

12. Энергетический расчет универсального мехатронного модуля
12.1. Энергетический расчет универсального мехатронного модуля при незначительных динамических нагрузках
Рассмотрим методику расчета универсального мехатронного модуля при незначительных динамических нагрузках, когда силы инерции нагрузки значительно меньше внешних сил, действующих на ММ. В этом случае основными исходными данными являются:
структурная схема мехатронного модуля;
приложенная внешняя нагрузка МН (осевая сила Fн или вращающий момент Тн);
требуемая скорость rвых (линейная vвых или угловая wвых) выходного звена мехатронного модуля.
Для мехатронного модуля поступательного движения требуемую мощность электродвигателя, Вт, определяют по формуле:
![]() (12.1)
(12.1)
где Fн- усилие сопротивления на выходном звене мехатронного модуля, Н; vвых — линейная скорость выходного звена мехатронного модуля, м/с; — коэффициент полезного действия мехатронного модуля; Кдин = 1,1... 1,3 - коэффициент запаса, учитывающий влияние динамических нагрузок в период разгона и торможения.
Для мехатронного модуля вращательного движения требуемую мощность электродвигателя, Вт, определяют:
![]() (12.2)
(12.2)
или
![]()
где Fн — момент сопротивления на выходном звене мехатронного модуля, Нм; wвых — угловая скорость выходного звена мехатронного модуля, с-1; п - частота вращения выходного звена мехатронного модуля, об/мин.
Так как электродвигатели одной и той же мощности имеют разные номинальные вращающие моменты Tном, то необходимо определить требуемый момент двигателя, Нм:
![]() (12.3)
(12.3)
где и — передаточное отношение преобразователя движения (см. п.12.3).
Окончательно тип электродвигателя выбирают по каталогам исходя из условий:
![]()
Предварительный выбор вентильного бесконтактного моментного электродвигателя серии ДБМ осуществляют для мехатронного модуля без преобразователя движения по пусковому моменту Тп, равному статическому синхронизирующему моменту Тс (табл. 12.1), для мехатронного модуля с преобразователем движения по приведенной выше методике.
Таблица 12.1
Технические характеристики и геометрические параметры электродвигателей серии ДБМ
Тип двигателя |
Номинальный момент Тн, Нм |
Статический синхронизирующий момент Тс,Нм |
Частота вращения холостого хода nхх, об/мин
|
Пусковой ток фазы I,А |
Предельный ток обмотки статора Im A |
Момент инерции ротора ДдаХ10-3 КГМ2 |
Длина L, мм |
Диаметр корпуса D, мм |
Диаметр вала d, мм |
Масса m, кг |
Статор пазовый |
||||||||||
ДБМ50-0,04-2-2 |
0,04 |
0,080 |
2440 |
0,84 |
5 |
0,0055 |
30 |
50 |
12 |
0,2 |
ДБМ50-0,04-4-2 |
0,04 |
0,157 |
4880 |
3,25 |
10 |
0,0055 |
30 |
50 |
12 |
0,2 |
ДБМ70-0,16-1-2 |
0,16 |
0,39 |
987 |
1,62 |
10 |
0,07 |
34 |
70 |
23 |
0,35 |
ДБМ70-0,16-2-2 |
0,16 |
0,77 |
1975 |
6,38 |
20 |
0,07 |
34 |
70 |
23 |
0,35 |
ДБМ100-0,4-0,6-2 |
0,4 |
0,84 |
690 |
2,45 |
15 |
0,27 |
33 |
100 |
48 |
0,6 |
ДБМ100-0,4-1,2-2 |
0,4 |
1,67 |
1390 |
9,80 |
30 |
0,27 |
33 |
100 |
48 |
0,6 |
ДБМ120-1-0,2-2 |
1 |
1,19 |
240 |
1,25 |
12,5 |
1,0 |
42 |
120 |
60 |
1,3 |
ДБМ120-1-0,4-2 |
1 |
2,38 |
485 |
5,00 |
25 |
1,0 |
42 |
120 |
60 |
1,3 |
ДБМ120-1-0,8-2 |
1 |
4,47 |
970 |
18,00 |
50 |
1,0 |
42 |
120 |
60 |
1,3 |
ДБМ120-1,6-0,4-3 |
1,6 |
4,2 |
473 |
