

27. Экономические и социальные аспекты мехатроники
М ехатронный
подход в построении машин нового
поколения заключается в переносе
функциональной нагрузки от механических
узлов к интеллектуальным (электронным,
компьютерным и информационным)
компонентам, которые легко перепрограммируются
под новую задачу и при этом являются
относительно дешевыми. (рис.27.1).
ехатронный
подход в построении машин нового
поколения заключается в переносе
функциональной нагрузки от механических
узлов к интеллектуальным (электронным,
компьютерным и информационным)
компонентам, которые легко перепрограммируются
под новую задачу и при этом являются
относительно дешевыми. (рис.27.1).
Рис. 27.1. Динамика переноса функциональной нагрузки от механических узлов к интеллектуальным
Из рис.27.1 видно, что с 1990 года происходит постепенное вытеснение механических узлов – сначала электронными, а затем и компьютерными блоками. Вместе с тем тенденция перехода от механических к мехатронным технологиям в современном машиностроении не «закрывает» механику. Системный подход диктует новые требования к встроенным механическим и гибридным компонентам, что в свою очередь ведет к развитию новых технологий и конструкторских решений в области механики.
Для создания машин нового поколения необходимы принципиально новые подходы к конструированию и производству приводных модулей и систем.
К функциональным характеристикам приводной техники для технологических машин можно предъявить следующие требования:
- сверхвысокие скорости движения рабочих органов машин, которые определяют новый уровень производительности технологических комплексов;
- сверхвысокая точность движений, необходимую для реализации прецизионных технологий (вплоть до микро- и наноперемещений);
- максимальную компактность конструкций и минимизацию массогабаритных показателей модулей (вплоть до миниатюризации в микросхемах);
- интеллектуальное поведение машин, функционирующих в изменяющихся и неопределенных внешних средах;
- реализацию быстрых и точных перемещений рабочих органов по сложным контурам и поверхностям;
- существенное расширение технологических и функциональных возможностей оборудования, желательно без увеличения его цены;
- способность системы к реконфигурации в зависимости от выполняемой конкретной задачи или операции;
- высокую надежность и безопасность функционирования.
Добиться качественно новых характеристик позволяет мехатронная концепция «встроенного проектирования», которая предполагает конструктивное объединение элементов системы в единый модуль.
Высокая точность, предельное быстродействие сложные законы перемещения выходного звена в пространстве и во времени – определяются технологической постановкой задачи управления.
Синергетическая интеграция при проектировании мехатронных модулей основана на трех базовых принципах:
- реализации заданных функциональных преобразований минимально возможным числом структурных и элементов в единые многофункциональные модули;
- выборе интерфейсов в качестве локальных точек интеграции и исключение избыточных структурных блоков и интерфейсов как сепаратных элементов;
- перераспределение функциональной нагрузки в мехатронной системе от аппаратных блоков к интеллектуальным (электронным и компьютерным) компонентам.
Практическая реализация принципов синергетической интеграции при проектировании позволяет обеспечить основные преимущества мехатронных систем по сравнению с традиционными машинами и добиться качественно новых показателей, в первую очередь по компактности конструкции, скорости и точности движении.
Интеграция предполагает не только аппаратное объединение элементов, но и организацию интегрированных информационных процессов в интеллектуальных модулях.
Синергетическую интеграцию в мехатронике осуществляют при проектировании двумя основными способами – это функционально-структурная интеграция и структурно-конструктивная интеграция, которые объединяют в общий алгоритм проектирования мехатронных систем.
Сложность и противоречивость требований, предъявляемых к мехатронным модулям движения, обусловливает целесообразность мехатронного подхода к их проектированию.
В частности, следование принципу синергетической интеграции элементов системы приводит к обеспечению желаемого уровня качества модуля за счет конструктивного и функционального взаимопроникновения его компонентов, многие из которых являются специализированными и создаются в ходе параллельного системного проектирования с учетом их последующего эффективного объединения. Это хорошо видно из рис. 27.2, на котором представлена классификация мехатронных модулей.
Если преобладающим является требование обеспечения компактности мехатронного модуля движения, то оно может быть реализовано путем использования бесконтактных электрических машин и их интеграции с преобразователями движения и информационно-измерительными элементами.
При этом преобразователи движения и датчики не являются отдельными устройствами, и становятся неотъемлемыми элементами двигателя.
