

Теория регулирования
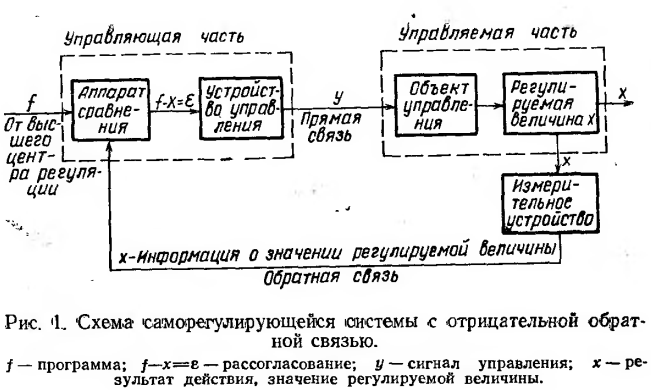
Кибернетическая система имеет в своем составе управляемую и управляющую части, соединенные канала-Ми связи. Саморегулирующиеся системы содержат, как правило, прямую и обратную связи между управляющей и управляемой частями системы (рис. 1).
Устройство управления, которое является элементом Управляющей части системы, производит управление соответствующим объектом. Существует множество определений управления. По А. И. Бергу, управление — это процесс перевода системы из одного состояния в другое путем воздействия на ее переменные.
25
Любой объект управления характеризуется какой-либо регулируемой величиной. Например, кровь и сердечно-сосудистая система как объекты управления имеют следующие регулируемые величины: кровяное давление, осмотическое давление, концентрацию глюкозы, кислорода В крови И пр. Объект управления является динамической системой: его регулируемая, величина всегда имеет тенденцию к изменению в результате действия различных возмущений. Возмущением считается, любое внешнее воздействие на объект управления, при водящее к изменению регулируемой величины. Напримёр, для такой регулируемой величины, как концентрация глюкозы в крови возмущениями являются поступление глюкозы из печени или кишечника в кровь и на оборот—поступление глюкозы из крови в ткани.
В результате передачи сигнала по каналу прямой связи к объекту. Ранее отмечалось, что сигналы управления модулируют энергетические процессы в объекте управления, в результате чего состояние объекта управления изменяется в соответствии с принятыми сигналами, т. е. в соответствии с принятой информацией. При этом регулируемая величина принимает какое-то значение.
В простых системах управление осуществляется без контроля за исполнением приказов. Команды исполнительному звену системы выдаются по заданной жесткой программе. Подобным образом построено управление станками-автоматами с программой, записанной на пер-
26
фокартах или магнитной ленте. Управление на основе только прямой связи в простых системах возможно благодаря – тому, что объекты управления в этих системах не подвержены действию возмущений. Если же эти возмущения, то система выходит из строя. Например, если в станке-автомате деталь выпадает из зажима, то процесс обработки прекращается.
В сложных динамических системах, подверженных
возмущениям, управление, как правило, происходит
при наличии обратной связи и контроля за процессом управления. Роль обратной связи между объектом управления и управляющей частью выполняет какое-либо измерительное устройство и канал обратной связи. Измерительное устройство измеряет реальное значение регулируемой величины х и посылает эту информацию в управляющую часть. Информация о реальном значении регулируемой величины поступает в аппарат сравнения, который производит сравнение реального значения регулируемой величины х с заданным, программным значением f. Для этого аппарат сравнения должен .обладать указанной программой f, по которой и осуществляется управление. Как указывалось выше, эта программа может быть как заложена в структуре самого аппарата сравнения, так и вводиться извне от более высших центров регуляции. На основе сравнения, которое мы обозначим как вычитание: f—х, аппарат сравнения определяет рассогласование между программным и реальным значением регулируемой величины и информацию о величине рассогласования передает в устройство управления. Устройство управления на основе величины рассогласования вырабатывает соответствующий корректирующий сигнал управления, который передается на объект управления. Сигнал управления имеет такое информационное содержание, которое приводит к изменению процессов в объекте управления в сторону уменьшения рассогласования. Информация" о результате действия снова передается измерительным устройством в управляющую часть, которая вновь производит коррекцию управления. Описанный процесс регулирования будет продолжаться до тех пор, пока рассогласование не станет равным нулю. Так как на систему постоянно действуют возмущения и в результате того, что любая система обладает инерцией, процесс регулирования происходит постоянно.
