

Приложение 1.
Эксперимент. Прием M-PSK сигналов.
М=4; 16;
![]() ,
=0.1;
0.2,
,
=0.1;
0.2,
![]() Гц.
Гц.
М=4.
1) Фазовая и тактовая синхронизация идеальны, фазовые шумы отсутствуют.
![]() .
.
![]()
![]()
![]()
![]()
![]()

2) а. СКО фазовых
шумов
![]() ,
,
![]() Гц,
тактовая синхронизация идеальная.
Гц,
тактовая синхронизация идеальная.

![]()

2) б. СКО фазовых
шумов
,
![]() Гц,
тактовая синхронизация идеальная.
Гц,
тактовая синхронизация идеальная.


3) а. =0.1, б. =0.2, фазовая синхронизация идеальная.
|
0.0001 |
0.001 |
0.005 |
0.01 |
0.05 |
0.1 |
|
31 |
21 |
14 |
11 |
4 |
1 |
а.
|
0 |
0 |
0 |
0 |
0.005 |
0.031 |
б. |
0 |
0 |
0 |
0 |
0.002 |
0.045 |
4) =0.2, Гц, М=4.
|
0.0001 |
0.001 |
0.005 |
0.01 |
0.05 |
0.1 |
дб |
31 |
21 |
14 |
11 |
4 |
1 |
|
0 |
0 |
0 |
0 |
0.002 |
0.044 |
Выводы. Заданные значения ошибки по фазе, частоте и задержке на прием сигнала 4-PSK практически не влияют.
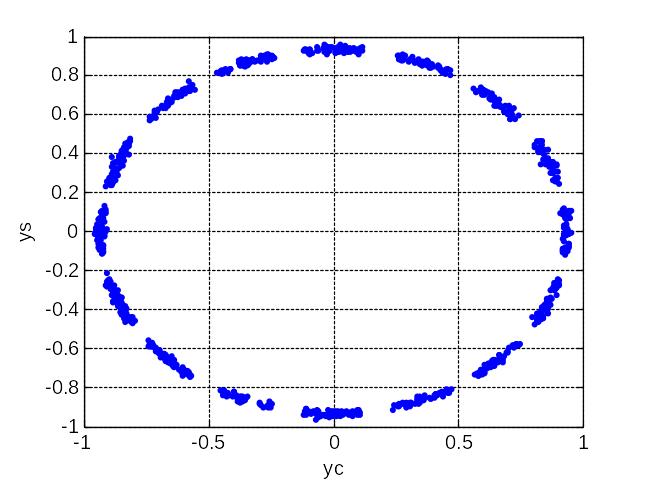
