

2. Бортовые устройства регистрации. Бур являются частью бортовой аппаратуры нбаск, в состав которого входят бур пи и бур зи (рис. 3).


Рис. 3. Структурная схема бортовой части НБАСК
БУР ПИ предназначены для записи в полете на носитель информации параметров, которые характеризуют состояние ОК. Контролируемые параметры снимают с первичных измерительных преобразователей (ПИП) ОК, которые с помощью коммутатора подключают к каналу регистрации БУР ПИ, где сигнал от ПИП кодируют и выдают для записи в бортовой накопитель. БУР ПИ записывают данные (АП, РК, служебные данные) на носитель в виде кадров информации, где кадр представляет собой цикл опроса коммутатором всех измерительных каналов. Внутри кадра параметр (АП, группа РК) представлены в виде информационного слова, содержание которого определяет циклограмма БУР ПИ. Циклограмма определяет каналы регистации параметров и номер разряда регистрации РК.
БУР ЗИ предназначены для записи на носитель информации речи с выходов радиоприемников/самолетного переговорного устройства (СПУ), ларингофонов/абонентской гарнитуры и звуковой обстановки в кабине ВС.
2.1. Измерительный преобразователь. Современная измерительная техника позволяет измерить более двухсот различных физических величин (электрические, магнитные, тепловые, акустические, механические, оптические и т.д.), большую часть которых при измерении преобразуют в электрические величины. Это обусловлено достоинствами электрических измерений сигналов - точность измерения, простота усиления, простота и высокая скорость передачи на расстояние, простота, высокая скорость и точность преобразования в цифровой код и т.д.
Рис.
4.Структурная схема МСРП-64-2
Измерительный преобразователь (датчик) - это техническое устройство, которое предназначено для выработки сигнала измерительной информации в форме недоступной для непосредственного восприятия наблюдателем, но удобной для передачи, преобразования, обработки и хранения. В основе работы измерительного преобразователя используют какое-либо физическое явление/процесс, который происходит под действием измеряемой физической величины.
Для эффективного функционирования измерительный преобразователь должен отвечать таким требованиям:
- высокая статическая и динамическая точность работы, что обеспечивает минимальные искажения выходного сигнала;
- высокая избирательность, т.е. реагирование только на изменения той величины, для которой он предназначен;
- стабильность характеристик во времени;
- высокая надежность при работе в неблагоприятных условиях внешней среды;
- повторяемость характеристик;
- простота и технологичность конструкции;
- удобство монтажа и обслуживания;
- низкая стоимость.
Различают первичные и промежуточные измерительные преобразователи. ПИП стоят первыми в измерительной цепи, воспринимают измеряемую физическую величину и преобразуют ее в сигнал измерительной информации (например, терморезистор термометра сопротивления), а промежуточные - занимают любое место после первичного.
 Обычно
измерительный преобразователь
предназначен для выполнения одного
измерительного преобразования и
получения информации об одном параметре
- измеряемой
величине.
Все побочные параметры измерения
являются помехами.
Каждый измерительный преобразователь
имеет естественную входную величину,
для измерения которой на фоне помех он
предназначен. Аналогично выделяют
естественную выходную величину
преобразователя.
Обычно
измерительный преобразователь
предназначен для выполнения одного
измерительного преобразования и
получения информации об одном параметре
- измеряемой
величине.
Все побочные параметры измерения
являются помехами.
Каждый измерительный преобразователь
имеет естественную входную величину,
для измерения которой на фоне помех он
предназначен. Аналогично выделяют
естественную выходную величину
преобразователя.
2.2. Структура и принцип работы цифрового БУР ПИ с магнитным способом записи. В качестве примера рассмотрим БУР ПИ МСРП-64-2 (рис. 4). МСРП-64-2 записывает информацию, которая циклически поступает от ПИП по 64-м измерительным каналам (ОД, 48 АП, 32 РК, минутные отметки времени, служебные сигналы). Коммутатор подключает измерительные каналы к каналу регистрации с частотой 2 Гц. Информацию записывают на магнитную ленту 8-разрядным параллельным двоичным кодом с приведенной погрешностью 1,5% (без учета погрешности ПИП). За один цикл движения магнитной ленты (прямой и обратный ход) длительность записи данных составляет 24 ч. В состав МСРП-64-2 входит 2 накопителя: эксплуатационный и аварийный (включается вручную с пульта или автоматически при достижении заданной скорости полета).
Для формирования текущего информационного слова коммутатор, в зависимости от типа параметров (АП, РК, ОД), подключает измерительные каналы к 8-разрядному АЦП или распределителю дискретных данных.
Н
Рис.