Синергетический эффект достигается также за счет выполнения некоторыми компонентами мехатронного модуля движения нескольких функций одновременно. Такие решения позволяют исключить многие механические интерфейсы, упростить и удешевить конструкцию, устранить необходимость механической подгонки и согласования датчика и двигателя.
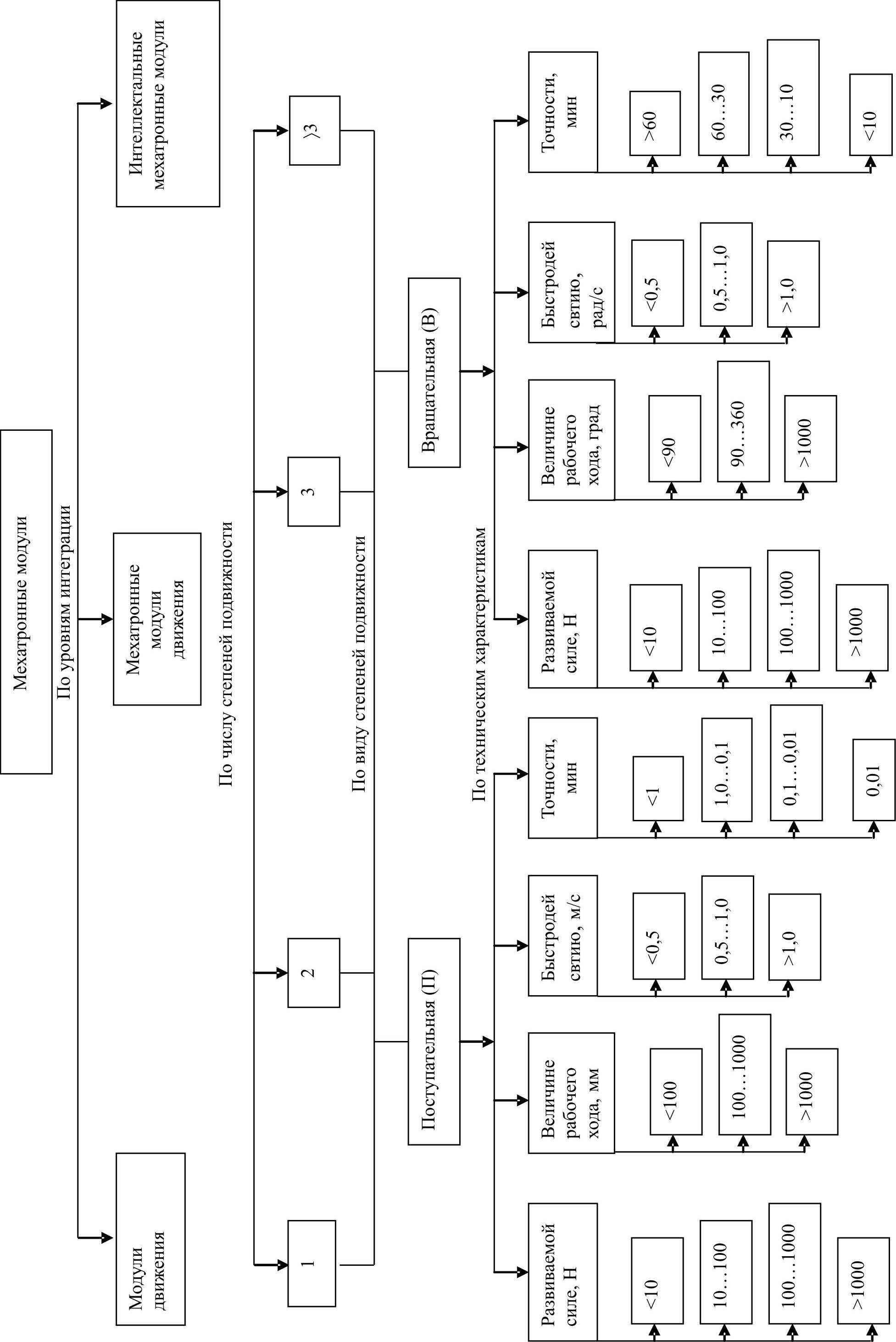
Рис. 27.2. Классификация мехатронных модулей
Использование современных информационных систем кардинально изменило нашу жизнь, но мы редко задумываемся о том, насколько мы стали зависимыми от них. Сегодня индустрия информационных систем является самой неэффективной из всех видов технологической деятельности человека, а инвестиции в нее самыми рискованными. Альтернатива развитию индустрии программного обеспечения пока неизвестна. В современном мире усложнение технических объектов происходит за счет наращивания их «интеллектуального компонента»- встроенного программного обеспечения. При этом конструкция исполнительных механизмов зачастую существенно упрощается. Это упрощение становится возможным за счет изменения архитектуры мехатронной системы путем разделения ее энергетических и информационных потоков. Хотя всякая машина предназначена для передачи и трансформации энергии и информации, традиционное архитектурное решение в конструкции, основано на встраивании информационных потоков в потоки энергетические. Платой за новые перспективы и энергосбережение в мехатронных системах является наличие встроенного программного обеспечения, так называемого интеллектуального компонента. Но если уж мы вынуждены встроить в систему процессор, то почему бы не загрузить его как можно больше - сделать эту систему еще более умной, например, заставить ее заниматься еще и диагностикой своих подсистем? Искушение усложнить программное обеспечение системы огромно и, как правило, непреодолимо. Стремление к чрезмерной интеллектуализации мехатронной системы приводит к усложнению ее программного обеспечения, а значит, и росту затрат, заодно к изменению структуры цены. Затраты на проектирование становятся несравненно меньше затрат на разработку программного обеспечения.