Далее рассмотрим процедуру детектирования сигнала 16-PSK.
При идеальной фазовой и тактовой синхронизации и отсутствии фазовых шумов имеем результат:
|
0.0001 |
0.001 |
0.005 |
0.01 |
0.05 |
0.1 |
дб |
31 |
21 |
14 |
11 |
4 |
1 |
|
0 |
0 |
0.004 |
0.053 |
0.391 |
0.536 |
Пусть фазовая и тактовая синхронизации реализованы с ошибками:
=0.2, Гц, тогда получим:
|
0.0001 |
0.001 |
0.005 |
0.01 |
0.05 |
0.1 |
дб |
31 |
21 |
14 |
11 |
4 |
1 |
|
0 |
0 |
0.025 |
0.097 |
0.438 |
0.576 |
Выводы. Для сигнала 16-PSK те же ошибки синхронизации приводят к увеличению вероятности ошибки приема символа.
Таким образом, при увеличении числа позиций М для качественного приема необходимо большее отношение сигнал/шум.
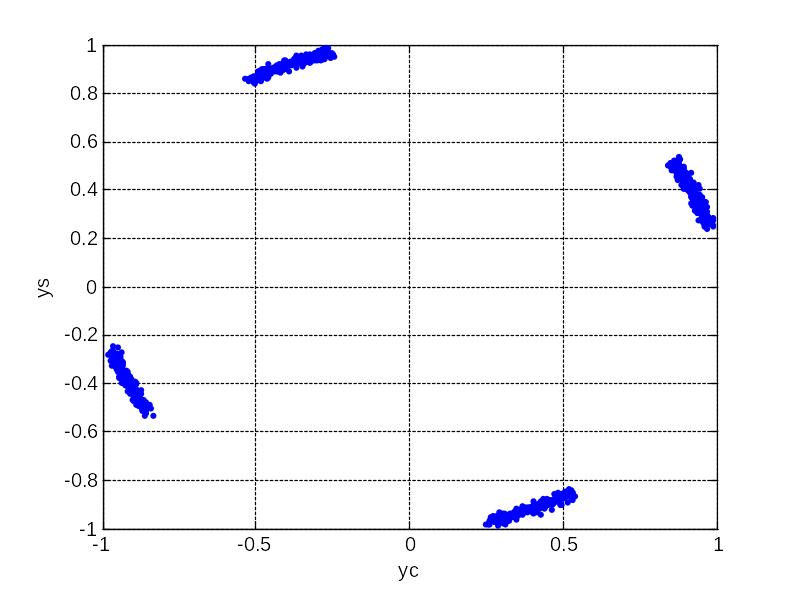
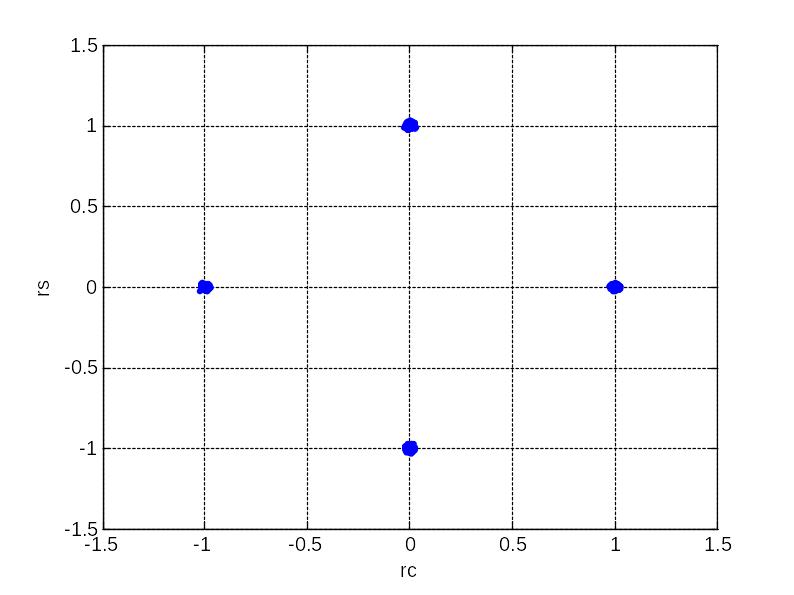
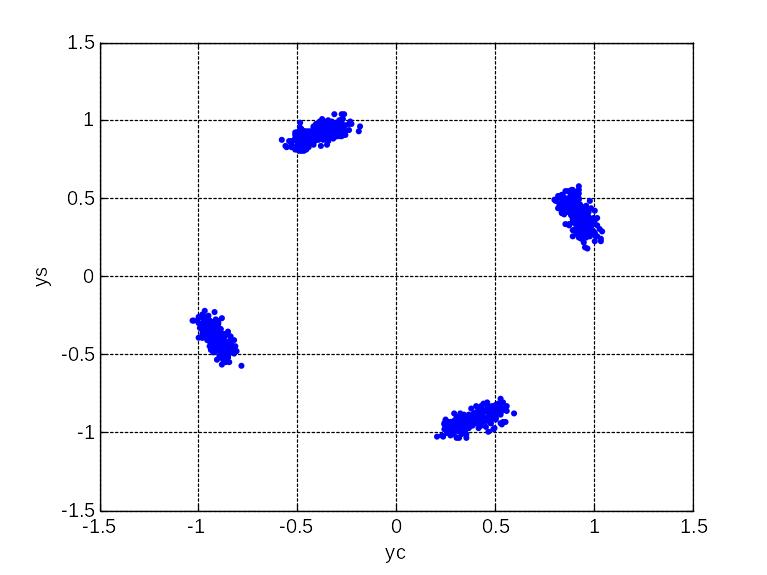
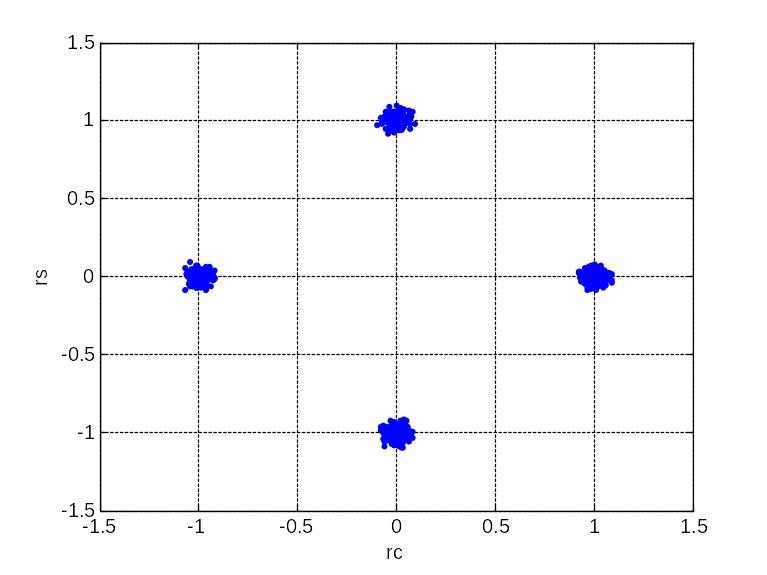
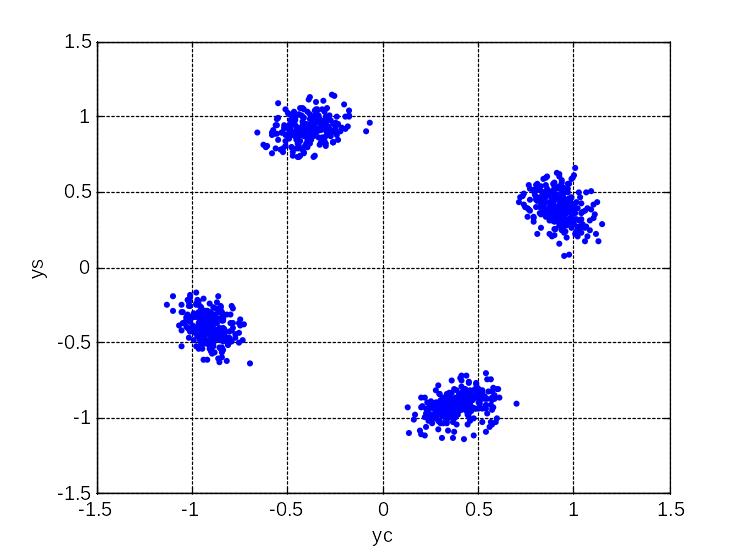
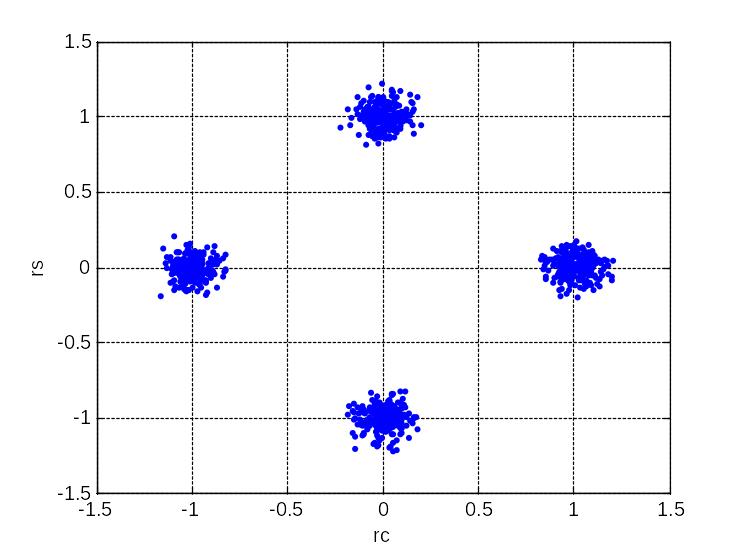