27
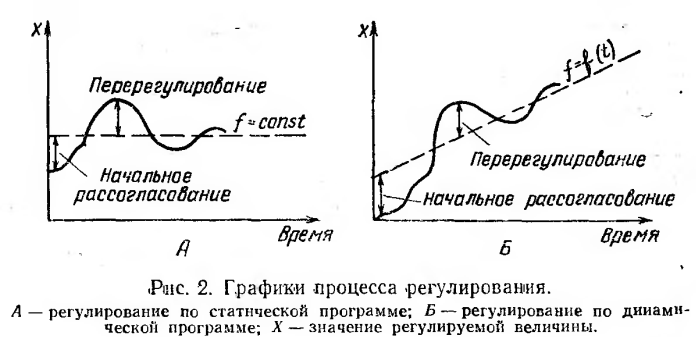
При этом регулируемая величина совершает колебания около заданного значения (рис. 2).
Программа, по которой осуществляется управление, может быть статической — неизменной во времени и динамической — когда программное значение регулируемой величины является функцией времени (см. рис. 2).
Если программа вводится в аппарат сравнения высшим центром регуляции, то система регулирования может работать в любом режиме, задаваемом этим высшим центром.
Эффективность управления зависит от количественной характеристики, регулирующей системы во времени. Если на объект управления подействовало возмущение, то регулируемая величина отклоняется от за данного значения —возникает начальное рассогласование. В процессе дальнейшего регулирования величина приближается к программному значению. Кривая, по которой регулируемая величина переходит от одного значения к другому, называется кривой переходного процесса или кривой процесса регулирования. Чем быстрее происходит согласование регулируемой величины с заданным значением, и чем ближе кривые регулирования к заданной программной линий, тем лучше параметры регулятора,
Количественным показателем процесса регулирования может быть площадь регулирования, которая представляет собой площадь замкнутой области, ограниченную с одной стороны линией программного значения регулируемой величины, а с другой — кривой переходного процесса. При этом чем меньше площадь ре-
28
гулирования, тем выше его качество. Данный метод оценки качества регулирующих систем может быть применен в физиологических и медицинских исследованиях. Различные функциональные пробы, которые применяются в физиологии и медицине, являются дозированными возмущениями. Введение показателя — площади регулирования — позволит количественно оценить регулирующие системы организма, что будет способствовать повышению объективности медицинской диагностики. При этом за линию программного значения регулируемой величины может быть принята линия равновесного режима, получаемая в условиях отсутствия возмущений.
Таким образом, любая система управления может быть охарактеризована тремя следующими особенностями:
1) прямой связью между управляющей и управляемой частями системы, по которой поступают сигналы управления;
2) обратной связью управляемой и управляющей частей системы, которая позволяет контролировать процесс управления и производить его коррекцию;
3) переработкой информации о текущем со стоянии управляемого объекта, поступающей по каналам обратной связи, в сигналы управления и осуществляемой при посредстве аппарата сравнения.
В организме все процессы являются регулируемыми и регуляция осуществляется на основе наличия обратной связи. В отличие от технических систем биологические обратные связи характеризуются нелинейностью, когда между выходной величиной и результатом коррекции нет прямой зависимости. Это способствует повышению точности регулирования. Так, если компенсирующий эффект прямо пропорционален возмущению или рассогласованию, то за время, в течение которого происходит включение корректирующих механизмов, продолжающееся действие возмущения приводит к не. учитываемому отклонению регулируемой величины от первоначального значения. Поэтому последующая коррекция на основе ранее зафиксированного рассогласования не дает желаемого эффекта. Как показано Гольдманом, особенность регулирующих систем организмов состоит в том, что регулирование в них осуществляется как по отклонению—рассогласованию, так и по его первой и второй производным, т. е. по скорости и ускорению рассогласования. Это обеспечивает большую точ- 29
ность регулирования и позволяет организму избегать
состояний, опасных ДЛЯ жизни.
