

17. Расчет и выбор параметров сглаживающего фильтра
Для снижения пульсации выпрямленного напряжения на выходе преобразователя-выпрямителя устанавливается сглаживающий фильтр. Эффективность сглаживающего фильтра оценивают по его способности уменьшать амплитуду пульсации, т.е. по значению коэффициента сглаживания qc.
17.1. Расчет коэффициента сглаживания
 (17.1)
(17.1)
где U'(1)m , U'д— амплитуда основной гармоники пульсаций и постоянная составляющая напряжения на входе фильтра U'(1)m= 183,66 В, U'д=274 В; , U''(1)m, Uд - амплитуда основной гармоники пульсаций и постоянная сглаживающая напряжения на выходе фильтра, U''(1)m = 1В, Uд = 274 .В.
17.2. Выбор схемы фильтра
В соответствии с рекомендациями выбираем Г-образный LC-фильтр. Определяем, произведение Lд • С
![]() (17.2)
(17.2)
где mn — частота пульсаций выпрямленного напряжения, mn = 100 Гц;
c=314,16рад/с
![]()
17.3. Определение минимального значения индуктивности дросселя
 Гн
Гн
По рассчитанному значению Lд..мин выбираем стандартный дроссель фильтра ДПМ 200-1000 со следующими параметрами:
индуктивность дросселя Lд, 10-6 Гн.... 1000
номинальный постоянный ток, А ....................200
17.4. Расчет емкости конденсатора фильтра
![]() (17.3)
(17.3)
17.5. Рабочее напряжение конденсатора
Рабочее напряжение конденсатора при проектировании выбирается больше значения выпрямленного напряжения из выражения
![]() В
(17.4)
В
(17.4)
По рассчитанному значению емкости С и рабочему напряжению выбираем конденсатор К50-78-450В — 220мкФ ± 20%.
18. Кинематическая погрешность цилиндрической зубчатой передачи
Точность работы мехатронного модуля оценивают его погрешностью, т.е. разностью между действительным и расчетным положениями выходного звена. Основными причинами возникновение погрешности мехатронного модуля являются погрешности систем управления и двигателя, кинематические погрешности, мертвые ход и упругие деформации элементов его преобразователей движения.[10]
Из-за наличия погрешностей изготовления зубчатых колес и сборки передачи угол 2 поворота ведомого колеса реальной зубчаток передачи отличается от угла поворота ведомого колеса идеального механизма при одном и том же значении угла , поворота ведущего зубчатого колеса (рис. 18.1):
![]() ,
(18.1)
,
(18.1)
где u12 - передаточное отношение от первого зубчатого колеса ко второму; - боковой зазор между зубьями ведущего и ведомого зубчатых колес; R2 - радиус ведомого зубчатаго колеса; 2 - погрешность положения ведомого колеса.
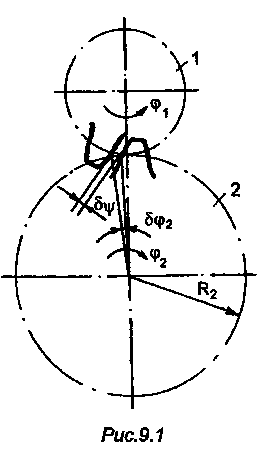
Рис. 18.1. Погрешности изготовления и сборки зубчаты колес
Алгебраическую разность между погрешностями положения ведомого колеса, вызванную погрешностями изготовления и сборки передачи, называют кинематической погрешностью передачи.
Кинематическую погрешность цилиндрической зубчатой передачи определяют методом максимума-минимума и вероятностным методом.