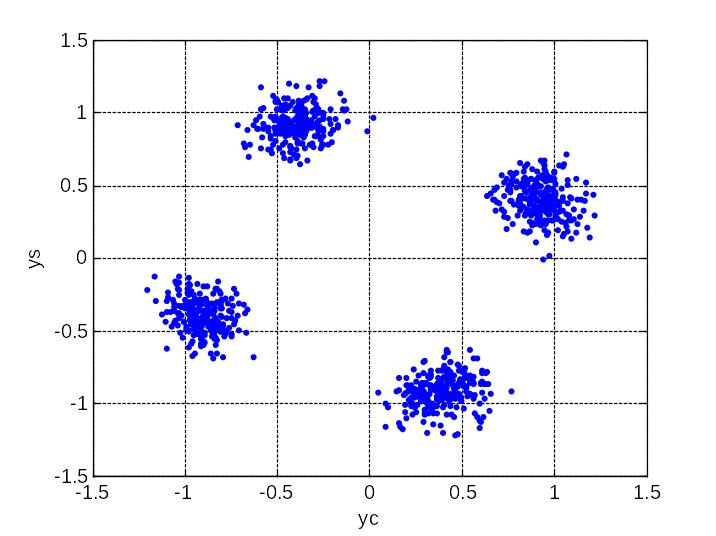
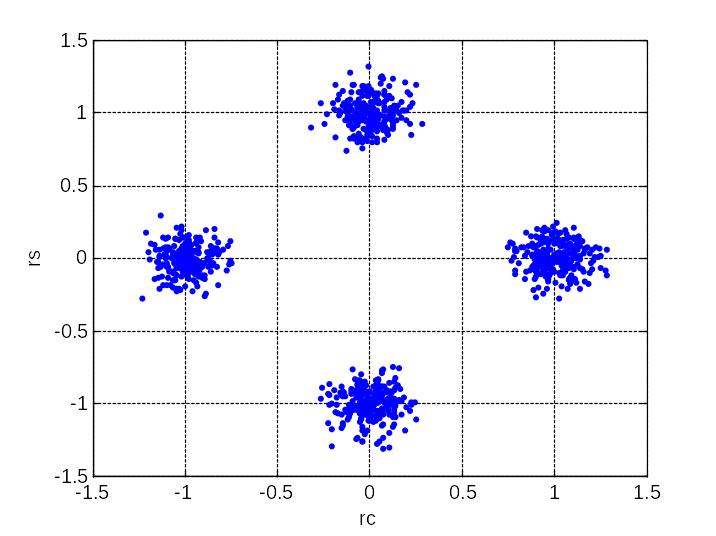
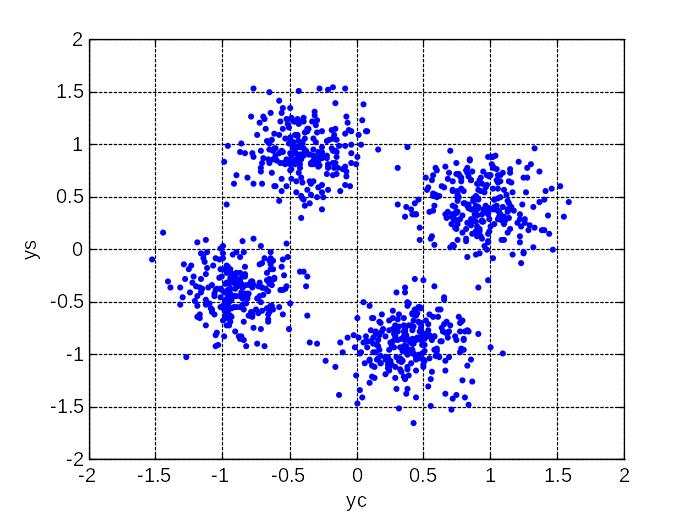
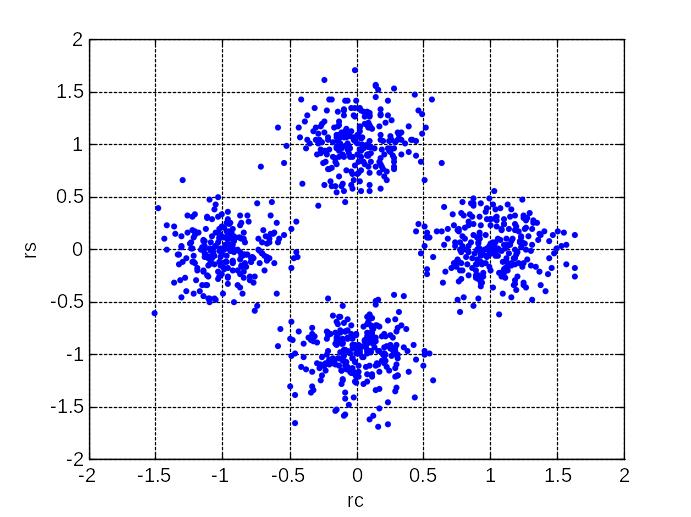
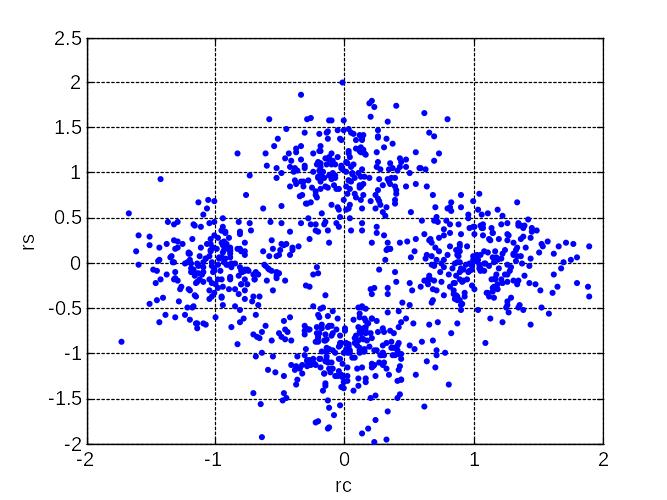
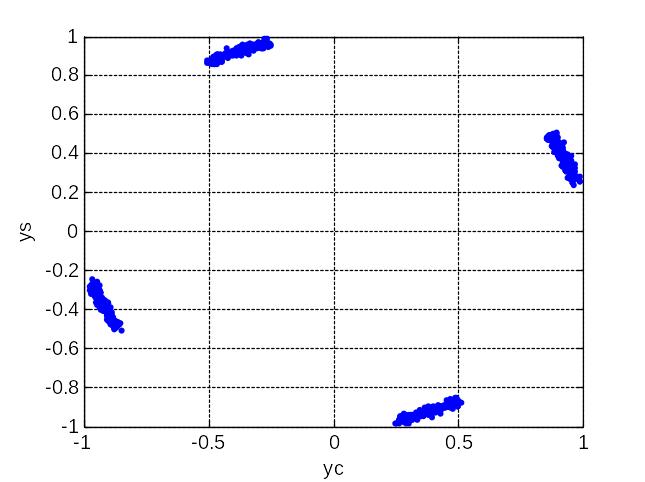
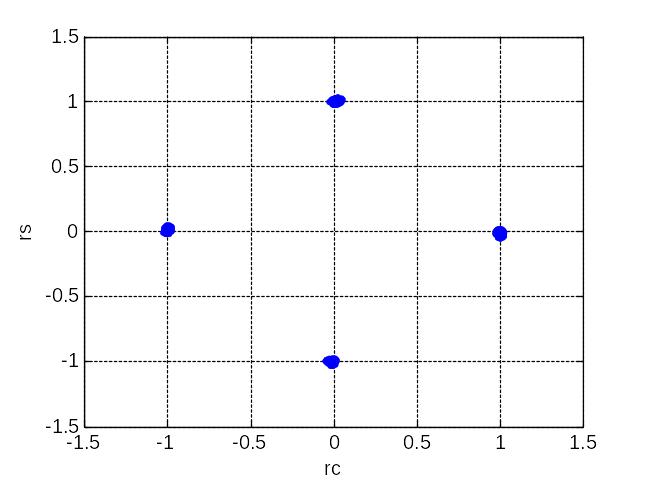
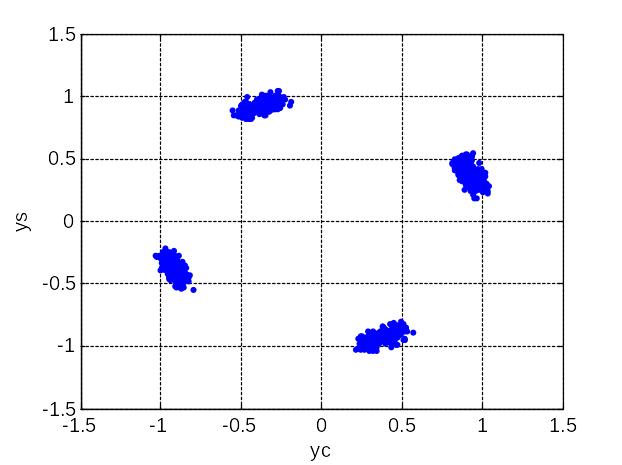
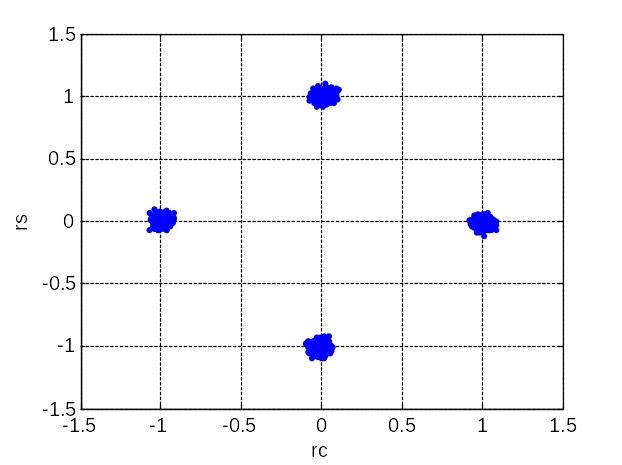
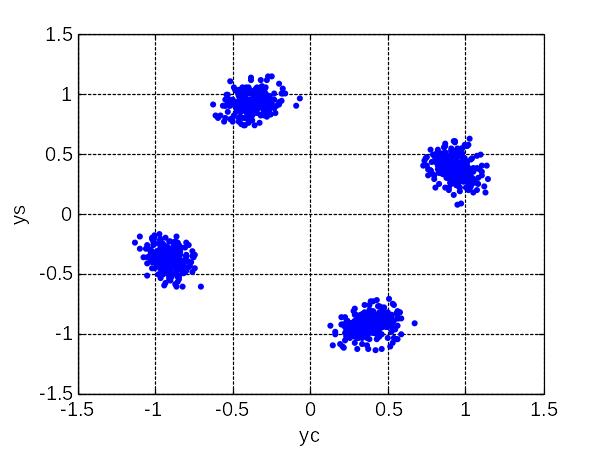
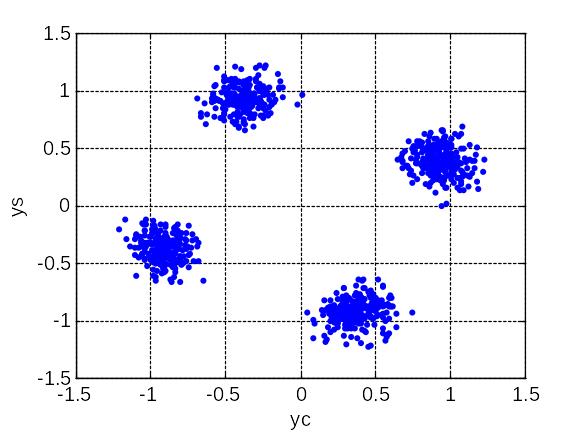
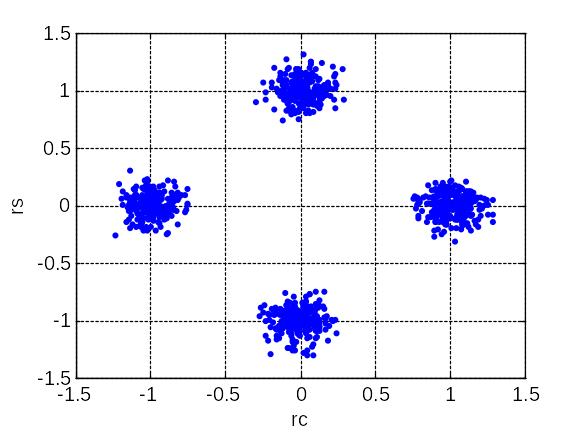
