

1.1. Классификация электроприводов летательных аппаратов
В настоящее время на ЛА насчитывается от нескольких десятков до нескольких сотен электроприводов, различающихся функциональным назначением, структурой, конструктивным и схемным исполнениями. Многообразие ЭП позволяет провести их классификацию, в основу которой могут быть заложены характерные признаки, наиболее важные при сравнении этих технических устройств [1]. Применяемые на борту электроприводы, как правило, классифицируют по следующим признакам:
1) типу электромеханического преобразования;
2) решаемым задачам;
3) типу основных функций;
4) назначению;
5) роду тока;
6) типу электромеханического преобразователя;
7) кинематике и скорости движения исполнительного механизма;
8) направлению вращения;
9) принципу (характеру) движения;
10) типу передаточных устройств;
11) характеру нагрузки;
12) количеству исполнительных механизмов, приходящихся на один электромеханический преобразователь;
13) характеру изменения параметров; способу управления; задачам регулирования; наличию обратной связи; режиму работы.
Как отмечалось выше, в качестве электромеханического преобразователя в электроприводах ЛА используют электродвигатели и электромагниты. В соответствии с этим различают привод электродвигательный и электромагнитный.
Электромагнитный привод используют в тех случаях, когда исполнительный механизм имеет прямолинейный ход с малым перемещением или требуется обеспечить поворот на небольшой угол без преодоления больших усилий. Кроме того, подобный привод применяется в исполнительных устройствах, требующих мгновенного срабатывания и работающих по принципу «включено-выключено» (механизмы полного открытия или закрытия – замки, защелки, краны, тормоза и т.п.).
Электродвигательный привод выбирают, когда приводимый агрегат имеет вращательное движение, относительно большой ход, требует реверсирования или значительных тяговых усилий. По сравнению с электромагнитным использование электродвигательного привода на борту Л А гораздо шире.
По решаемым задачам различают электропривод, обеспечивающий функционирование ЛА (запуск авиационного двигателя, перекачку топлива, управление полетом, ориентацию солнечных батарей и т.п.) и привод, применяемый в составе научно-исследовательской и служебной аппаратуры (телескопах, гиростабилизированных платформах, сканирующих механизмах и т.п.), а также в различных сервисных устройствах (вентиляторах, транспортерах, лебедках, системах телеметрии, записи и воспроизведения информации и т.п.).
По типу основных функций ЭП его определяют как привод для обеспечения:
• пуска, торможения и реверсирования механизма;
• регулирования частоты вращения в требуемом диапазоне;
• постоянства заданных частоты вращения, момента и мощности в статических и динамических режимах;
• заданного угла поворота в функции входного сигнала;
• функционирования с заданной точностью механизма, выступающего в роли датчика первичной информации в системе более сложной иерархии, например гироскопический привод в навигационных системах.
В зависимости от назначения различают основной (силовой) ЭП, выполняющий основную функцию данного электрифицированного исполнительного агрегата, и меньший по мощности вспомогательный ЭП, осуществляющий вспомогательную функцию в электрифицированном исполнительном агрегате. При этом если питание электромеханического преобразователя осуществляется постоянным или переменным током, привод соответственно считается электроприводом постоянного или переменного тока.
Важную роль в решении тех или иных приводческих задач играет тип электромеханического преобразователя. В качестве такого преобразователя в электромагнитных приводах используют электромагниты постоянного тока (значительно реже переменного тока) и поляризованные электромагниты. В электродвигательных приводах постоянного тока широкое распространение получили коллекторные электродвигатели параллельного, последовательного и смешанного возбуждения, а также коллекторные и вентильные электродвигатели с возбуждением от постоянных магнитов и вентилъно-индукторные электродвигатели.
В электродвигательных приводах переменного тока широко используют двухфазные и трехфазные асинхронные электродвигатели, а также синхронные (гистерезисные и шаговые) электромеханические преобразователи.
