

7.Системы автоматической стабилизации, закон регулирования, принципиальная электрическая и структурная схемы, назначение узлов.
Предназначены для поддержания постоянства регулируемой величины, при этом задающее воздействие остается постоянное.
Для данной системы закон управления следующим
Xзад(t)= const
Yтек(t)= const
Рассмотрим систему автоматического поддержания заданной угловой скорости вращения вала двигателя, питаемого от электромагнитного усилителя настроенная по принципу регулирования по отклонению.

ОУ- обмотка управления электромагнитного усилителя
ЭМ- электромагнитный усилитель
Д- двигатель
Тх- тахометр
РМ- рабочий механизм
U0-питающее напряжение
E- ЭДС электромагнитного усилителя
ω- частота вращения вала двигателя
етх- ЭДС тахометра
8.Системы программного управления, закон регулирования!?, принципиальная электрическая и структурная схемы!?, назначение узлов!?.
Система программного управления служит для измерения регулируемой величины во времени по определенному закону, который называется программа
Закон управления: xзад(t)=f(t)
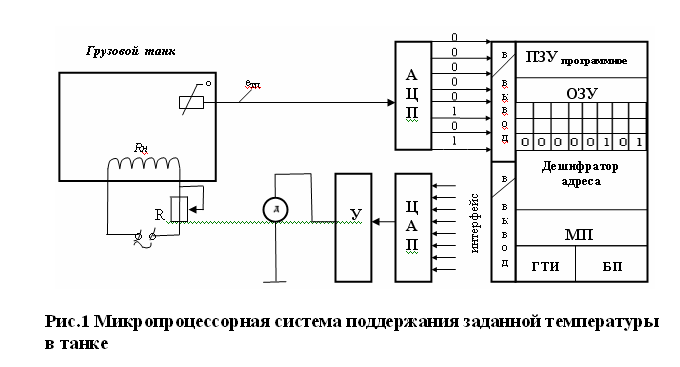
Рассмотрим микропроцессорную систему автоматического поддержания заданной температуры в грузовом танке.
Логический «0» представлен напряжением в пределах от 0В до 0,5В.
Логическая «1» представлена напряжением в пределах от 4,5В до 5,5В.
1 байт:
-
0
1
1
0
0
0
1
0
1 байт – одна ячейка памяти
9.Задачи линейной теории автоматического управления. Уравнения динамики сау и их решения.
Задачи линейной теории автоматического управления:
1 Изучение динамических свойств и характеристик различных звеньев автоматических систем любой физической природы
2 Формирование функциональных и структурных схем САУ
3 Построение динамических характеристик САУ
4 Определение показателей точности и ошибок САУ
5 Исследование устойчивости САУ
6 Оценка качественных показателей процесса управления
7 Изучение различных видов корректирующих устройств вводимых в САУ для повышения точности и улучшения динамических свойств.
Уравнения динамики САУ и их решение.
Исследование переходных процессов САУ основывается на использовании дифференциальных уравнений при изучении динамических процессов САУ. При этом отвлекаются от конкретной физической природы процессов, а используют лишь их математическую модель.
В основе построения математической модели лежит ее структурная схема, состоящая из типовых математических звеньев.
В свою очередь каждое типовое динамическое звено описывается дифференциальными или операторными уравнениями, которые описывают физическую природу происходящих в них процессах.

Процесс
дифференцирования Лаплас предложил
заменить функцией
 -
оператор Лапласа, а процесс интегрирования
на
-
оператор Лапласа, а процесс интегрирования
на
 ,
получил:
,
получил:

Одно конкретное устройство САУ (электродвигатель, реле, трансформатор) описывается одним дифференциальным уравнением.
Совокупность нескольких дифференциальных уравнений динамических звеньев представляет собой математическую модель всей системы и служит для получения общего характеристического уравнения системы в целом.
Аналитические методы расчета основаны на использовании классических или операторных методах:
1 Классическое вариационное исчисление
2 Принцип максимума Л.С.Понтрягина
3 Метод динамического программирования Р.Беллмана.