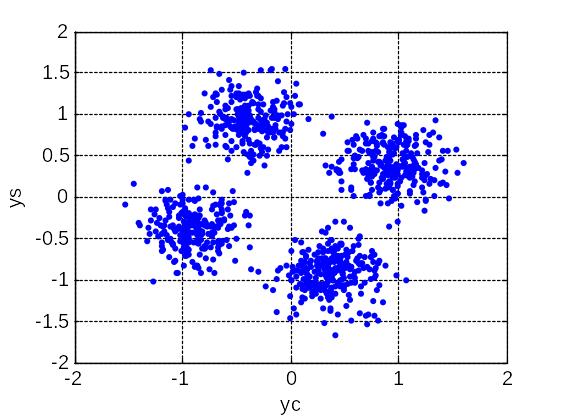
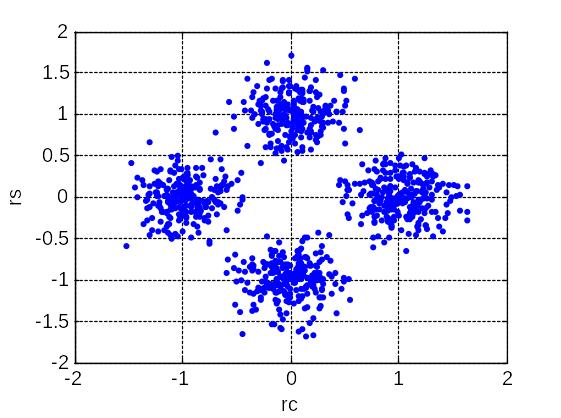
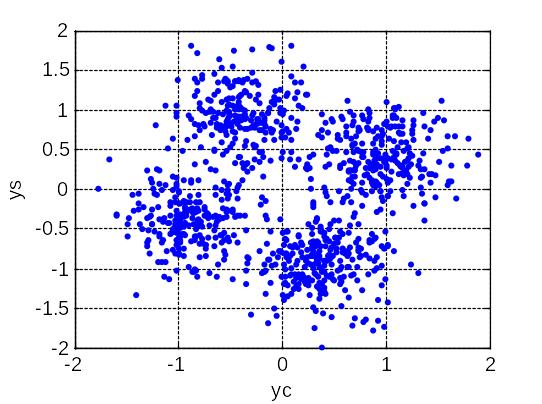
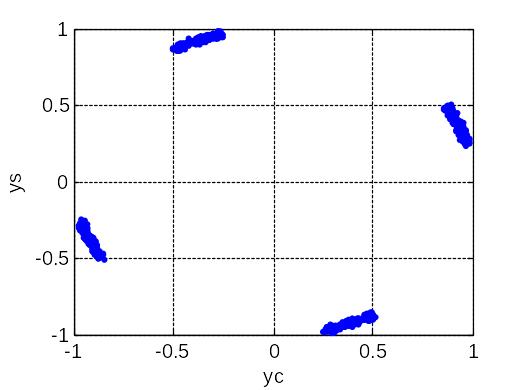
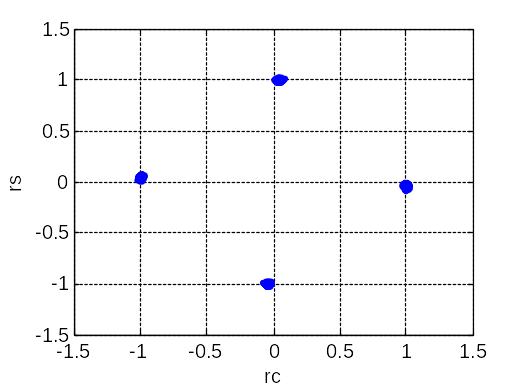
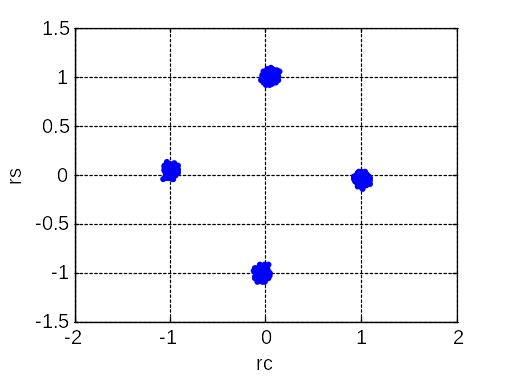
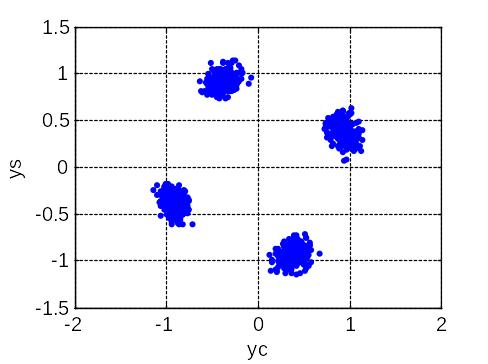
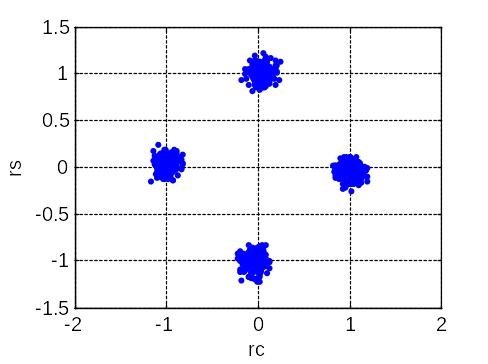
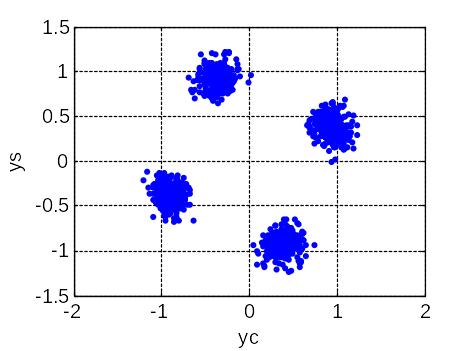
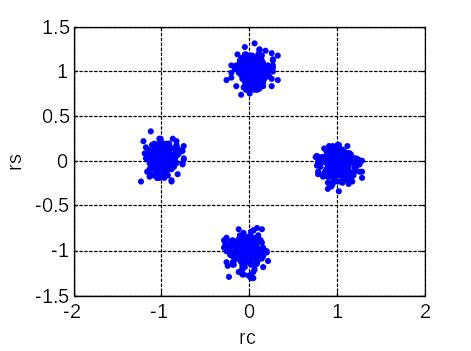
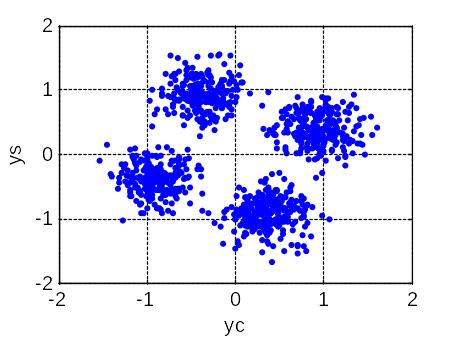
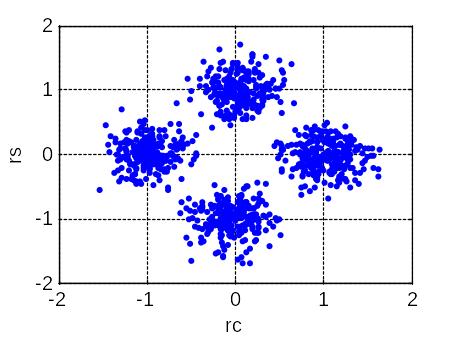