Исполнительные устройства электроприводов в зависимости от кинематики их движения делят на механизмы поступательного, углового (поворотного) и вращательного движения. В перечисленных устройствах основное звено механизма совершает соответственно:
1) ограниченное прямолинейное или криволинейное движение;
2) поворот на определенный угол;
3) вращательное движение с постоянной или переменной частотой вращения.
По частоте вращения (скорости движения) различают ЭП с тихоходными и быстроходными исполнительными механизмами, при этом к первой категории обычно относят устройства с ограниченными линейными или поворотными движениями основных звеньев (механизмы триммеров, рулевых поверхностей и т.п.), а ко второй – вращательного движения (вентиляторы, гироскопы и т.п.).
По направлению и характеру вращательного движения выходного вала электропривод может быть соответственно реверсивным и нереверсивным, непрерывного или дискретного действия. В первом случае выходной вал находится в непрерывном движении, а во втором – совершает дискретное (шаговое) перемещение. При этом в зависимости от того, есть или нет между двигателем и исполнительным механизмом промежуточное передаточное устройство – в общем случае трансмиссия (редуктор, ременная или цепная передача, вариатор, рейка и т.п.) или часть ее (чаще всего редуктор) различают привод редукторный или безредукторный. К преимуществам последнего относят:
1) большое значение отношения пускового момента к моменту инерции на выходном валу
2) жесткость соединения и компактность, высокое быстродействие и разрешающую способность из-за отсутствия неизбежных в редукторе люфтов и трения;
3) возможность установки электромеханического преобразовате-ля на одном валу и в общем корпусе с исполнительным механизмом.
Свойства электроприводов в значительной мере определяются характером нагрузок, имеющих разную физическую природу и действующих на вал исполнительного механизма. Основными из них являются:
1) аэродинамические силы и моменты, действующие на управляющие поверхности, находящиеся в воздушном потоке;
2) силы инерции;
3) гидродинамические силы, возникающие при работе гидронасосов, нагнетателей;
4) силы тяжести;
5) моменты сил, возникающие при вращении электромеханических генераторов, электромашинных преобразователей и т.п.;
6) силы сжатия газов;
7) силы и моменты различных видов сопротивления.
Отдельным механизмам могут быть присущи одновременно несколько из этих сил, однако всегда можно выделить одну или две основные силы, определяющие нагрузку механизма. Так, в механизме убирающегося шасси основными силами являются силы тяжести и аэродинамические силы; при раскрутке компрессора и ротора турбины реактивного двигателя во время запуска приходится преодолевать главным образом вентиляторный и инерционный моменты и т.д.
Перечисленные выше силы и их моменты создают два вида нагрузок на валу электродвигателя: динамические и статические.
Динамические нагрузки определяются силами инерции и возникают при ускорениях или замедлениях движения механизма, а также при изменении моментов инерции. Такие нагрузки могут быть определяющими в приводе гироскопов, инерционном приводе маховиков, используемых в механических аккумуляторах энергии или в качестве элементов стабилизации и регулирования пространственного положения космических аппаратов.
В отличие от них статические нагрузки не зависят от ускорения механизма и вызываются силами сопротивления, действующими на исполнительный механизм (аэродинамические силы, силы упругости, силы трения и т.п.).
По характеру действия на привод моменты разделяют на реактивные и потенциальные (активные). Реактивные моменты возникают в результате противодействия окружающей среды движению исполнительного механизма и всегда направлены против движения. К ним относят моменты трения и моменты сопротивления вентиляторов, насосов. Реактивные силы и моменты вызвать движение не могут и при неподвижном исполнительном механизме равны нулю.
Потенциальные моменты обусловлены запасом потенциальной энергии исполнительного механизма и зависят от положения исполнительного органа. Они могут вызвать движение, но не зависят от направления этого движения и значения угловой частоты вращения или линейной скорости перемещения. К ним относят моменты, создаваемые грузом лебедки, сжатыми (закрученными) пружинами, аэродинамические моменты, действующие на отклоняемые рулевые поверхности.