При расчете по методу максимума-минимума минимальное значение кинематической погрешности F{0min зубчатой цилиндрической передачи по дуге делительной окружности ведомого
![]() (18.2)
(18.2)
Максимальное значение кинематической погрешности, мкм:
![]() ,
(18.3)
,
(18.3)
где А - коэффициент, учитывающий степень точности передачи. . Для зубчатой передачи 7-й и 8-й степеней точности А=0,71, для остальных степеней точности А=0,62; Кs и К- коэффициенты фазовой компенсации, принимаемые в зависимости от передаточного отношения и по табл. 18.1; F`i - допуск, мкм, на кинематическую погрешность колеса:
![]()
Fр - допуск, мкм, на накопленную погрешность шага зубчатого колеса, ff - допуск на погрешность профиля зуба; ЕM — суммарная приведенная погрешность монтажа, мкм:
где = 20° — угол зацепления, град; - угол наклона линии зуба, град; er = Fr - монтажное радиальное биение зубчатого колеса, мкм:
![]()
еi - допуски на погрешности, создающие первичные радиальные биения колеса, мкм; еа - монтажное осевое биение зубчатого колеса, мкм:
![]()
ej — допуски на погрешности, создающие первичные осевые биения колеса, мкм.
В предварительных расчетах можно принимать еа=5...15 мкм.
Таблица 18.1
Значения коэффициентов фазовой компенсации для зубчатой передачи
и |
К |
Ks |
1,0...1,5 |
0,98 |
0,30 |
1.5...2.0 |
0,85 |
0,76 |
2,0...2,5 |
0,83 |
0,75 |
2.5...3.0 |
0,93 |
0,74 |
3,0...3,5 |
0,97 |
0,75 |
3,5...4,0 |
0,96 |
0,80 |
4,0..4…5 |
0,96 |
0,90 |
4.5...5.0 |
0,96 |
0,87 |
5Д..5.5 |
0,98 |
0,85 |
5.5...6.0 |
0,96 |
0,88 |
6Д.Д5 |
0,97 |
0,94 |
Св. 6,5 |
0,98 |
0,99 |
Примечание. Для передаточных отношений, не выражаемых целым в случае числом, работы передачи в пределах больше одного оборота колеса K=KS=0,98 |
||
При вероятностном
методе расчета максимальное значение
кинематической погрешности
![]() цилиндрической
зубчатой передачи, мкм:
цилиндрической
зубчатой передачи, мкм:
![]() ,
(18.4)
,
(18.4)
где Кр— вероятностный коэффициент фазовой компенсации, принимаемый в зависимости от передаточного отношения и и процента риска Р по табл. 18.2.
Таблица 18.2
Значения вероятностного коэффициента фазовой компенсации Кр для зубчатых передач
Р,% |
Передаточное отношение u |
|||||||||||
1,0... 1 5 |
1,5... 2,0 |
2,0... 2,5 |
2,5... 3,0 |
3,0... 3,5 |
3,5... 4,0 |
4,0... 4,5 |
4,5... 5,0 |
5,0... 5,5 |
5,5... 6,0 |
6,0... 6,5 |
Св. 6,5 |
|
32 |
0, 58 |
0,68 |
0,60 |
0,74 |
0,71 |
0,71 |
0,68 |
0,71 |
0,78 |
0,70 |
0,78 |
0,80 |
10 |
0, 92 |
0,78 |
0,73 |
0,88 |
0,82 |
0,82 |
0,80 |
0,82 |
0,90 |
0,88 |
0,91 |
0,94 |
4,5 |
0 ,95 |
0,83 |
0,81 |
0 91 |
0,92 |
0,91 |
0,88 |
0,92 |
0,94 |
0,94 |
0,94 |
0,96 |
1,0 |
0,96 |
0,84 |
0,82 |
0,92 |
0,95 |
0,95 |
0,94 |
0,95 |
0,97 |
0,95 |
0,96 |
0,96 |
Пересчет значений кинематической погрешности , выраженной в мкм, в угловые единицы-минуты, (...'), получим из пропорции
![]()
где d2 - диаметр делительной окружности ведомого зубчатого колеса, мм.
Откуда кинематическая погрешность 5ср цилиндрической зубчатой передачи в угловых единицах, (...'):
![]() (18.5)
(18.5)
Кинематическая погрешность цилиндрической зубчатой передачи в радианах, (рад):
 (18.6)
(18.6)