

10.4. Радарные датчики в мехатронных модулях движения автомобилей.
Для повышения безопасности автомобилей все шире применяются системы обнаружения препятствий, например, основанные на радарах.
Так как автомобильный рынок стремится использовать для обнаружения препятствий преимущества различных методов, в настоящий момент сравнительный анализ технологий активной безопасности весьма актуален.
Системы, основанные на видеокамерах, в автомобильных системах активной безопасности являются, пожалуй, доминирующей сенсорной технологией.
Видеокамеры позволяют выполнять многие функции систем помощи водителю (СПВ), оценивать скорость и расстояние до впереди идущего автомобиля, осуществлять мониторинг полосы и так далее, но их надежность ограничивается погодными условиями и условиями освещения.
Радары, или радарные системы позволяют обнаруживать, отслеживать объекты и обрабатывать изображения.
Основные области автомобильных применений радаров сконцентрированы в системах адаптивного круиз-контроля (АКК), где они выполняют функции обнаружения объектов и слежения — для предупреждения фронтальных аварий. Радарные системы миллиметрового диапазона, работающие в диапазоне 76-77 ГГц, с радарами дальнего диапазона (РДД), позволяют детектировать (обнаруживать и распознавать) объекты и определять расстояния в диапазоне 1-150 м с разрешением в 1 м, причем при оптимальном дизайне могут быть определены расстояние, относительная скорость и угол азимута.
Современные АСС основываются главным образом на радарных системах миллиметрового волнового диапазона (включающего диапазон 40-300 ГГц, 1-7,5 мм). АСС подразделяются на импульсные и непрерывного действия, с незатухающей гармонической волной. Последние, в свою очередь, также включают две основные группы: частотно модулированные и системы с рассеянным спектром.
Большинство радаров работает в микроволновом частотном диапазоне (200 МГц — 95 ГГц, длины волн 0,67 м — 3,16 мм).
АКК на основе радаров устанавливается в автомобили BMW серии 3, Volkswagen Passat, некоторые модели Mitsubishi, Mercedes-Benz, Toyota и др.
Радары 77 ГГц имеют апертурный угол порядка 10°. Следующее поколение полноскоростных АКК требует расширения угла наблюдения для повышения возможности обзора препятствий на различных расстояниях. С дополнительными датчиками на 24 ГГц АКК более пригодны для реализации функций регулирования жесткости амортизатора, предупреждения непреднамеренного ухода с полосы (ПНУП ), ассистирования в удержании на полосе (АУП), помощи при смене полосы (ПСП), мониторинга «мертвых зон». Среди возможных частотных диапазонов для датчиков автоматического регулирования амортизатора выбрана частотная полоса от 24,00 до 24,25 ГГц.
Окончательная цель автомобильных систем активной безопасности, включая развитие радарных функций, — расширить обзор до 360°.
Радары 24 ГГц, работающие на коротких расстояниях (обычно до 20 м), могут быть использованы для систем предотвращения или смягчения аварий. Возможность избежания аварий будет важнейшей функцией электронных систем новых машин. Так, Mercedes-Benz S-класса оборудуются радаром 24 ГГц для жесткого торможения при неизбежной аварии.
Важнейшим преимуществом радаров является их значительная нечувствительность к погодным условиям, в отличие от лидаров и ультразвуковых датчиков, а также камер видимого и ИК-спектра.
Использование лазерных радаров (лидаров) представляет собой недорогую альтернативу стандартным микроволновым и миллиметровым радарным АКК. Например, лидары Heila KGaA Hueck & Со предлагают снижение стоимости системы АКК на 50%. Лидары устанавливают на свои автомобили, например, DaimlerChrysler, Toyota и Nissan.
Таким образом, преимущества радаров перед ультразвуковыми, оптическими, лазерными и тепловыми методами базируются на следующих особенностях:
невидимый монтаж за непроводящими материалами;
работа в любых погодных условиях;
возможность работы в жестких автомобильных условиях;
быстродействие, возможность параллелизации измерений;
малая интерференция с другими системами;
практически полное отсутствие старения;
высокая точность и надежность предоставляемой информации.