По характеру изменения статических нагрузок, зависящих от типа механизма, его кинематики и тех основных функций, которые они должны выполнять, авиационные исполнительные механизмы условно разделяют на следующие группы:
1. Механизмы с постоянным статическим моментом Мс = соnst, практически не зависящим от частоты вращения.
К числу таких механизмов могут быть отнесены лебедки, служащие для подъема грузов неизменной массы, подвески бомб, шестеренчатые гидронасосы. Типовая зависимость угловой скорости вала механизма Ω от момента показана на рис. 1.2, а.
2. Механизмы с постоянным статическим моментом Мс = соnst, зависящим от направления вращения (движения). Так, например, изменяется (рис. 1.2, б) момент сухого трения исполнительного механизма, который всегда направлен против движения.
3. Механизмы, статический момент которых зависит от угловой скорости Мс =f (Ω) . Линейно от угловой частоты вращения зависит момент вязкого трения (кривая 1, рис. 1.2, в). Часто момент Мс нелинейно возрастает при увеличении Ω, в общем случае имея постоянную составляющую Мсо – момент сухого трения, который в ряде механизмов, например гироскопах с аэродинамическими опорами, может быть значительным на низкой частоте вращения, а затем по мере «всплытия» опоры резко уменьшаться:
Мс = Мсо + сΩn,
где с – коэффициент пропорциональности.
Для ряда исполнительных механизмов показатель п близок к 2, а Мсо = 0. Такие характеристики получили наименование «вентиляторных», так как характерны для вентиляторов, компрессоров авиационных двигателей и центробежных насосов (кривая 2, рис. 1.2, в).
Уменьшение момента Мс при увеличении ω характерно для исполнительных механизмов, потребляемая мощность которых постоянна при изменении ω (кривая 3, рис. 1.2, в). Такая зависимость характерна, например, для генераторов электромашинных преобразователей, работающих с регулятором напряжения.

а б в г
Рис. 1.2. Характеристики типовых статических нагрузок авиационных электродвигательных агрегатов и электромеханизмов
4. Механизмы, статические моменты или силы сопротивления которых зависят от перемещения l, т.е. от пути или угла поворота α, характеризующих положение подвижных частей механизма:
Мс=f(l), Мс=f(α).
Этот вид нагрузки характерен, например, для авиационных механизмов, используемых для подъема и выпуска шасси, перезарядки пушек, перемещения рулей, элеронов, триммеров, стабилизаторов. Типовая зависимость Мс = f(α) для механизма выпуска и подъема шасси показана на рис. 1.2, г.
5. Механизмы, статические моменты сопротивления которых зависят одновременно от угла поворота α и угловой скорости Ω или от перемещения l и линейной скорости v: Мс=f(α, Ω); Мс=f(l, v).
К этой группе механизмов относят, например, поршневые компрессоры и гироскопы с аэродинамическими опорами.
6. Исполнительные механизмы и рабочие машины, моменты сопротивления которых находятся в определенной зависимости от времени и других факторов: Мс=f(t, a, b, …n).
Сочетание переменного момента сопротивления, зависящего от скорости, положения агрегата и переменного приведенного момента инерции, представляет собой наиболее сложный случай. Оно характерно для манипуляторов и механизмов управления. Обеспечение при этом заданных динамических качеств регулирования представляет сложную техническую задачу.
Зависимости моментов или сил статического сопротивления от угла поворота, угловой скорости перемещения, времени и пр. называются статическими характеристиками исполнительных механизмов.
Статические характеристики исполнительных механизмов могут существенно изменяться в зависимости от высоты полета и температуры окружающей среды. Так, при больших понижениях температуры увеличивается вязкость смазочных материалов, что вызывает изменение сил сопротивления.
Плотность воздуха зависит как от температуры, так и от давления, поэтому с подъемом на высоту изменяются аэродинамические силы, действующие на исполнительные механизмы. Эти факторы зависят от условий полета, изменяющихся с течением времени выполнения полетного задания.