0братная связь имеет большое значение в регулировании самых различных процессов в организме. П.К.. Анохин ещё в 1935 г. указал на важное значение обратной связи, названной им обратной афферентацией, для осуществления приспособительных реакций нервной системы. Если раньше в физиологии было понятие о рефлекторной дуге, то в настоящее время общепризнано наличие рефлекторного кольца. Рефлекторная дуга замыкается обратной связью между эффекторами и центральной нервной системой.
Все произвольные движения человека осуществляются при наличии обратных связей. Это можно продемонстрировать на самом простом примере. Допустим, человек выполняет целенаправленный двигательный акт, например, пытается взять со стола какой-нибудь предмет. При этом нервные импульсы от головного мозга идут по соответствующим нервам к мышцам руки и вызывают ее движение. Это прямая связь, по которой поступают сигналы управления. Движение руки все время контролируется зрительным — и кинетическим анализаторами. Информация от этих двух рецепторов, осуществляющих обратную связь, поступает в мозг, где результат действия сличается с программой достижения цели. На основе этого вырабатываются корректирующие сигналы, и реальная траектория движения руки приближается к заданной (схема 2). Благодаря этой постоянной коррекции человек может совершать точные целенаправленные движения. В контролировании движений принимают участие и другие анализаторы.
Регулирование процессов на основе обратных связей наблюдается не только на уровне целого организма, как в приведенном примере, но и на молекулярном, клеточном и системном уровнях организации. Саморегуляция в некоторой степени присуща самим химическим реакциям. Свойство саморегуляции химических реакция, направленное на стабилизацию выхода продуктов реакции, отражено в принципе Ле-Шалелье:
если на химическую систему действуют возмущения,
то процессы в системе перестраиваются так, чтобы компенсировать действие возмущения и стабилизировать
систему.
30
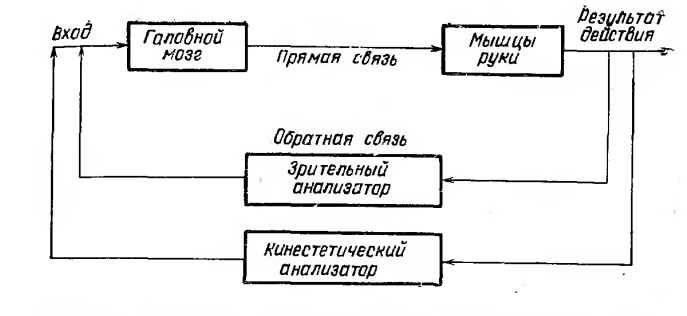
Схема 2. Схема системы управления рукой при совершении целенаправленного движения.
Можно привести такой пример саморегуляции химической реакции в организме. Известно, что универсальным источником энергии в клетках является энергия гидролиза АТФ. АТФ образуется за счет энергии гликолиза и окислительного фосфорилирования. Оказывается, что концентрация АТФ в клетках способна поддерживаться на постоянном уровне в большой степени за счет собственного механизма саморегуляции. Если увеличивается распад АТФ (при возрастании активности клеток), то это приводит к увеличению концентрации АДФ и минерального фосфата. Повышение концентрации АДФ и фосфата, согласно закону действующих масс, стимулирует окислительное фосфорилирование, что приводит к увеличению выхода АТФ (схема 3). При снижении скорости расщепления АТФ уменьшаются стационарные концентрации АДФ и фосфата, что приводит к снижению интенсивности фосфорилирования и к уменьшению выхода АТФ. В данном случае информация, которая используется для регулирования, передается через изменение стационарных концентраций реагирующих веществ. Данный вид регуляции может контролироваться другими механизмами, например, путем изменения проницаемости мембран, которое будет вызывать изменение стационарных концентраций. Важно отметить, что кодирование внешней информации в виде набора стационарных концентраций происходит независимо от информации нуклеиновых кислот. По мнению некоторых ученых, механизмы биологической информа-
31
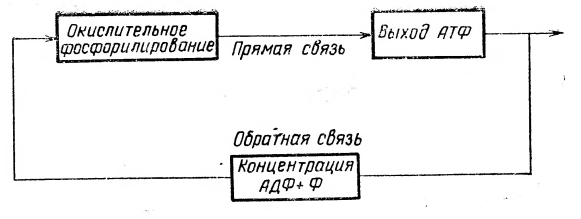
Схема 3. Схема саморегуляции реакций синтеза я распада АТФ.