8,1 |
45 |
1,5 |
52 |
120 |
60 |
1,8 |
ДБМ150-4-0,3-2 |
4 |
6,7 |
323 |
9,6 |
60 |
3,0 |
55 |
150 |
72 |
3,0 |
ДБМ150-4-0,6-2 |
4 |
13,1 |
646 |
37,5 |
120 |
3,0 |
55 |
150 |
72 |
3,0 |
ДБМ150-4-1,5-3 |
4 |
47,3 |
1750 |
32,0 |
320 |
3,0 |
55 |
150 |
72 |
3,0 |
ДБМ 185-6-0,2-2 |
6 |
11,5 |
195 |
10,2 |
60 |
9,0 |
60 |
185 |
66 |
5,4 |
ДБМ 185-6-0,4-2 |
6 |
23,1 |
390 |
41,0 |
120 |
9,0 |
60 |
185 |
66 |
5,4 |
ДБМ185-16-0,15-2 |
16 |
28,0 |
143 |
18,4 |
110 |
15 |
85 |
185 |
66 |
9,2 |
ДБМ185-16-0,3-2 |
16 |
56,0 |
286 |
73,8 |
220 |
15 |
85 |
185 |
66 |
9,2 |
Статор гладкий |
||||||||||
ДБМ40-0,01-4,5-3 |
0,01 |
0,026 |
4570 |
0,48 |
1,25 |
0,0055 |
26 |
40 |
12 |
0,12 |
ДБМ40-0,01-9-3 |
0,01 |
0,051 |
9150 |
1,93 |
2,5 |
0,0055 |
26 |
40 |
12 |
0,12 |
ДБМ63-0,06-3-2 |
0,06 |
0,13 |
2950 |
1,63 |
10 |
0,07 |
28 |
63 |
23 |
0,32 |
ДБМ85-0,16-2-2 |
0,16 |
0,305 |
2040 |
2,70 |
20 |
0,27 |
36 |
85 |
48 |
0,54 |
ДБМ85-0,16-2-3 |
0,16 |
0,36 |
1900 |
2,70 |
7,5 |
0,27 |
36 |
85 |
48 |
0,54 |
ДБМ105-0,4-0,75-3 |
0,4 |
0,92 |
965 |
3,46 |
9,0 |
1,0 |
38 |
105 |
60 |
0,98 |
ДБМ105-0,6-1-2 |
0,6 |
1,62 |
917 |
6,30 |
30 |
1,5 |
46 |
105 |
60 |
1,3 |
ДБМ105-0.6-0.5-3 |
0,6 |
1,17 |
600 |
2,70 |
8,75 |
1,5 |
46 |
105 |
60 |
1 |
ДБМ130-1,6-0,5-2 |
1,6 |
1,74 |
457 |
3,37 |
40 |
3,0 |
54 |
130 |
72 |
2,5 |
Для мехатронных модулей, работающих в повторно-кратковременном режиме должна быть задана циклограмма нагружения (рис.12.1).
В этом случае учитывая, что время их разгона и торможения значительно меньше времени установившегося движения, можно определить значение требуемой среднеквадратичной статической мощности, приведенной к валу двигателя, Вт:
 (12.6)
(12.6)
где Рск — требуемая статическая мощность двигателя на К-м рабочем участке нагрузочной циклограммы двигателя, Вт.
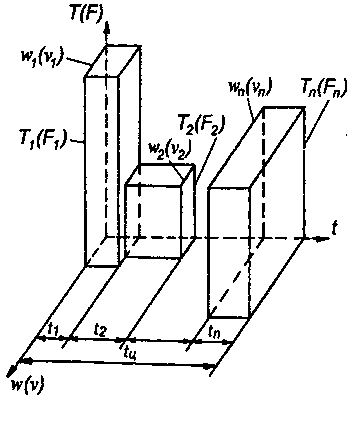
Рис. 12.1. Циклограмма нагружения
Для мехатронного модуля поступательного движения:
![]() ,
,
где FНК — сила сопротивления на К-м рабочем участке циклограммы, Н; vK- линейная скорость выходного звена мехатронного модуля на К-м рабочем участке циклограммы, м/с.
Для мехатронного модуля вращательного движения
![]() или
или
![]() ,
,
где Тнк — момент сопротивления на К-м рабочем участке циклограммы, Н-м; пк — частота вращения выходного звена мехатронного модуля на К-м рабочем участке циклограммы, об/мин; wк — угловая скорость выходного звена мехатронного модуля на К-и рабочем участке циклограммы, с-1; К - число включенных состояний двигателя за цикл; wH0M — номинальная скорость вращения вала двигателя, с-1; wPK- рабочая скорость вращения вала двигателя на К-и рабочем участке циклограммы, с1; tPK — длительность К-го рабочего участка циклограммы, с; Wk - коэффициент, учитывающий теплоотдачу при понижении скорости вращения двигателя по отношению к номинальной. Такое понижение скорости может быть вызвано условиями обеспечения требуемого технологического процесса:
![]()
где 0 =0,7...0,78 — для двигателей закрытого исполнения. Вычисляем требуемый номинальный момент двигателя:
![]() ,
(12.7)
,
(12.7)
где TНКmах — максимальный момент сопротивления на К-м рабочем участке циклограммы нагружения, Н-м;
Тип электродвигателя выбирают по каталогам исходя из условий:
![]()