По количеству исполнительных механизмов, приходящихся на один электромеханический преобразователь (электродвигатель) различают приводы одиночный (индивидуальный) и групповой. В индивидуальном электроприводе механизм приводится в движение с помощью отдельного электродвигателя, а в групповом – электродвигатель обеспечивает движение нескольких исполнительных органов определенного механизма или нескольких механизмов, например левую и правую части рулей высоты или элеронов, все лопасти винта, секции закрылков или предкрылков. Разновидностью группового электропривода является взаимосвязанный ЭП, содержащий два или несколько электрически или механически связанных между собой ЭП, работа которого должна быть реализована при заданном соотношении (в частности равенстве) частот вращения, нагрузок или положений исполнительных механизмов. Другой разновидностью группового электропровода является взаимосвязанный многодвигательный ЭП, содержащий несколько электродвигателей, работающих на общий вал. В тех случаях, когда возникает необходимость поддержания постоянного (или равного) соотношения частот вращения механизмов, не имеющих механических связей, используют структуру ЭП, называемую схемой электрического вала.
По характеру изменения параметров электропривод может быть нерегулируемым и регулируемым. В нерегулируемом ЭП его параметры [момент, частота вращения, (скорость перемещения), углов положение ротора, КПД, ток, мощность и т.п.] изменяются в результате возмущающих воздействий со стороны нагрузки или источника питания. В регулируемом ЭП параметры могут изменяться под действием управляющего воздействия. При этом достигается регулирование частоты вращения, требуемое качество переходных процессов, реализуется достижение предельных энергетических показателей, обеспечивается работа в условиях заданных ограничений и т.п.
Одна из задач регулируемого электропривода поддержание какого-либо параметра на заданном уровне. В зависимости от назначения агрегата число таких параметров может быть разным. Так, в лентопротяжных механизмах требуется стабилизация одного параметра – частоты вращения, а для механизмов гироскопа необходима стабилизация целого ряда параметров: момента, частоты вращения, положения ротора, тока и тепловых параметров двигателя.
В зависимости от способа управления электроприводы подразделяют на ЭП с ручным, полуавтоматическим или автоматическим управлением.
Ручное и полуавтоматическое управление, как правило, применяется к нерегулируемому ЭП, предполагая наличие оператора (одного из членов экипажа) и используется, главным образом, в тех случаях, когда вся аппаратура управления может быть компактно сосредоточена на пульте, и когда само управление ограничено небольшим количеством простых операций (пуск, останов, реверсирование). Эта группа авиационного ЭП по конструктивному исполнению может быть разделена на электродвигательные агрегаты и электромеханизмы. Автоматическое управление обеспечивает более точное выполнение отдельных операций и высокое быстродействие, освобождая при этом членов экипажа от управления, контроля и наблюдения за ходом всех процессов. При этом способе управления функции оператора выполняют задатчики управления или задающие устройства.
В зависимости от режима работы, который определяется задачами регулирования, автоматический ЭП может быть параметрическим, программно-управляемым, следящим, позиционным и адаптивным.
Параметрический привод включается и отключается под действием управляющего сигнала, подаваемого при достижении на контролируемом объекте заданного предельного значения параметра. Примерами такого привода могут служить привод вентилятора, начинающего работать при повышении температуры агрегата сверх допустимой или привод открытия электромагнитного крана нейтрального газа в системе пожаротушения при достижении предельного значения температуры в мотогондоле двигателя.
В программном электроприводе работа электромеханического преобразователя происходит по заданной заранее программе. В таком режиме работает привод аэрофотоаппарата, позволяющий автоматически фотографировать местность через заданные интервалы времени, привод топливных насосов в системе программной выработки топлива или привод в системе электрического запуска авиадвигателя – программа его работы подчиняется требуемому закону запуска: последовательности наращивания усилий и включения агрегатов запуска.
Следящий электропривод не имеет заранее заданной программы работы и отрабатывает перемещение исполнительного органа в соответствии с произвольно меняющимся задающим сигналом. Примером такого привода могут служить приводы рулевых поверхностей, механизации крыла, пушечной турели, антенн, регуляторов силовой установки, приборных указателей, систем ориентации солнечных батарей и т.п.