ции, связанные со стационарными концентрациями и мембранами, являются более древними, чем механизмы, связанные с нуклеиновыми кислотами.
Очень важным свойством живых систем является поддержание гомеостаза, под которым понимается постоянство параметров внутренней среды организма. Основная идея гомеостаза состоит в том, что организм изменяет свои внутренние и внешние связи так, чтобы сохранить постоянство ряда существенных для него показателей внутренней среды. Гомеостатическими величинами у млекопитающих являются температура тела, активная реакция и осмотическое давление крови, концентрация кислорода, глюкозы, ионов в крови и т. д.
Поддержание гомеостаза осуществляется в результате саморегуляции на основе обратной связи. Во всех
случаях роль управляющей части выполняют головной
мозг, где главное значение принадлежит гипоталамусу, и железы внутренней секреции. Управляемой частью являются внутренние органы и мышцы. Каналами прямой
и обратной связи служат эфферентные и афферентные нервы и кровеносное русло, по которому передается гуморальное воздействие. Измерительным устройством являются рецепторы: терморецепторы, хеморецепторы и пр. Гомеостатические механизмы поддерживают регулируемые величины на оптимальном уровне. При действии небольших возмущений (изменении внешних условий) регулируемые величины не изменяют своих значений. При действии сильных возмущений регулирующие механизмы переводят их на другой, более оптимальный уровень. При этом все уровни лежат в пределах физиологических норм отклонений. Наконец, при очень значительном изменении внешних условий регулирующие механизмы не способны поддер-
32
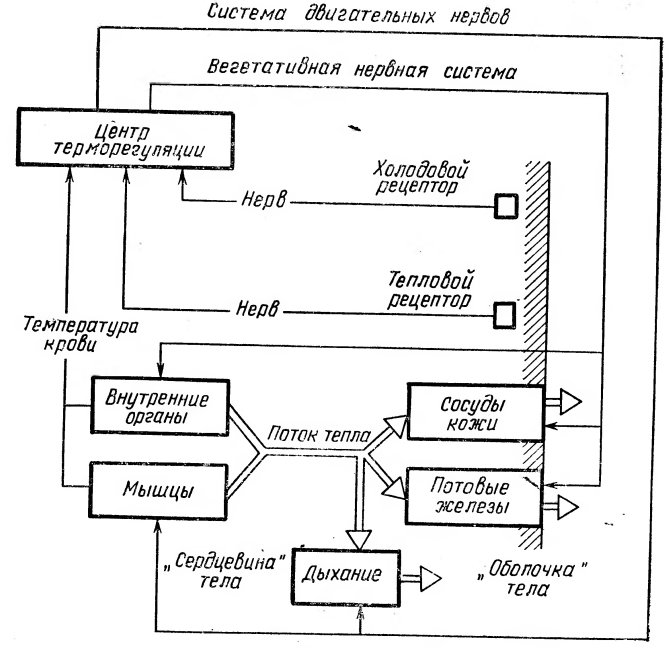
Рис. 3. Схема регулирования температуры тела (по Хэнзелу, 1966).
живать гомеостаз. Регулируемые величины выходят за пределы физиологических норм развивается патологическое состояние.
Работу гомеостатических систем регулирования можно проследить на примере работы системы регулирования температуры тела у гомойотермных животных (рис. 3). Регулирование осуществляется центрами терморегуляции, локализованными в гипоталамусе. Регулирование происходит по динамической программе: утром средняя температура тела человека 36,5 °С, вечером 37,5 °С; точность регулирования ±0,1 °С.