Кроме того, по данным Вашингтонского института исследований в области программной инженерии, только 12% всех программных проектов заканчивается в срок, укладываются в бюджет и удовлетворяют всем требованиям заказчика. В то же время 74% программных проектов сворачиваются либо ввиду срыва графика работ, либо перерасхода бюджета, либо невозможности удовлетворить требования заказчика. Для инвестора это означает, что шанс успеха при вложении в программную индустрию составляет один к шести.
Компьютерные мехатронные системы лучше проявляют себя при работе с установившимися процессами, а не переходными. Основная проблема как интеллектуальных мехатронных систем, так и информационных систем в целом заключается в том, что они работают во взаимодействии с человеком – самым ненадежным и непредсказуемым с точки зрения обработки информации компонентом системы.
ЛИТЕРАТУРА
МакКаллоу У. С., Питтс В. Логическое исчисление идей, относящихся к нервной активности // Нейрокомпьютер.—1992.—№ 3, 4.—С. 40—53.
Widrow B., Hoff M. E. Adaptive switching circuits // 1960 IRE WESCON Convention Record. Part 4.—New York: IRE, 1960.—P. 96—104.
Минский М., Пайперт С. Персептроны.— М.: Мир, 1971.
Kohonen T. Self-Organization and Associative Memory.—Berlin: Springer, 1987.
Parallel Distributed Processing: Explorations in the Microstructure of Cognition.
Vol. 1 / Rumelhart D. E., McClelland J. L., eds.—Cambridge: MIT Press, 1986
И.М. Макаров, В.М. Лохин, С.В. Манько, М.П. Романов. Технологии обработки командной информации и управления поведением в интеллектуальных робототехнических системах. М.: "Информационные технологии" 2005. №7
Егоров О.Д., Подураев Ю.В. Конструирование мехатронных модулей: Учебник. - М.: ИЦ МГТУ "СТАНКИН", 2004
Подураев Ю.В., Кулешов В.С. Принципы построения и современные тенденции развития мехатронных систем // Мехатроника . 2000. №1. С.5
Подураев Ю.В. Основы мехатроники. М.: Изд. - МГТУ СТАНКИН , 1999.
Богачев Ю .. Мехатроника - достижения и проблемы. М.: Приводная техника, №4,1998.
Егоров О.Д. Точность манипуляционных механизмов роботов. Учебное пособие. М., МПИ, 1989 – 104с.
Введение в мехатронику. Учебное пособие / Под ред. А.К.Тугенгольда, 2-ое изд. Ростов-на-Дону: изд. Центр ДГТУ, 2002.
Казмиренко В.Ф. Электрогидравлические мехатронные модули движения. М., Радио и связь, 2001.
Крайнев А.Ф. Механика машин. Фундаментальный словарь. М., Машиностроение, 2000.
Статьи по мехатронным системам машин. Российский журнал «Мехатроника, автоматизация, управление», 2000-2008 годы. Москва.
15. Марпл С.Л. Цифровой спектральный анализ и его приложения: Пер. с англ. - М.: Мир, 1990.
16. Шермухамедов А.А., Лебедев О.В. САПР в машиностроении. Т.,Фан,2004,
с.112.