4.Структурная схема МСРП-64-2
АЦП работает по принципу поразрядного кодирования (будет рассмотрен далее). Сигнал с ДАП устройство сравнения последовательно сравнивает с эталоном (8-разрядный АЦП имеет 8 эталонов). Уравновешивание сигнала с ДАП начинается с эталона, который равен половине максимального значения. В зависимости от результата сравнения получают значение в старшем разряде кода, который снимают с АЦП. Если эталон больше входной величины, то в старший разряд регистра преобразования заносят «0», а входную величину ypaвновешивают следующим эталоном, значение которого в 2 раза меньше предыдущего. Если первый эталон меньше или равен входной величине, то в старший разряд регистра заносят "1", а затем ypaвновешивают разность входной величины и первого эталона. Аналогичные действия выполняют для всех используемых эталонов. После окончания преобразования входная величина будет уравновешена суммой тех эталонов, у которых в соответствующих им разрядах регистра преобразования занесена "1". Погрешность АЦП q/2, где q = 2n-1 число уровней квантования (n - число разрядов АЦП).
С выхода ДРК (ПИП РК, не входят в комплект МСРП-64-2) снимают сигнал, который характеризует состояние агрегата или системы ВС типа "включен-выключен", "исправен-неисправен" и т.д. При наличии сигнала на входе ДРК с его выхода снимают +27В постоянного тока, а при отсутствии - 0В.
При выборе коммутатором канала регистрации РК (команда к8, к24, к40, к56) в распределителе дискретных сигналов запускается субкоммутатор, который в зависимости от поступившей команды разрешает распределителю съем сигнала с соответствующих 8-ми ДРК (наполняют данное информационное слово в соответствии с циклограммой). Состояние каждого бита информационного слова соответствует состоянию соответствующей РК (наличие РК - «1», отсутствие - «0»). На выходе распределителя формируется информационное слово измерительного канала в виде сигналов Р1..Р8.
№кадра |
Номер бита |
8 |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
|
БУР ПИ по каналу 0 записывает ОД (вводят с пульта управления): текущее время, номер борта и рейса, дата, месяц и последняя цифра года полета. При выборе коммутатором канала регистрации ОД (команда к0) в распределителе дискретных сигналов запускается субкоммутатор для формирования ОД в соответствии с форматом их представления по кадрам субкадра (состоит из 10 кадров), т.к. нельзя записать все ОД в одно информационное слово (см. таблицу). Информационное слово с ОД состоит из 2-х 4-разрядных слов закодированных в системе 2-4-2-1 (цифра указывает на вес разряда 4-разрядного слова). БУР ПИ производит запись на носитель служебную информацию (отметка времени (МОВ) с периодом 1 мин., калибровочные сигналы (напряжение 0 и 6,3В), адресные сигналы (канал, кадр, субкадр - используют при обработке ПИ)) при поступлении с коммутатора в распределитель дискретных сигналов команды ккадр. Сформированное информационное слово поступает с формирователя выходных сигналов в накопитель для записи на носитель информации (магнитный, съемное энергонезависимое запоминающее устройство). Пример расположения информации измерительных каналов 2..62 на магнитном носителе показан на рис. 5. |
Вес разряда слова в коде 2-4-2-1 |
2 |
4 |
2 |
1 |
2 |
4 |
2 |
1 |
|||
Наименование ОД |
|||||||||||
0 |
Час |
4р |
3р |
2р |
1р |
4р |
3р |
2р |
1р |
||
Десятки |
единицы |
||||||||||
1 |
Минута |
4р |
3р |
2р |
1р |
4р |
3р |
2р |
1р |
||
Десятки |
единицы |
||||||||||
2 |
Число |
4р |
3р |
2р |
1р |
4р |
3р |
2р |
1р |
||
десятки |
единицы |
||||||||||
3 |
Месяц |
4р |
3р |
2р |
1р |
4р |
3р |
2р |
1р |
||
десятки |
единицы |
||||||||||
4 |
последняя цифра года |
|
4р |
3р |
2р |
1р |
|||||
единицы |
|||||||||||
5 |
номер рейса |
4р |
3р |
2р |
1р |
4р |
3р |
2р |
1р |
||
тысячи |
сотни |
||||||||||
6 |
4р |
3р |
2р |
1р |
4р |
3р |
2р |
1р |
|||
десятки |
единицы |
||||||||||
7 |
номер объекта |
|
4р |
3р |
2р |
1р |
|||||
десятки тысяч |
|||||||||||
8 |
4р |
3р |
2р |
1р |
4р |
3р |
2р |
1р |
|||
тысячи |
сотни |
||||||||||
9 |
4р |
3р |
2р |
1р |
4р |
3р |
2р |
1р |
|||
десятки |
единицы |
||||||||||
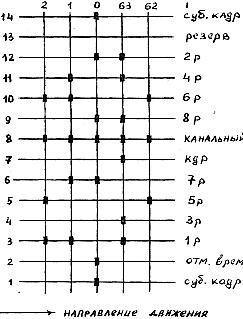
Рис. 5. Расположение информации по дорожкам носителя МСРП-64-2