Температура тела поддерживается на определенном уровне благодаря тому, что скорость теплопродукции в организме равняется скорости теплоотдачи. Первичными источниками тепла в организме являются процессы
Медицинская биофизика
33
окисления в мышцах (зависят от интенсивности мышечной деятельности) и во внутренних органах. При изменении интенсивности данных процессов изменяется скорость теплопродукции. Скорость теплоотдачи изменяется в результате следующих основных процессов: изменений интенсивности потоотделения, кровотока в коже, частоты дыхания, величины поверхности тела, положения волос. Если температура тела отклоняется от заданного значения, то информация об этом от терморецепторов, а также непосредственно с кровью, омывающей гипоталамус, поступает в центр регуляции. Центр терморегуляции на основе анализа этой информации вырабатывает соответствующие сигналы управления и посылает их по двигательным и вегетативным нервам к органам, ответственным за теплопродукцию и теплоотдачу. В результате этого скорости теплопродукции и — теплоотдачи изменяются таким образом, что рассогласование устраняется. Точность регулирования температуры тела обусловлена тем, что терморецепторы кожи посылают в центр регуляции информацию о действии возмущений (изменении температуры внешней среды) еще до того, как начинает изменяться температура тела. Кроме того, точность регулирования зависит и от условнорефлекторной деятельности, которая позволяет центру регуляции «предвидеть» действие возмущений и заранее выработать соответствующие сигналы управления.
Необходимым условием нормального функционирования гомеостатических механизмов являются сохранность и нормальная работа всех элементов замкнутого контура регулирования. Патологическое состояние может вызываться как нарушением работы элементов, относящихся к управляющей части и системе прямой связи так и нарушением работы элементов, относящихся к системе контроля и обратной связи. Механизмы обратной связи в организме в настоящее время изучены сравнительно слабо. А между тем значение их имеет исключительно большое значение в медицине.
Например, диабет не всегда вызывается нарушением функций поджелудочной железы, он может быть связан также с патологией глюкорецепторов.
Все вышеописанные системы регулирования имеют отрицательную обратную связь. Можно отметить, что наличие отрицательной обратной связи всегда приво- 34
дит к устранению рассогласования в системе, к стабилизации системы. Имеется и другой вид обратной связи — положительная обратная связь. Примером системы с положительной обратной связью может служить такое явление: от симпатического отдела вегетативной нервной системы идут импульсы к надпочечникам (прямая связь). В кровь при этом выделяется адреналин. Оказывается, что, достигая мозга по кровеносному руслу, адреналин активизирует — нервную систему, что приводит к повышению частоты импульсов к надпочечникам и к более интенсивному выделению адреналина. Возрастание активности продолжается до тех пор, пока клетки не достигнут некоторого предела своих возможностей. В данном случае адреналин осуществляет обратную связь надпочечников с мозгом. При положительной обратной связи элементы системы объединяются в замкнутый контур, каждый элемент стимулирует последующий к изменению. За счет этого процессы в системах с положительной обратной связью развиваются с ускорением. При этом ускорение может быть как в сторону усиления выходного эффекта, так и в сторону его ослабления. Положительная обратная связь поддерживает
неравновесное состояние системы – рассогласование в данных системах с течением времени увеличивается. Под рассогласованием нужно понимать не разность между реальным и заданным значениями регулируемой величины, как в случае отрицательной обратной связи, а разность между настоящим и последующим значением регулируемой величины.
Положительная обратная связь встречается там, где за небольшой промежуток времени необходимо получить максимальное значение выходного эффекта, В технике она применяется для генерирования колебаний в различных электронных схемах. Примером механизма с положительной обратной связью в клетке является генерирование потенциала действия. При этом деполяризация клеточной мембраны приводит к увеличению проницаемости мембраны для натрия. Увеличение проницаемости мембраны обусловливает более сильную диффузию натрия в цитоплазму и еще большее изменение мембранной разности потенциалов. За счет положитель-
3* 35
ной обратной связи, потенциал действия достигает максимального значения за десятитысячные доли секунды.
Примером явления с положительной обратной связью может служить развитие некоторых патологических процессов в организме. Вследствие действия какого-либо чрезмерного раздражителя происходит нарушение деятельности какого-то одного органа. Нарушение деятельности этого органа выводит из равновесия следующий, а тот в свою очередь по обратным связям воздействует снова на первый, усугубляя его патологию (как это бывает при шоке).