По способу формирования сигнала управления следящие системы (СС) подразделяют на управляемые по отклонению, возмущению и комбинированные. Достоинством первых является простота, независимость процесса слежения от вида и места приложения возмущений, достоинством вторых – возможность устранения возмущений на входе в систему.
Сложности, связанные с необходимостью измерения возмущений, являются недостатком этого способа управления и ограничивают применение таких систем. Наибольшие точность и быстродействие обеспечиваются в комбинированных системах, где основные возмущения компенсируются на входе, а оставшиеся отклонения устраняются контуром, реагирующим на отклонение регулируемой величины.
В основу классификации СС по регулируемым параметрам положена зависимость углового положения выходного вала от сигнала управления. Если эта зависимость пропорциональная, то такие системы называют позиционными. Там, где характер рабочего процесса не позволяет осуществить непосредственное слежение за угловым положением исполнительного механизма, используют управление по угловой частоте вращения. Подобные ЭП относят к скоростным (интегрирующим).
В зависимости от вида силовой части исполнительного механизма различают следящие приводы:
1) с регулируемыми электродвигателями постоянного и переменного тока (редукторные и безредукторные);
2) с электромагнитными муфтами в сочетании с нерегулируемыми электродвигателями;
3) с вариаторами скорости в сочетании с нерегулируемыми электродвигателями;
4) электрогидравлические с нерегулируемым электродвигателем и гидроприводом.
Следящие системы по характеру управления делят на СС с непрерывным и дискретным управлением. Последние, в свою очередь, по виду обрабатываемой информации подразделяют на импульсные (различающиеся еще и по виду модуляции), релейные и цифровые. По способу связи с бортовой ЦВМ различают автономные и неавтономные цифровые СС. В автономных приводах ЦВМ является источником входной информации, а вычислительное устройство осуществляет функции цифровой коррекции. В неавтономном приводе ЦВМ выполняет функции задающего устройства, элемента управления и цифрового корректирующего устройства [1].
Характерной особенностью адаптивного электропривода является возможность автоматического изменения его структуры при изменении условий работы. Подобные системы автоматического управления появились для решения задач оптимизации процессом управления объектом в условиях неполной априорной информации об этом объекте. В частности, они эффективны в тех случаях, когда имеет место изменение в широком диапазоне внешних или внутренних воздействий на систему управления, а также характеристик самого объекта. При этом изменению подлежат как параметры устройства управления (адаптивная самонастраивающаяся система), так и структура устройства управления (самоорганизующаяся адаптивная система).
Все многообразие типов электроприводов ЛА в зависимости от наличия в структурной схеме ЭП обратной связи (ОС) можно разделить на системы разомкнутого и замкнутого электропривода. Вне зависимости от вида управляющего устройства УУ, усилителя-преобразователя У-П, электродвигателя-преобразователя ЭД-П, в состав которого помимо электродвигателя входит механический преобразователь, отличительной особенностью разомкнутых структурных схем ЭП является отсутствие обратной связи между регулируемой или управляемой величиной y(t) управляющим воздействием g(t) (рис. 1.3, а). Это приводит к тому, что измерения и контроля истинного значения регулируемой величины не происходит и влияние возмущающих воздействий по частоте Δf, напряжению ΔU, температуре ΔT, моментам сопротивления ΔМc и нагрузки ΔМН не корректируется.

а

б
Рис. 1.3. Структурные схемы разомкнутой (а) и замкнутой (б) систем электропривода
Электроприводы, выполненные на базе разомкнутых структур, составляют достаточно большую группу и используются, например, в механизации крыла, тормозных устройствах, посадочных фарах, погрузочно-разгрузочных механизмах и т.п.
В системах с замкнутым управлением регулирование осуществляется с использованием информации о фактическом значении регулируемой величины у(t) путем введения обратной связи по этой величине (рис. 1.3, б).