Тем временем японская компания Honda Motor видит в качестве альтернативы радарам, стереовидению и другим сенсорным технологиям 3-мерную технологию Electronic Perception Technology', разработанную Silicon Valley и внедренную Canesta Inc., и планирует применять ее во всех классах своих автомобилей. Фирма Honda за последние три года инвестировала значительные средства в разработку новых систем автомобильной безопасности на основе технологии ЕРТ. Применения ЕРТ включают обнаружение пассажиров, помощь при парковке, обнаружение пешеходов, избежание аварий.
Основными компонентами радара являются трансмиттер, антенна и ресивер.
Основная задача радара — это обнаружение объекта в зоне действия радиосигнала, излучаемого трансмиттером, при котором выход ресивера в данное время соответствует эху, отраженному от объекта. Трансмиттер также содержит усилитель, который увеличивает мощность электромагнитного импульса, и антенну, которая транслирует электромагнитные волны. Радиоресивер получает отраженные от объекта электромагнитные волны посредством антенны, преобразуя их в ток. Для повышения надежности детектирования и отделения полезного сигнала от шумов в схеме обработки сигнала непрерывно выполняется сравнение амплитуды выхода ресивера с некоторым предустановленным или адаптивно вычисляемым порогом. Время, за которое радиоимпульс проходит путь до объекта и обратно, соответствует расстоянию 2R и равняется 2R/с, где с — скорость распространения электромагнитной волны (скорость света). Поскольку скорость света с практически неизменна в любой среде, очевидны преимущества радаров по точности в сравнении с ультразвуковыми датчиками.
После того как объект обнаружен, радар отслеживает его положение или скорость. Моностатический радар измеряет положение в сферической координатной системе с начальной точкой в фазовом центре антенны радара. Направление обзора антенны (называемое boresight direction) лежит вдоль оси X. Угол θ называется углом азимута; для анализа положения используется также угол повышения ср, который зависит от ориентации антенны (рис.10.6) . В большинстве современных систем АКК φ можно не учитывать.
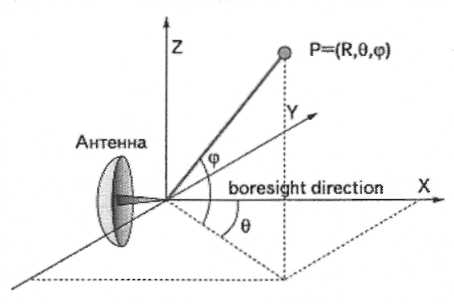
Рис.10.6. Сферическая координатная система для радарных измерений
Моностатическим называется радар, в котором антенны трансмиттера и ресивера объединены (то есть используется одна и та же антенна). Радары данного типа составляют большинство современных устройств. В бистатическом радаре антенны трансмиттера и ресивера разделены.
Угловое положение определяется путем анализа свойств отраженного волнового сигнала. Радар локализует положение цели за счет получения угла азимута относительно опорной линии или точки радарной антенны и расстояния range. Угол азимута цели определяется как угловое расстояние между опорной линией антенны (в направлении перпендикуляра от опорной точки антенны) и прямой, соединяющей опорную точку радарной антенны и апертурную точку цели. Расстояние до цели определяется как расстояние от антенной опорной точки до цели.
Хотя угол азимута и расстояние позволяют вычислить положение цели, возможны ошибки, возникающие вследствие изменений температуры и флуктуаций напряжения волны. Процентная ошибка между вычисленным и фактическим расстоянием может составлять порядка 10-30%; для ее уменьшения в радарных системах используется калибровка.
Скорость оценивается посредством доплеровского смещения эха цели. Эффект Доплера состоит в изменении частоты и длины волн, регистрируемых ресивером, что вызвано относительным движением их источника (детектируемого объекта) или приемника. Когда радар и объект неподвижны, отраженный сигнал будет иметь ту же частоту, что и оригинальный сигнал, и несколько ослабленную амплитуду, то есть скорость, равную нулю, невозможно измерить. Когда детектируемый объект удаляется, второй сегмент сигнала проходит большее расстояние, чем первый сегмент, что растягивает волну, уменьшая ее частоту, длина волны при этом увеличивается. Если же объект приближается к условно неподвижному в выбранной системе отсчета ресиверу, второй сегмент волны проходит более короткое расстояние, что увеличивает частоту принятого сигнала, длина волны при этом уменьшается. Регистрируя изменения частоты, радар вычисляет радиальную составляющую скорости объекта, которой является проекция скорости на прямую, проходящую через объект и радар. Доплеровский метод обеспечивает измерение только радиальной составляющей скорости, но последовательность измерений положения и радиальной скорости позволяют сделать вывод о динамике объекта в трех измерениях.
