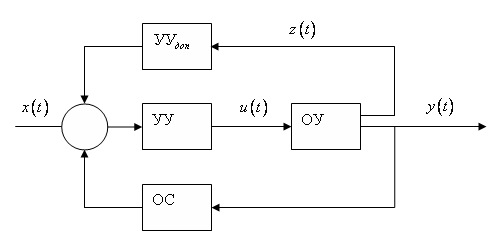
Рассмотрим в качестве примера схему компенсаций погрешностей измерений с помощью фильтра Калмана :

На выходе
фильтра в результате фильтрации получаем
 - не верно
- не верно
 !!!
!!!
В результате использования фильтра Калмана, результирующая погрешность алгоритма компенсации определяется только погрешностью работы фильтра Калмана.
Для повышения точности работы алгоритма компенсации, необходимо повышать точность математической модели погрешности измерений.
Особенности решения навигационной задачи с использованием вероятностных алгоритмов обработки результатов измерений.
Основное содержание заключается в определении координат и скоростей объекта являющихся основой их вектора состояния.
 - географическая
система координат низкоскоростных
объектов.
- географическая
система координат низкоскоростных
объектов.
 -
для высокоскоростных объектов
-
для высокоскоростных объектов
Для нахождения данных величин, используют алгоритмы, которые отличаются ходом вычислительного процесса. На практике используются итерационные алгоритмы. В основу метода статистического оценивания могут быть положены следующие критерии качества оптимизации:
минимум дисперсии ошибок оценки вектора состояния
минимум суммы модуля невязок
максимум функций правдоподобия
максимум плотности апостериорной вероятности
Уравнение измерений в вероятностном алгоритме может быть представлено в виде разностных матрично-векторных уравнений
 , где
, где
Х – вектор состояния
Ф – фундаментальная матрица (математическая модель движения объекта)
Г - матрица коэффициентов погрешностей измерений
Н – матрица коэффициентов проекций градиентов навигационных параметров
 - вектор шумов
измерений
- вектор шумов
измерений
W – вектор шумов системы (воздействие окружающей среды)
Z – вектор значений измерений
Первое уравнение системы описывает динамику движения объекта. Второе уравнение системы описывает динамику погрешностей измерений.
Окончательно, алгоритм фильтрации методом Калмана имеет вид:
 ,
где
,
где
 -
коэффициент усиления фильтра
-
коэффициент усиления фильтра
 - ковариационная
матрица погрешностей оценки навигационного
сеанса
- ковариационная
матрица погрешностей оценки навигационного
сеанса
Собственное значение матрицы Р определяют полуоси эллипса погрешностей. А собственные вектора матрицы определяют направление этих полуосей. Таким образом с использованием фильтра Калмана имеется возможность на каждый конкретный момент времени определять эллипс погрешности навигационного сеанса. Имеется возможность автоматически подстраивать работу фильтра через его коэффициент усиления к текущим условиям плавания. Это дает возможность создания автоматических адоптивных систем управлением движения судна.
29.Структурная схема управляющей микро-ЭВМ. Назначение основных блоков. Виды интерфейса управляющей микро-ЭВМ. Электрический и логический протоколы передачи данных.
30.Внешние устройства бортовой ЭВМ. Назначение, основные характеристики, особенности использования.
31.Виды информации, представление информации внутри встраиваемой микро-ЭВМ (GPS, ARPA, AIS, ECDIS). Системы счисления.
32.Операционная система встраиваемой микро-ЭВМ. Назначение, состав, особенности использования.
33.Международные морские базы данных. Назначение, особенности использования. Современные морские телекоммуникационные системы. Основные характеристики.
34.Структура современной интегрированной навигационной системы. Особенности функционирования. Концепция OMB.
35.Системы позиционирования подвижного объекта. Судовые радарные комплексы. Системы отображения электронных морских навигационных карт. Системы динамического позиционирования.
36.Береговая инфраструктура обеспечения безопасности судоходства в прибрежной зоне. Примеры в зоне порта Новороссийск.
37.Общие принципы автоматизации процесса швартовки судов. Примеры систем швартовки к стационарным причалам, ВПУ, танкеру накопителю.
38.Надежность бортовых электронных систем управления движением. Основные понятия, числовые параметры.
38.Понятие надежности технического изделия. Количественные показатели надежности.
40.Требования Регистра Морского Судоходства России к судовому радио- и навигационному оборудованию, его монтажу, эксплуатации.