Контроль за изменением возмущающих воздействий при этом не производится, а их влияние компенсируется посредством канала обратной связи. Такой способ управления обычно называют управлением по отклонению, а обратную связь по регулируемой величине – главной отрицательной обратной связью. Качество и точность регулирования в такой системе выше, чем в разомкнутой системе.
Структурная схема замкнутой системы в дополнение к тому, что показано на рис. 1.3, а содержит блок сравнения БС и контур главной обратной связи ГОС, по которому на блок сравнения с соответствующего датчика поступает сигнал о текущем значении регулируемой величины. На схеме рис. 1.3 этот сигнал формируется датчиком угла ДУ и пропорционален углу поворота ӨВЫХ исполнительного механизма. Для улучшения качества управления упрощения связи между регулируемыми параметрами могут быть использованы жесткие и гибкие связи, образующие внутренний контур регулирования ВКР, который сам по себе не характерна замкнутость системы, а выполняет вспомогательные функции.
В комбинированной системе к одной из рассмотренных выше систем добавляется разомкнутые структура по каналу информации об основном возмущающем воздействии, например изменении момента нагрузки ΔМН. Такой сигнал вводит через промежуточный преобразователь ПП на блок сравнения (штриховая линия на рис. 1.3, б), где суммируется с первичным сигналом g(t) в канале управления. В результате в регулирующем воздействии х(t) постоянно присутствует составляющая, которая компенсирует влияние возмущения, позволяет осуществлять независимое регулирование от основного возмущающего фактора. К числу таких приводов относят ЭП с автоматическим регулированием частоты вращения и следящие привода. Использование в подобных структурах воздействия не только по отклонению регулируемой величины, но и по возмущению и нагрузкам позволяет во многих случаях значительно повысить качество регулирования и быстродействие электропривода.
На основе рассмотренного выше автоматической системы управления ЭП можно разделить на разомкнутые системы, осуществляющие параметрическое регулирование выходной величины без оптимизации процессов регулирования, разомкнутые системы с оптимизацией, замкнутые системы с регулированием по основному параметру управления.
К разомкнутым системам управления без оптимизации процессов регулирования относят ЭП с простейшими операциями пуска и останова, выполняемыми по дискретным командам g(t), поступающим на преобразующий элемент, в качестве которого чаще всего используют силовой переключатель. Точность отработки сигнала g(t) в этом случае будет зависеть исключительно от характеристик электродвигателя и системы его питания. В ряде случаев в такой системе может быть предусмотрено программное изменение регулирующих параметров питания или собственно электромеханического преобразователя (поток, число пар полюсов и т.п.).
В разомкнутой системе управления с оптимизацией могут быть использованы внутренние обратные связи чаще всего по электромагнитным параметрам (ток, напряжение, поток и т.д.), что позволит формировать требуемый вид механической характеристики (обеспечивающей, например, заданное быстродействие), ограничивать перегрузочную способность электродвигателя по моменту, току и т.д. Уровень установившегося сигнала управления в такой системе определяется, как и в предыдущей схеме, сигналом задания с учетом изменения передаточных функций элементов системы, охваченных обратной связью.
К замкнутым системам с регулированием по основному параметру управления относят системы, замкнутые по этому параметру, – угловой скорости Ω, ускорению dΩ/dt, угловому положению φ, моменту М. При этом, в электронных преобразователях для обеспечения их надежной и эффективной работы используют обратные связи по току в силовой части, напряжению шины постоянного тока, напряжению вторичных источников электропитания, температуре преобразователя и электродвигателя. Не все из вышеназванных контролируемых параметров могут быть получены непосредственно с датчиков соответствующих величин. Например, ввиду сложности получения электрического сигнала, пропорционального величине вращающего момента М, в ЭлП используют обратную связь (ОС) по величине, пропорциональной моменту. Такой величиной для большинства электродвигателей является потребляемый ток. Сигнал ОС по ускорению dΩ/dt, как правило, получается расчетным путем при наличии сигнала датчика угловой скорости Ω.