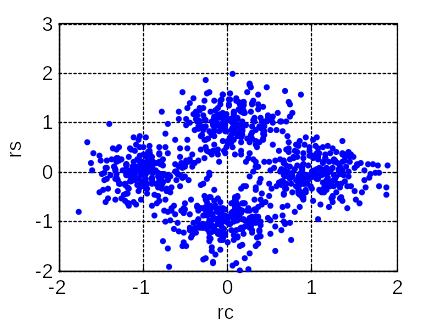
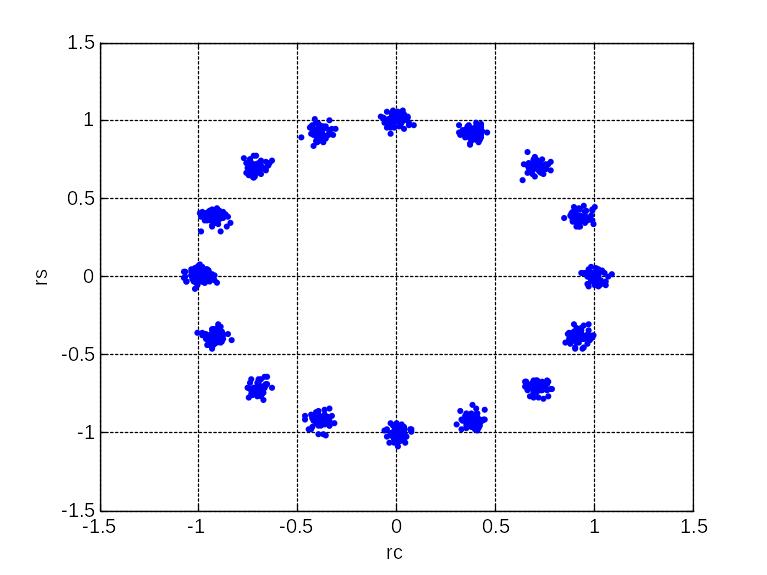
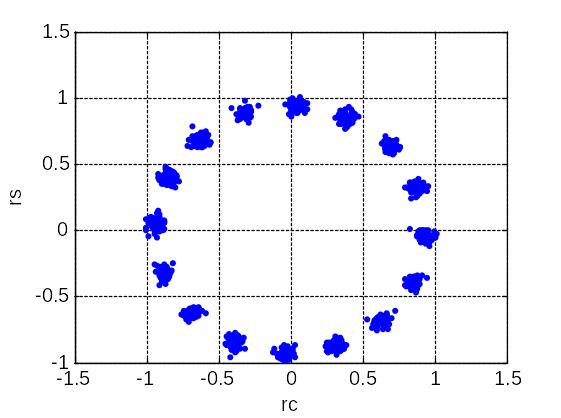
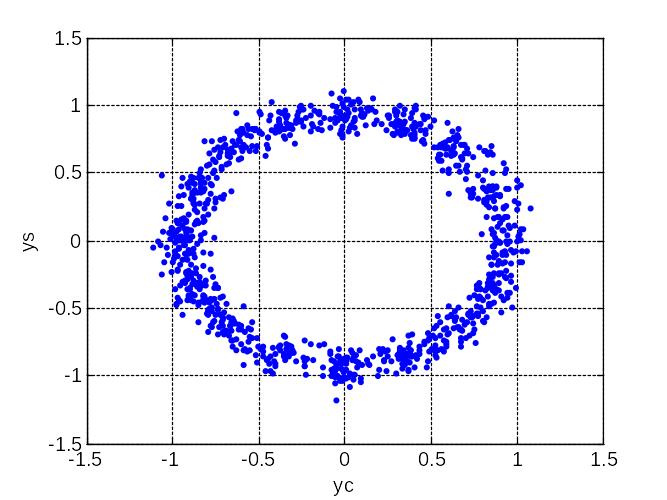
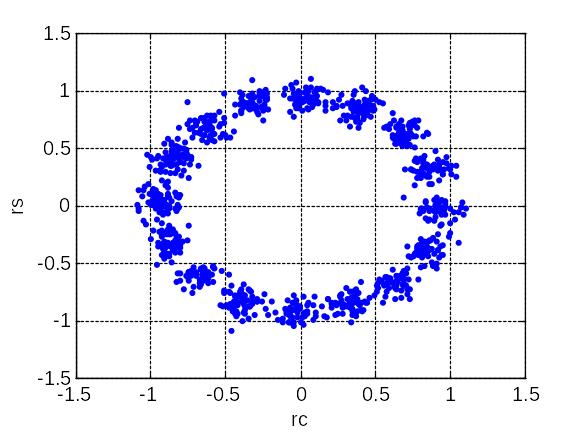
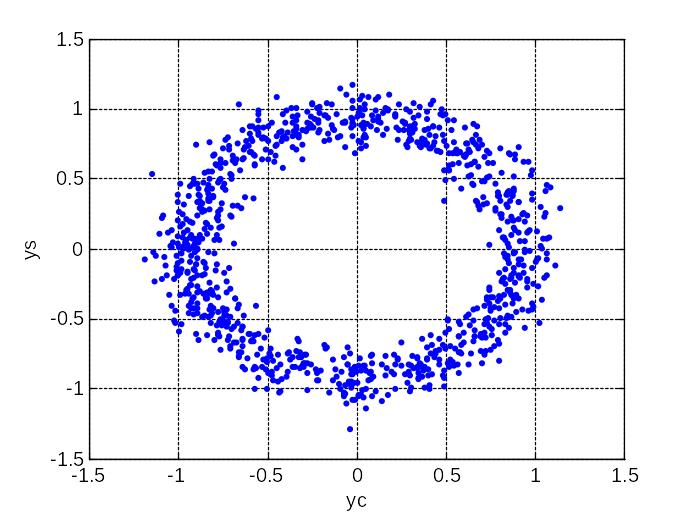
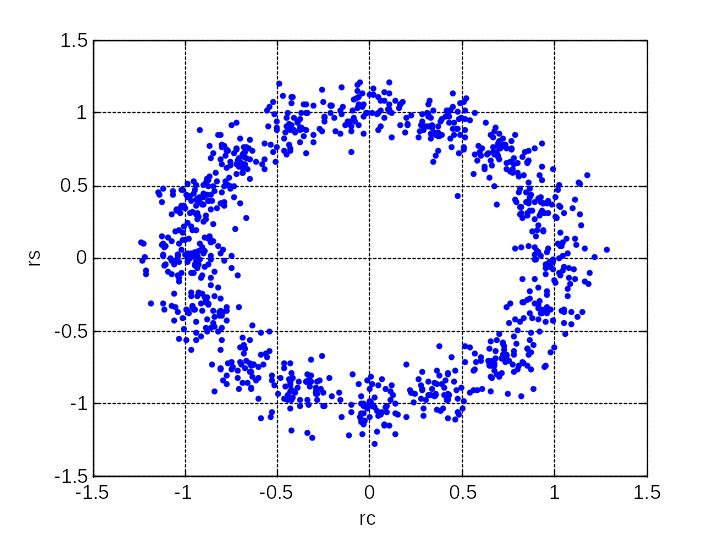
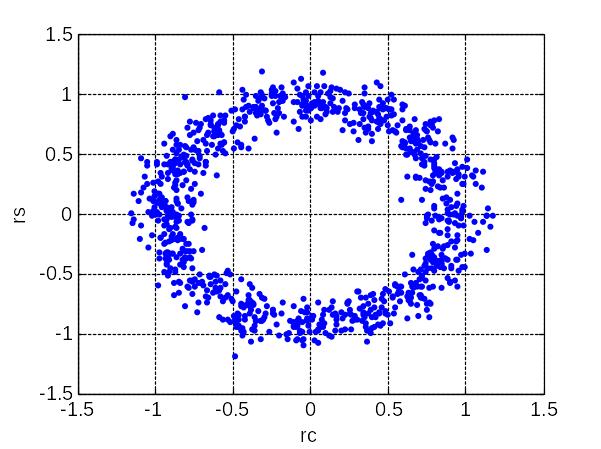
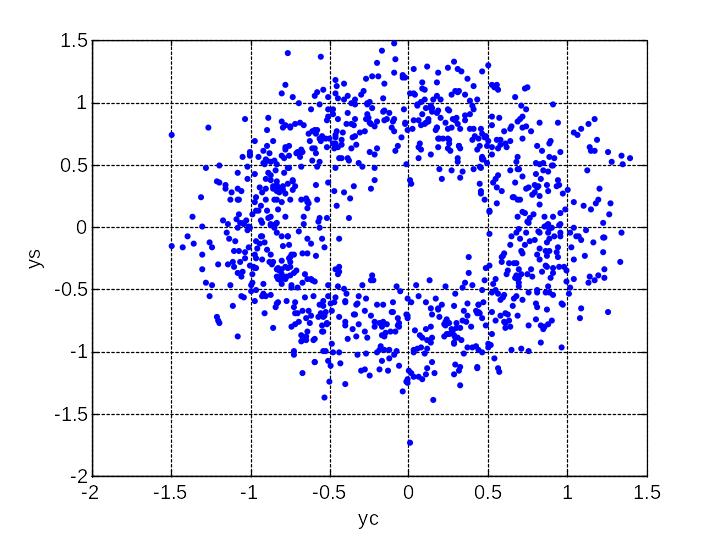
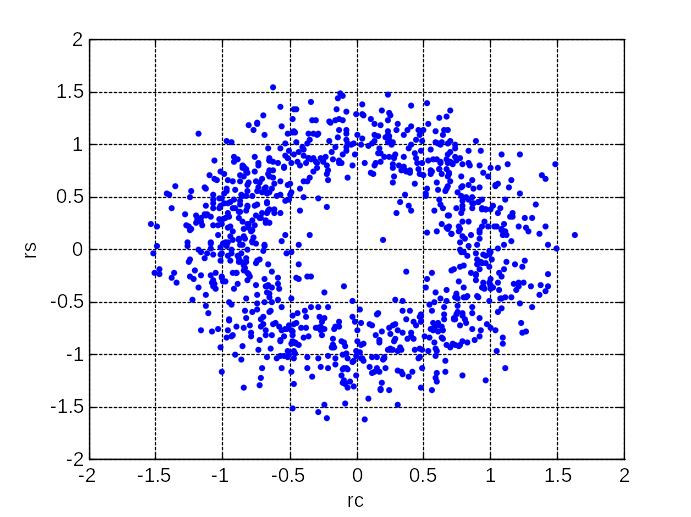
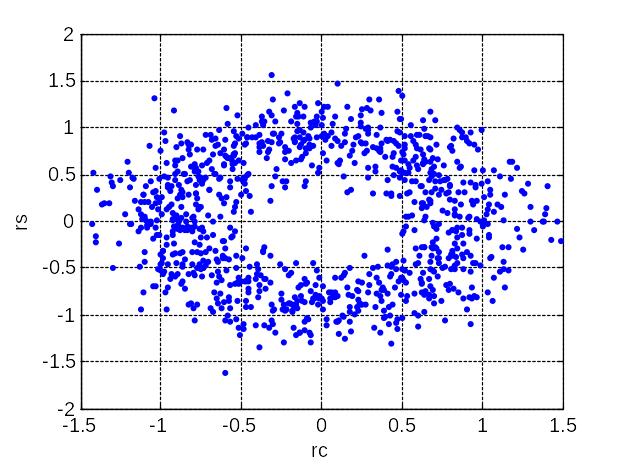