Регулирование на уровне целостного организма. Живой организм представляет собой сложную саморегулирующуюся систему. Организм состоит из ряда более простых систем — физиологических систем. У высших животных мы различаем нервную, сердечно-сосудистую, пищеварительную и другие системы. Физиологические системы функционируют в тесной взаимосвязи друг с другом, обеспечивая целостные реакции всего организма. Деятельность живого организма как единой интегративной системы происходит благодаря тому, что в организме имеются специфические регулирующие системы, осуществляющие взаимосвязь всех остальных систем организма. Длительный эволюционный процесс постепенного усложнения биологических систем путем надстройки все новых уровней регуляции привел к появлению организмов с многоуровневой и разнотипной регуляцией.
По Н. М. Амосову, существуют четыре типа регулирующих систем. Первая система условно названа химической неспецифической системой. Она обеспечивает взаимодействие клеток и органов через продукты обмена: продукты обмена одного органа воздействуют на другие органы и изменяют их деятельность. Продукты обмена — (метаболиты — не являются ни гормонами, ни медиаторами.
Вторая регулирующая система — эндокринная, или гормональная. Эндокринная система осуществляет регуляцию деятельности различных органов путем выделения особых веществ — гормонов.
Третья регулирующая система представлена вегетативной нервной системой. С помощью нервной системы осуществляется дистанционное и оперативное управление из одного центра одновременно несколькими объек-
36
тами. Основная функция вегетативной нервной системы— поддержание гомеостаза.
Четвертая регулирующая система — это головной мозг и центральная нервная система. Головной мозг выполняет, с одной стороны, высшие функции по поддержанию гомеостаза, с другой — функцию уравновешивания целостного организма с внешней средой.
Для физиологии последних десяти лет характерен системный подход к изучению процессов в организме. Данное направление базируется не на представлении о физиологических системах, которое является более морфологическим, а на представлении о функциональных системах. Под функциональной системой, по П. К. Анохину, понимается совокупность разнородных органов и тканей, обеспечивающих выполнение определенной функции организма. Примером функциональной системы является система регулирования температуры тела (см. рис. 3). В основе функциональной системы лежит система саморегуляции с отрицательной обратной связью, которая регулирует какую-либо величину. Благодаря наличию отрицательной обратной связи функция устойчива и стабильна к действию возмущений.
Представление о функциональных системах является более плодотворным при анализе целостных реакций организма, чем представление о физиологических системах, так как оно позволяет лучше устанавливать связи между органами при выполнении функций. Б функциональную систему всегда входят элементы, относящиеся к различным физиологическим системам, и в обязательном порядке элементы двух основных регулирующих систем организма: нервной и эндокринной. По существу, функциональная система является единицей интегративной деятельности организма. Регулирующие механизмы функциональных систем обеспечивают адекватные ответы на различные воздействия. Общность всех этих ответов состоит в уравновешивании функциональной системы целостного организма путем приведения ее к стационарному режиму.
Особенность регулирующих механизмов, лежащих в основе функциональных систем, состоит в том, что управляющие системы образуют несколько этажей и регулирование осуществляется на нескольких уровнях. Например, постоянство концентрации глюкозы в крови может поддерживаться гомеостатическим механизмом
37
Рис. 4. Общая схема регулирования уровня сахара в крови (по Дришелю, 1966).
печени. Вторым уровнем регулирования является гомеостатический механизм поджелудочной железы (рис. 4). Этот механизм без вмешательства мозга (гипофиза) с помощью гормонов инсулина и глюкагона регулирует содержание сахара в крови. Наконец, третий уровень представлен гипофизом и промежуточным мозгом, на-
38
ходящимися под контролем коры больших полушарий. Гипофиз и промежуточный мозг при помощи своих гормонов способны как непосредственно, так и через поджелудочную железу изменять уровень сахара в крови. Взаимодействие низших и высших уровней сложной системы основано на обмене информацией по принципу обратной связи. Низшие уровни обладают известной автономностью. Пока поступающая информация не выходит за определенные пределы, они способны самостоятельно вырабатывать соответствующие целесообразные реакции. При этом на высший уровень не посылаются никакие сообщения, и высшие уровни могут не принимать участия в местных регуляторных процессах. Вмешательство высших уровней в работу низших происходит в том случае, когда последние не способны перерабатывать весь поток информации при действии значительных возмущений.