Отличительная черта радарной системы — тип используемой техники модуляции для получения информации о расстоянии и скорости.
В дальнейшем, по мере увеличения числа автомобилей, оснащаемых радарами, интерференция будет возрастать, что предполагает в течение следующих нескольких лет повышенное внимание автопроизводителей к вопросу снижения уровней мощностей 24-гигагерцовых радаров. Дальнейшие перспективы автомобильных систем связываются с развитием 77-гигагерцовьк радарных технологий. Прогноз развития мирового рынка автомобильной радарной технологии 77 Гц показан на рис.10.7.
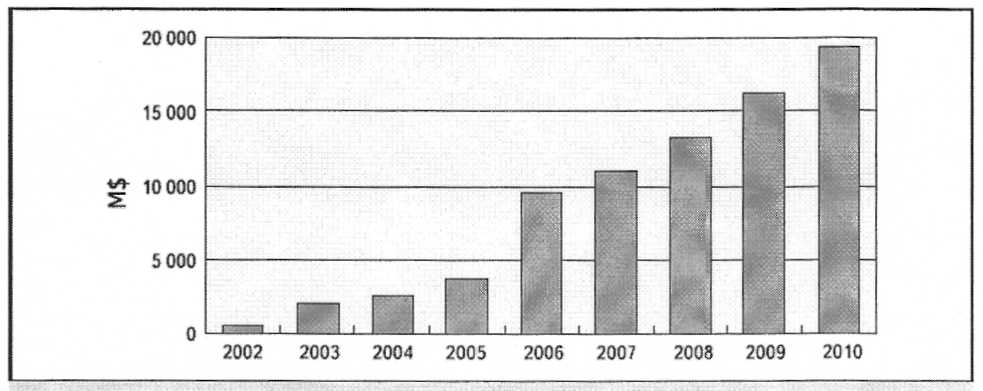
Рис.10.7. Прогноз развития мирового рынка автомобильной
радарной технологии 77 Гц.
В качестве альтернативы 24-гигагерцовым автомобильным радарным системам компания Cambridge Consultants предлагает использовать 5,8-гигагерцовую систему, которая допускает область обзора в ±75° с угловым разрешением порядка 2°, позволяя с одним датчиком измерять угол азимута и подъем (компания акцентирует внимание на ЗВ-функциональности системы). Тот же самый радар может работать с соответствующим программным обеспечением в различных режимах со скоростями сканирования 50-2000 Гц расстояния 2-32 м. Компания рекомендует использовать свои радарные датчики для фронтального и бокового обзора, мониторинга «мертвых зон» и помощи при парковке.
Технология компании Cambridge Consultants может снижать число датчиков, требуемых для мониторинга области вокруг автомобиля, только до четырех (в сравнении с предложениями 8-сенсорных систем). Типичные размеры антенн ― порядка 80 × 120 мм, сравнимые с размерами 24-гигагерцовыхх устройств.
Радарные сигналы от работающей системы всегда определяют расстояние между объектами во фронте автомобиля и относительную скорость и служат для предупреждения водителя об опасных ситуациях посредством только визуальных и звуковых сигналов (без воспроизведения видеоданных).
Из приведенного анализа следует, что радарная технология имеет значительные преимущества по сравнению с другими конкурирующими технологиями ― такими как видеокамеры, инфракрасные детекторы и ультразвуковые датчики (в воздушной среде).
Радарная система ― многообещающая технология при условии снижения ее цены до уровней, приемлемых для массового производства систем автоэлектроники. Поэтому для автоматической системы регулирования жесткости амортизаторов мембранного типа сигналы изменения качества дороги лучше всего считывать с помощью радарных датчиков.