Применение тех или иных ОС определяется функциональным назначением ЭП. В нерегулируемом электроприводе (этим типом оснащено подавляющее число авиационных электромеханизмов), где не требуется формирование электромеханических характеристик ЭД в процессе движения, необходима лишь ОС по току для обеспечения требуемого пускового момента и защиты силовых транзисторных ключей. В нереверсивных регулируемых ЭП (привод топливных и масляных насосов, вентиляторов, компрессоров и т.д.) диапазон регулирования угловой скорости не превышает 1:5 и для формирования требуемых характеристик, как правило, достаточно датчиков обратных связей по угловой скорости Ω и току i.
Одним из наиболее сложных типов электропривода, к которому предъявляют повышенные требования по быстродействию, точности и глубине регулирования параметров движения является следящий ЭП. В таких ЭП предусматриваются ОС по угловой скорости Ω, ускорению dΩ/dt, моменту нагрузки М, углу поворота φ, а для обеспечения требуемых законов регулирования и защит – по току i и напряжению и. Несмотря на большое разнообразие электроприводов ЛА, их режимы работы в зависимости от теплового состояния можно разбить на три основных вида: продолжительный, кратковременный и повторно-кратковременный.
В продолжительном режиме (рис. 1.4, а) работа ЭП происходит непрерывно в течение времени, достаточного для того, чтобы электродвигатель или электромагнит, а также отдельные элементы аппаратуры управления практически успели нагреться до установившейся температуры перегрева ту определяемой потерями и условиями охлаждения.
Продолжительный режим работы электромеханического преобразователя может сопровождаться переменными циклограммами потребления энергии. Для привода регистрирующих устройств, например устройств магнитной записи и воспроизведения, характерным является работа в течение длительного времени с малой частотой вращения в режиме накопления информации и работа с большой частотой в режиме передачи информации. Примерный график потребления энергии и изменения температуры для этого случая приведен на рис. 1.4, б.


а б в


г д
Рис. 1.4. Графики температуры перегрева т и мощности Р при работе электродвигателя в режимах: длительном с постоянной (а) и переменными одно-полярными (б) и разнополярными циклограммами потребляемой мощности (в); кратковременном (г) и повторно-кратковременном (д)
Для механизма типа «гироаккумулятор» характерен длительный режим потребления энергии с последующей импульсной ее отдачей в сеть другим потребителям (рис. 1.4, в).
Кратковременный режим (рис. 1.4, г) характеризуется тем, что длительность работы ЭП настолько мала, что электромеханический преобразователь, а также элементы аппаратуры за время включения не успевают нагреться до установившейся температуры перегрева. За период паузы температура их практически успевает снизиться до температуры окружающей среды. В кратковременном режиме работают, например, электромагнитные замки бомбодержателей, которые включаются только во время сбрасывания бомб, а также электродвигатели, приводящие в движение механизмы шасси, посадочных щитков, стабилизаторов, выдвижных фар и т.п.
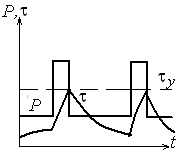
Особенности работы ЭП в повторно-кратковременном режиме (рис. 1.4, д) заключаются в том, что кратковременные периоды работы с временем включения tВКЛ чередуются с кратковременными периодами останова (паузы) или промежутками времени работы без нагрузки, равными tВЫКЛ, причем температура электродвигателя или электромагнита перед каждым повторным включением не успевает снизиться до исходной, соответствующей началу работы.
Благодаря этому температура электромеханического преобразователя постепенно увеличивается. На самолетах в повторно-кратковременном режиме работают механизмы жалюзи водяных радиаторов, створок капотов, триммеров руля высоты, лопастей винтов изменяемого шага, пулеметных и пушечных турелей, электромеханизмы кранов, заслонок, рулевых поверхностей и т.п. Длительность работы отдельных кратковременно действующих механизмов составляет от нескольких секунд до 1-2 минут. По принятым нормам продолжительность цикла повторно-кратковременного режима не должна превышать 10 мин.