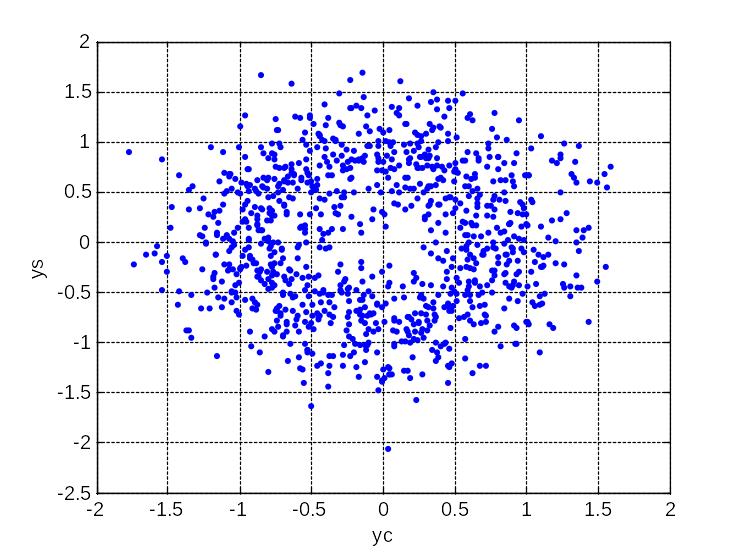
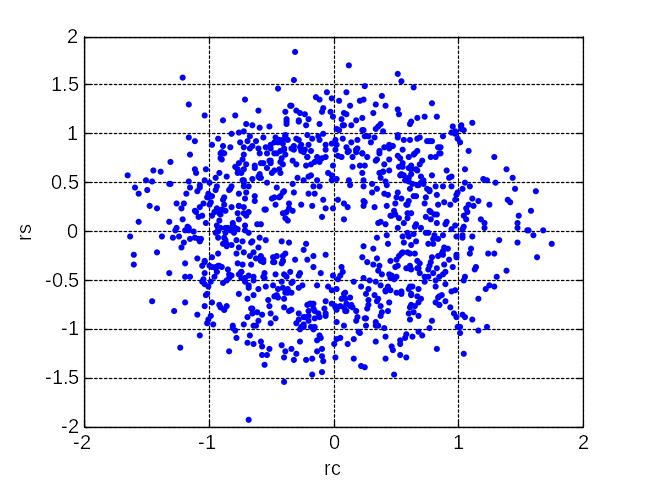
Ниже на рисунках показан сигнал после демодуляции и после процедур фазовой и тактовой синхронизации (а - для идеальной синхронизации, б- для синхронизации, работающей с ошибкой).
q=31дб
а б


q=21дб
а б

q=14дб
а б

q=11дб
а б
q=4дб
а б
q=1дб
а б

Литература.
1.Волчков В.П. Основы построения цифровых систем связи. Учебное пособие. МТУСИ. М: 2005.
2.Прокис Дж. Цифровая связь. М: Радио и связь, 2000.